对立体视觉中对称性假设的检验
2014-08-06石蔷薇王元平周佳奇
谢 莺,石蔷薇,李 彬,王元平,周佳奇
(中南民族大学 生物医学工程学院, 武汉 430074)
由于人眼之间存在大约6.3 cm的间隔,外部世界投射到两侧视网膜上所成的像并不完全相同.正是左右眼图像的微小差异,提供了双眼从2D网膜像恢复出3D世界的信息[1].
在左右眼图像中,人们认为,深度信息的一个来源是视差[1],即两眼图像中对应特征、又称配对特征的相对位置差;深度信息的另一个来源来自于单眼性特征,又称非配对特征[2].这些特征仅在一只眼图像中呈现,被认为起源于遮挡,根据定义,在对侧眼中没有匹配对象,因此不能产生视差信号.尽管在过去相当长的一段时间内,人们主要关注双眼性视差在深度知觉中的作用[1,3-5],但近年来,越来越多的研究者开始关注单眼性特征在深度知觉中的重要作用[6-10]. 人们认为,单眼性特征在揭示深度不连续性、以及深度定位上都发挥了重要作用[11].
为了鉴定双眼性视差和其他不同于视差的因素对立体深度的贡献,研究者提出了一种认为非常简便有效的技术,即交换左眼和右眼图像[10,12,13].这一技术的提出是基于当前立体视觉理论中的一种隐性对称性假设,即认为两眼中图像的匹配与哪只眼观察哪一图像无关,而仅取决于两眼映像特征的相似性[4,5].也就是说,人们认为,当交换左眼和右眼的立体图像时,两幅图像包含的信息是不变的,所改变的只是接收给定图像的眼睛. 因此,原来两幅图像形成的匹配不会因为交换而发生改变,所发生的仅仅只是位置视差值符号的颠倒,它导致图像中所有配对特征的深度发生颠倒;相反,如果交换了两只眼的图像但某个区域的立体深度不颠倒,他们认为,那必定是某种匹配之外的因素对映像的知觉深度起了作用[10,12,13]. 譬如,研究者认为,单眼性特征在对侧眼中没有匹配,因此它们的深度在图像交换前后不应该颠倒,而是遵循“最远表面原则”[2,6,10,12-14]总是处于最远处. 因此,交换左眼和右眼图像这样一种简单的实验操作,被认为提供了一种非常简便有效的技术,用于鉴定双眼性视差和其他不同于双眼性视差的因素对立体深度的贡献.
本文采用2∶2直线型刺激构型,证明上述观点是错误的.在前期的研究中,我们采用2∶2直线型刺激构型,发现了常规立体视中的双重融合现象[15].本文将采用同样的构型,证明匹配的选取不仅仅取决于两眼映像特征的相似性,还与哪只眼观察哪一图像有关;并证明,交换左眼和右眼图像后深度是否颠倒,并不是判断深度是来源于匹配视差还是其他因素的依据.
1 实验
1.1 实验刺激
本实验采用两种2∶2直线型刺激构型,分别都是由一边间隔较宽、另一边间隔较窄的直线对组成.其中,呈现给一只眼的间隔较宽的两根直线的间隔相等,都是17.3分弧度(即17.3′);而呈现给另一只眼的间隔较窄的两根直线,在第1种刺激构型中为12.1′(如图1(a)所示),在第2种刺激构型中为5.2′(如图1(b) 所示).所有直线的高度均为69.2′,宽度为3.5′.为了清楚描述直线之间的匹配关系,将间隔较宽的两根直线命名为WL、WR;而将间隔较窄的两根直线命名为NL、NR.
为了显示直线之间的匹配对应关系,在直线的上下方均引入一对双眼性探针.每一对探针分别与左右眼直线中任意一对直线在垂直方向对齐.对于每一刺激构型,探针组合方式有16种.但与直线的对齐方式只有4种, 即分别与直线NL和WL、NR和WR、NL和WR或NR和WL对齐.
