一种检测图像直线倾斜角度的新算法
2014-08-06徐兴东
徐兴东,程 立
(1 中南民族大学 实验教学中心, 武汉 430074 ; 2 中南民族大学 计算机科学学院, 武汉 430074 )
在图像处理中,通常使用HOUGH变换检测直线的倾斜角度.HOUGH变换的基本思想是利用平面空间和参数空间的点-线的对偶性,将平面空间的直线上的点变换到参数空间,得到直线的表达式[1,2].使用HOUGH变换检测直线倾角,具有很强的抗干扰性,能检测出不连续的直线和具有弯曲变形的直线的倾角.该种算法实际上是一种试探的算法,在一定倾角范围内,检测有没有一定角度的直线出现,并统计落在该直线上的点数.很明显,由于要探测多种可能,HOUGH变换算法计算量大,特别是在直线可能出现的倾角范围很大,并且对直线倾角检测精度要求较高时,必须在很大的范围内进行探测,需要更多的计算时间.同时,对于HOUGH变换来说,还需要比较大的存储空间来存储各种探测直线上的点数.
在很多应用中,需要能快速检测出直线的角度.在这里,采取的方法是首先对直线进行细化,然后找到直线的端点,由端点开始沿着直线进行遍历,记下前进的方向码.遍历完毕后,计算方向码的平均值,并进行修正,即可检测出准确的直线的倾角.
1 方向码与角度的关系
在处理中,首先要对直线图像进行细化,即得到直线的轮廓,通过一些方法很容易得到直线边缘的轮廓[3].对于连续的直线,细化后的骨架也是连续的.根据直线上点的8邻域状况,很容易找到一条直线的起点[4].在此主要考虑的是黑点(背景为白色),则一个黑点的8邻域如图1所示.其45°以内的细化直线如图2所示.

图1 点P的8邻域Fig.1 Eight neighborhood diagram of point P
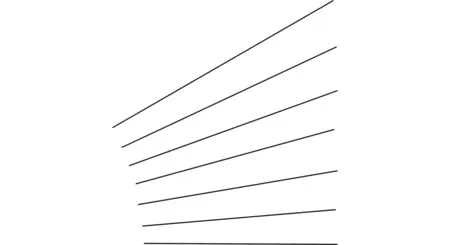
图2 45°以内的细化直线Fig.2 Lines thinned in 45°
其中P为直线上的黑点,0~7为点P的8邻域,很明显,如果邻域0为黑点,则P和0点连线为0°,1为黑点则为45°,称n为点P的方向码,可知方向码n(n=0~7)与角度α关系为:α=45n.
2 直线的角度检测
对于细化后的直线,其端点的8邻域中只有一个黑点,依此可以找到直线的起点.要检测出整条直线的倾斜角度,可以从某一端点开始进行遍历,在遍历过程中,记下所有点到下一点的方向码,然后用方向码的总和除以总点数,即可得到直线倾角的大致角度.我们在这里使用该方法以5°为间隔检测了0~90°的直线,其数据如表1所示.
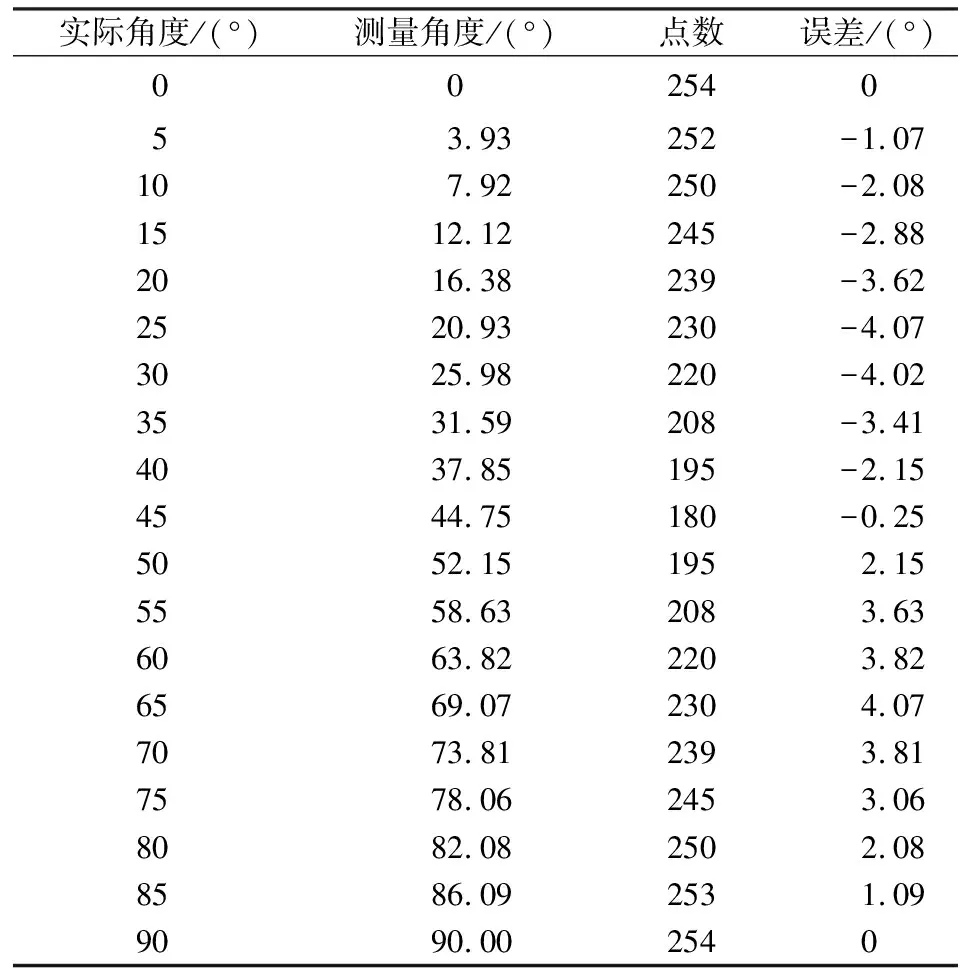
表1 直线的实际值和检测值
依照表1,图3给出了检测角度和误差的曲线图.
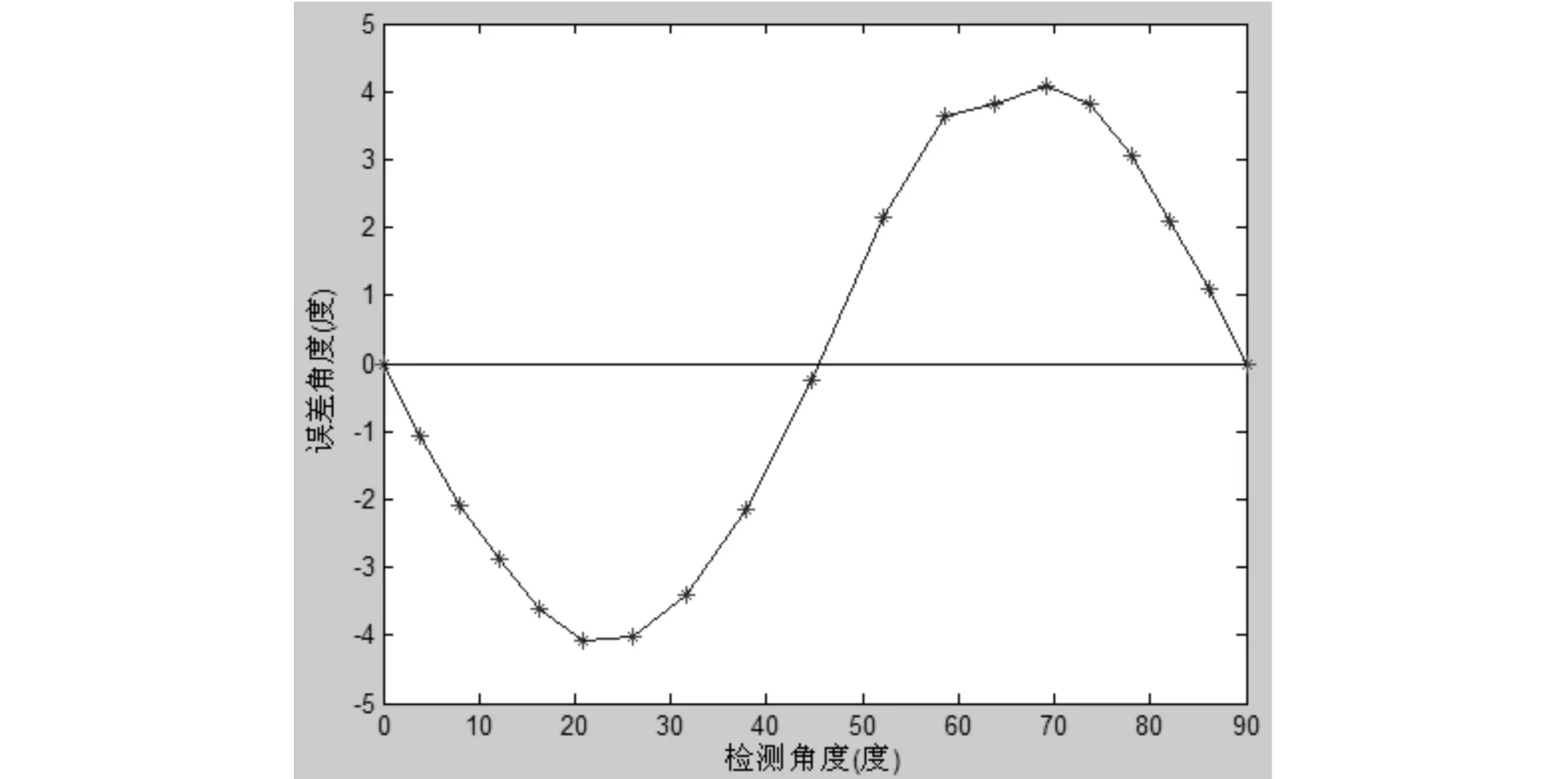
图3 误差-测量角度曲线图Fig.3 Error-angle graph
很明显,误差和测量角度间的关系近似于正弦关系.按照表1的数据进行正弦曲线的拟合,将测量的角度加上拟合后正弦的相反数即为补偿.图4为拟合后的曲线.按照拟合的曲线,补偿之后的直线测量角度为:
α′ =Σn/N,
(1)
α=α′ + 4.20sin(4πα′/180),
(2)
式中n为直线上所有点相对于上一点的方向码,N为总点数,α为修正后的检测角度.

图4 拟合后的误差-测量角度曲线图Fig.4 Error-angle fitting graph
3 补偿的理论依据
在此讨论0~45°的范围,其余范围同理.在0~45°的范围内的直线,细化后,轮廓上的点至下一点(从左至右,从下到上)的方向码只有两种情况,即0和1,如图2所示.设所有方向码为0的点(正右方)总数为n0,所有方向码为1的黑点(右上角)的总数为n1,且直线上点的总数为N(不计起点),则有N=n0+n1;按照方向码均值求的角度为:
α′ = (45×n1+0×n0)/N= (45×n1)/N,
(3)
按照反正切求的角度应为:
α=atan(n1/N)×180/π ,
(4)
则其误差为:
err= 45×n1/N-atan(n1/N)×180/π.
(5)
由图2知,补偿的正弦规律函数在测量角度为0~90°即为一个整周期,故补偿函数的幅值表达式为:
(6)
对此表达式,使用Matlab从总点数N=10到N=10000,n1从0到N(即角度从0~45°)进行计算,可求出A介于4.1873和4.2207之间,变化很小,取最大值和最小值的均值4.2040,作为补偿函数的幅值,即可得到误差很小的直线倾斜角度.将此补偿幅值作为公式(2)中的参数,并以此作为最终的直线倾角检测角度,在设计的VC检测程序中进行检测,能获得非常精确的直线倾角.
4 异常处理
在直线的细化中,可能出现异常的情况,考虑连续的3个黑点,一共有4种情况,如图5所示.其中(a)、(b)中3个点应该在一条水平线上,(c)、(d)中的3个点应该在一条竖直线上.