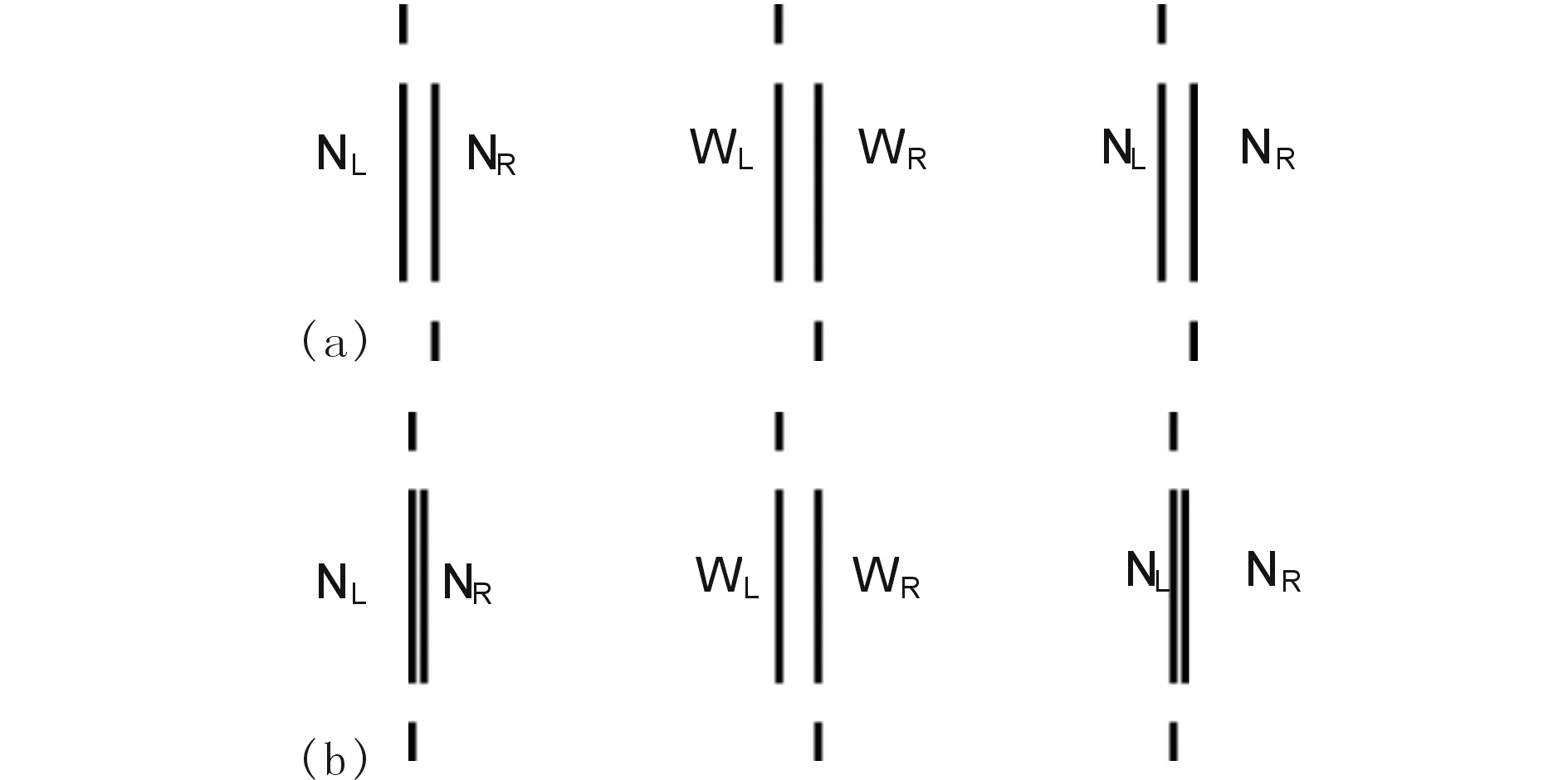
(a) 第1种刺激构型;(b)第2种刺激构型图1 实验中采用的刺激构型及探针的图示Fig.1 Schematic diagrams for the stimulus configurations and the binocular probes used in the experiment
1.2 被试
被试共8名,视力或矫正视力正常.在正式实验前,均通过观察随机点立体图以确定立体视正常.
1.3 实验仪器
实验刺激图形由Window NT 图形工作站产生,呈现在三维液晶显示器上(SD2320MW,美制).显示器分辨率为1280×1024,刷新率为75Hz.呈现给左右眼的两根直线分别呈现到上下显示器中央.实验时被试需戴上正交偏振滤光镜获取相应的分视信号,即左眼只看到下显示器、右眼只看到上显示器的图像.实验在低照度环境中进行.观察距离为60 cm.