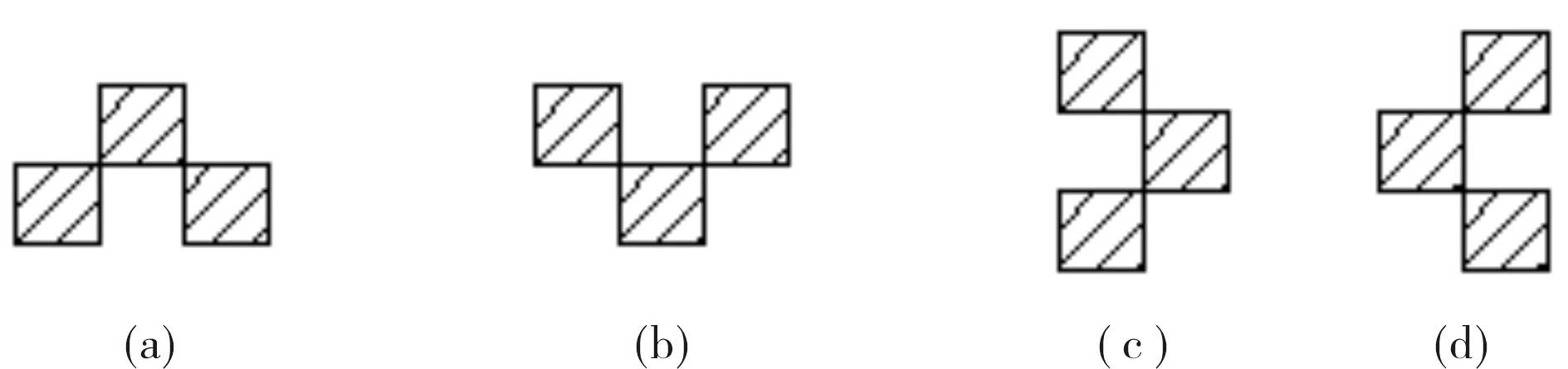
图5 细化后的异常情况Fig.5 Abnormal conditions diagram after thinning process
对于图5(a)、图5(b),遍历直线的方向有从左到右和从右到左两种方式.当采取从左至右遍历时,图5(a)的方向码为1和7,图5(b)为7和1,其和为8,而实际应该为0和0,显然有较大误差.若采用从右至左的方向,则图5(a)、图5(b)的方向码分别为3,5和5,3,其和与实际值4,4之和是相同的.而对于图5(c)、图5(d)无论是采用从上至下还是从下至上的方向进行处理,方向码之和和正常情况都是相等的.很明显,对于图5(a)、图5(b)两图,当采用从左至右的方向遍历时,由于按图(1)图像中任一点P右端3个邻域点的方向码分别为1,0,7,而点P的上侧、左侧和下侧相邻的3邻域中,中间点均为两边点的平均值,所以不用进行处理.综上所述,当出现图5中图5(a)和图5(b)两种情况时,需进行特别的处理,将其变为实际的方向码.
5 时间复杂度分析
本算法相对于HOUGH变换,在时间复杂度和空间复杂度上均具有明显的优势.以图形上某一条具有N个点的直线为例,若采用HOUGH变换检测直线角度,需首先预设直线倾角范围,并设定角度探测步长,也就是检测精度.假设角度范围为[θ1,θ2], 探测步长为Δθ,则采用HOUGH变换时需完成的循环次数为:
(7)
而采用本算法,最坏情况下循环次数为8N, 平均循环次数4N, 即每个点在其8邻域中找其下一点的方向码.采用HOUGH变换时,假设当直线倾角范围为[-45°,45°],检测步长为0.5°,则需循环次数为180N,很明显本算法处理的循环次数大大低于HOUGH变换.并且采用HOUGH变换时,每次循环需计算所探测角度的正弦和余弦,还需实现两次乘法和一次加法,而本算法只需在循环中完成一次加法.可见本算法在时间复杂度上明显低于HOUGH变换,并且检测时处理时间和直线的倾角范围及检测精度无关,只与直线上的点数成线性关系.
6 结果与讨论
按照遍历直线轮廓,求出各点到下一点的方向码的平均值,并做修正后,可以获得直线的准确的倾角.相对于HOUGH变换,本方法计算量小很多;而相对于求反三角函数的方法,本方法不需要讨论角度的范围.表2为经过修正后的直线的测量角度和实际角度,可见经过补偿后,检测的角度和直线的实际角度非常接近,误差很小.而且使用该方法检测直线的角度,既可以遍历到直线的另一端点结束,也可以只遍历一定的点数,检测所需要的时间与直线的倾角范围无关.当然,本算法只能适用于连续直线的情况,对于断续直线,本算法则不适用[5].而且,在使用算法前,首先必须对直线进行细化处理,或者是单像素的直线边缘,其处理情况和图2类似,只是不同角度的直线,方向码不同,所以文中未给出更多的实验图例.