1.4 实验程序
在实验中,具有16种探针组合的第1种刺激构型和第2种刺激构型分组块随机呈现,且间隔较宽的成组直线呈现给哪只眼(左眼或右眼)也是随机的.观察时间不限.被试的任务是,在双眼融合稳定后报告直线及其上下方探针的情况,要求被试仔细分辨探针与相应直线之间的深度关系.
2 实验结果和分析
2.1 第1种刺激构型
对于第1种刺激构型,所有被试都只能观察到2根处于不同深度的直线.可以发现,当间隔较宽的直线呈现给左眼时(用L表示),不管探针在直线上方还是下方,当一对探针分别与直线NL和WL对齐时,可观察到融合后的探针与左边直线处于同一深度(用Y表示探针与某一直线处于同一深度);当探针与直线NR和WR对齐时,可观察到融合后的探针与右边直线处于同一深度;而当探针与直线NL和WR、或直线NR和WL对齐时,则观察到融合后的探针与左右直线都不在同一深度(用N表示探针与任一直线都不处于同一深度). 以上结果见表1的左半部分.

表1 第1种刺激构型中的探针与直线的深度关系Tab.1 Depth relationship between the probes and the lines in the first stimulus configuration
当左眼和右眼的图像进行交换,即当间隔较宽的直线呈现给右眼(由R指示)时,被试观察到左右两根直线的深度发生了颠倒,但探针实验结果与间隔较宽的直线呈现给左眼的结果完全相同,还是直线NL和WL匹配,直线NR和WR匹配,直线NL和WR、或直线NR和WL之间没有发生匹配融合.实验结果见表1的右半部分.
这些结果证明,在第1种刺激构型下,左右眼直线之间形成的匹配是唯一的,且立体视觉中的隐性对称性假设成立,即直线之间的匹配没有因为左眼和右眼图像交换而发生改变,所改变的仅仅只是位置视差值符号的颠倒,它导致匹配产生的两根直线的深度发生了颠倒.
2.2 第2种刺激构型
对于第2种刺激构型,所有被试均观察到3根处于不同深度的直线.可以发现,当间隔较宽的直线呈现给左眼时,不管探针在直线上方还是下方,当探针与直线NL和WL对齐时,可观察到融合后的探针与左边的那根直线处于同一深度;当探针与直线NR和WR对齐时,可观察到融合后的探针与右边的那根直线处于同一深度.实验结果显示在表2的左半部分.这些结果表明,在第2种刺激构型条件下,虽然被试观察到3根直线,但左边直线依然由直线NL和WL融合产生,右边直线依然由直线NR和WR融合产生.但是,对于分别与直线NL和WR、或NR和WL对齐的探针,则双眼融合后观察到的探针与相应直线的深度关系则随被试不同而有差异.具体而言,尽管所有被试都观察到3根直线,但不同被试看到的中间第3根直线的深度是不一样的:有的看到中间直线最浅,有的看到最深,还有的被试一会儿看到中间直线最浅,一会儿看到最深,但两种情况不会同时看到.相应地,分别与直线NR和WL、或直线NL和WR对齐的探针随被试观察到中间直线的深度规律性地发生变化:对于观察到中间直线最浅的被试,他们发现,与直线NL和WR对齐的探针与中间直线处于同一深度,而与直线NR和WL对齐的探针与任何一根直线均不在同一深度,表明在这种情况下中间直线由直线NL和WR融合产生;相反,对于观察到中间直线最深的被试,他们发现,与直线NR和WL对齐的探针与中间直线处于同一深度,而与直线NL和WR对齐的探针与任何一根直线均不在同一深度,表明在这种情况下中间直线由直线NR和WL融合产生.而对于那些一会儿观察到中间直线最浅、一会儿最深的被试,他们发现,当观察到中间直线最浅时,与直线NL和WR对齐的探针与中间直线处于同一深度,而与直线NR和WL对齐的探针与任何一根直线均不在同一深度;相反,当观察到中间直线最深时,与直线NR和WL对齐的探针与中间直线处于同一深度,而与直线NL和WR对齐的探针与任何一根直线均不在同一深度.这些结果表明,对于这些被试而言,中间直线既可由直线NL和WR融合产生,也可由直线NR和WL融合产生,但两种情况不会同时出现. 值得指出的是,探针与直线不在相同深度的实验结果,本身可作为对照,排除关于探针与直线处于相同深度是由于深度俘获的可能疑问.
这些结果再次证明了常规立体视构型下的双重匹配融合现象:即在第2种刺激构型下,直线NL除了与直线WL、还与直线WR发生了匹配融合,直线NR除了与直线WR、还与直线WL发生了匹配融合.只不过对于不同被试、甚至同一被试的不同时刻,发生双重融合的直线可能是不同的.
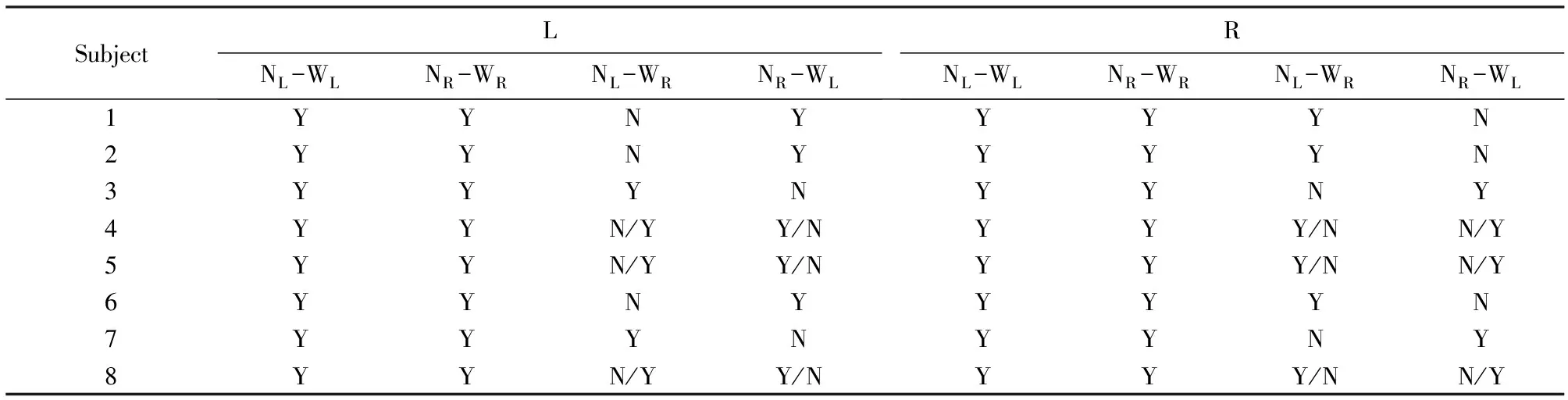
表2 第2种刺激构型中的探针与直线的深度关系Tab.2 Depth relationship between the probes and the lines in the second stimulus configuration
当间隔较宽的直线呈现给右眼时,第2种刺激构型的实验结果显示在表2的右半部分. 可以发现,在这种情况下,被试依然观察到3根直线,左边直线依然由直线NL和WL融合产生,右边直线依然由直线NR和WR融合产生,而中间直线则有的由直线NL和WR融合产生,有的由直线NR和WL融合产生,还有的在两种状态之间变化. 似乎这种情况下的实验结果与间隔较宽的直线呈现给左眼时完全一样. 但是,通过对比同一被试在图像交换前后的实验结果可以发现,中间第3根直线与探针之间的对应关系其实发生了改变. 譬如,对于被试1、2和被试6,当间隔较宽的直线呈现给左眼时,他们观察到,与直线NR和WL对齐的探针与中间直线处于同一深度,而与直线NL和WR对齐的探针与任何一根直线均不在同一深度,表明在这种情况下中间直线由直线NR和WL匹配融合产生;相反,当间隔较宽的直线呈现给右眼时,他们发现,与直线NL和WR对齐的探针与中间直线处于同一深度,而与直线NR和WL对齐的探针与任何一根直线均不在同一深度,表明在这种情况下中间直线由直线NL和WR匹配融合产生. 对于被试3和7,情况却正好相反:当间隔较宽的直线呈现给左眼时,他们观察到,与直线NL和WR对齐的探针与中间直线处于同一深度,而与直线NR和WL对齐的探针与任何一根直线均不在同一深度,表明在这种情况下中间直线由直线NL和WR匹配融合产生;相反,当间隔较宽的直线呈现给右眼时,他们发现,与直线NR和WL对齐的探针与中间直线处于同一深度,而与直线NL和WR对齐的探针与任何一根直线均不在同一深度,表明在这种情况下中间直线由直线NR和WL匹配融合产生. 匹配融合对象的改变,导致在双眼图像交换前后,被试观察到中间直线的深度并没有发生颠倒:那些观察到中间直线处于最浅位置的被试,当图像交换后,依然观察到中间直线处于最浅位置;那些观察到中间直线处于最深位置的被试,依然观察到中间直线处于最深位置.