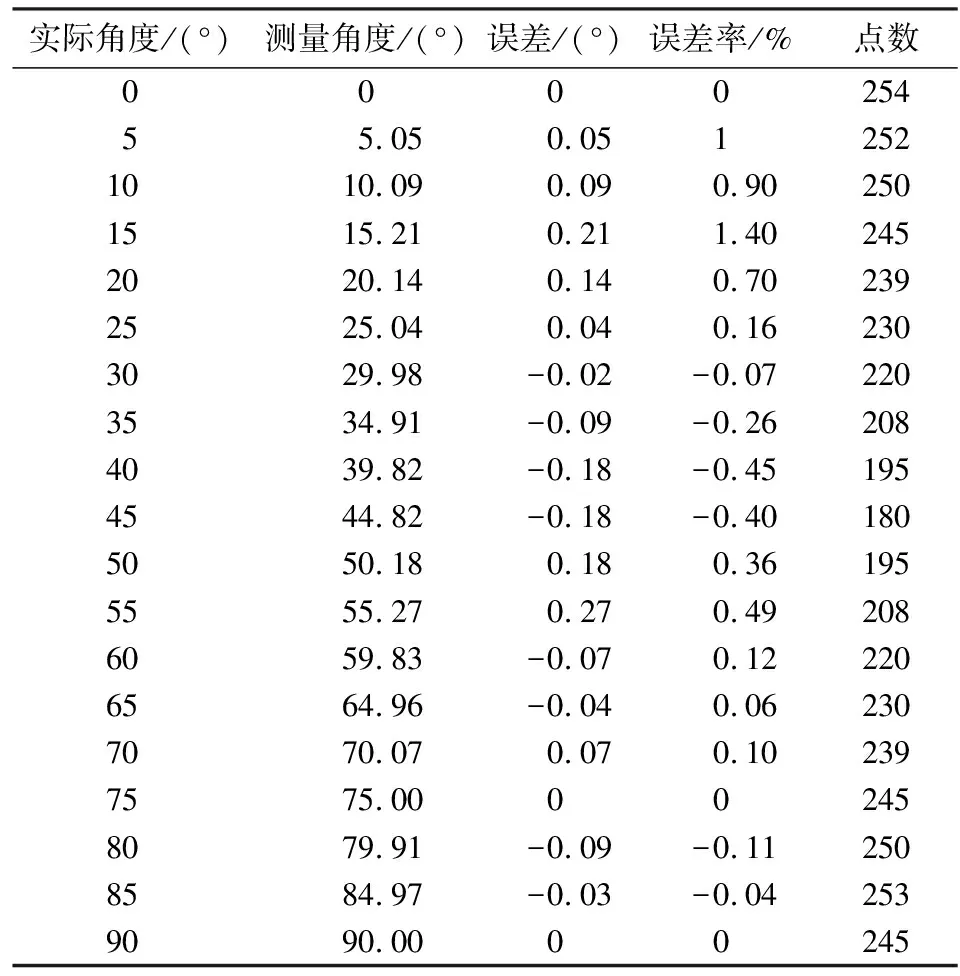
表2 直线的实际角度值和修正后的检测角度值Tab.2 The real and estimate angle after correction of lines
参 考 文 献
[1] 肖志涛, 国澄明, 孟翔宇. 基于Hough变换的倾斜文本图像的检测[J]. 红外与激光工程, 2002,31(4): 315-317.
[2] 赵小川,罗庆生,陈少波. 改进型图像中的直线快速检测[J]. 光学精密工程, 2010,18(7): 1654-1660 .
[3] 杨 威, 郭 科, 魏义坤.一种有效的基于八邻域查表的指纹图像细化算法[J]. 四川理工学院学报,2008, 21(2): 61-63.
[4] 张晓青,王国文,曹海云,等. 基于细化的手写汉字的笔段提取方法[J]. 哈尔滨工业大学学报, 1999, 31(5):107-110.
[5] 程 立,王江晴,田 微,等.手写体女书文字规范化处理程度研究[J].中南民族大学学报:自然科学版,2012,31(1):93-96.