3 讨论和结论
在当前的立体视觉理论中,人们隐性地假设,两眼中图像的匹配与哪只眼观察哪一图像无关.在此假设基础上,研究者提出了一种通过交换左眼和右眼图像,来鉴定双眼性视差和其他不同于视差的因素,如遮挡,对立体深度的贡献的技术.他们认为,配对特征的深度在图像交换前后会发生颠倒;相反,如果某个区域的立体深度在图像交换前后不发生颠倒,则必定是由于某种匹配之外的因素对映像的知觉深度起了作用.
本研究采用2∶2直线型常规立体视构型,并通过对比左眼和右眼图像交换前后的直线融合情况,发现在发生唯一性融合的第1种刺激构型下,无论间隔较宽的直线呈现给左眼还是右眼,两眼中直线NL和WL、直线NR和WR之间形成的匹配确实不会因为图像交换而发生改变:总是直线NL和WL匹配,直线NR和WR匹配,且它们匹配融合产生的左右两根直线的相对深度在图像交换前后会发生颠倒,证明立体视觉研究中的隐性对称性假设在这种情况下确实是适用的.
但是,对于发生双重融合的第2种刺激构型,隐性对称性假设却并不成立. 在第2种刺激构型下,虽然直线NL和WL、直线NR和WR之间形成的匹配在左眼和右眼图像交换前后没有发生改变,且它们匹配融合产生的左右两根直线的相对深度,在左右眼图像交换前后发生了颠倒;但是,对于直线NL和WR、直线NR和WL之间形成的匹配而言,它们却会因为左眼和右眼图像交换而发生改变——在一种情况下是直线NR和WL之间发生匹配融合而直线NR和WL之间不形成匹配,在另一种情况下却是直线NL和WR之间发生匹配融合而直线NR和WL之间不形成匹配,并由此导致匹配融合产生的中间第3根直线的深度,在左右眼图像交换前后并不发生颠倒:有的被试在双眼图像交换前后都观察到中间直线处于最浅位置;有的在双眼图像交换前后都观察到中间直线处于最深的位置;还有的被试在图像交换前后都是一会儿观察到中间直线处于最浅、一会儿观察到处于最深的位置,而并不是像遮挡理论的预期的那样,遵循“最远表面原则”总是处于最远处.
可见,直线之间匹配的选取,并非与哪只眼观察哪一图像无关;在所有匹配特征均为完全相同直线的情况下,匹配融合的对象会根据较宽间隔直线呈现给左眼还是右眼而发生改变. 此外,由于3根直线的产生都是不同直线之间发生匹配融合的结果,因此,交换两只眼的图像但立体深度不颠倒,并不像某些学者所认为的,必定是某种匹配之外的因素对映像的知觉深度起了作用. 由此自然可以得出结论,交换左眼和右眼图像后深度是否颠倒,并不是判断其深度是来源于匹配视差还是其他因素的依据.
参 考 文 献
[1] Wheatstone C. Contributions to the physiology of vision (i) on some remarkable and hitherto unobserved phenomena of binocular vision[J]. Philosophical Transactions of the Royal Society of London, 1838, 128: 371-394.
[2] Nakayama K, Shimojo S. Da vinci stereopsis: depth and subjective occluding contours from unpaired image points[J]. Vision Research, 1990, 30(11): 1811-1825.
[3] Julesz B.Foundations of cyclopean perception[M].Chicago:University of Chicago Press, 1971.
[4] Marr D, Poggio T. Cooperative computation of stereo disparity[J]. Science, 1976, 194: 283-287.
[5] Pollard S B, Mayhew J E W, Frisby J P. A stereo correspondence algorithm using a disparity gradient limit[J]. Perception, 1985, 14: 449-470.
[6] Anderson B L. The role of partial occlusion in stereopsis[J]. Nature, 1994, 367: 365-367.
[7] Gillam B, Borsting E. The role of monocular regions in stereoscopic displays[J]. Perception, 1988, 17: 603-608.
[8] Liu L,Stevenson S B,Schor C M.Quantitative stereoscopic depth without binocular correspondence[J]. Nature, 1994, 367: 66-69.
[9] Gillam B, Nakayama K. Quantitative depth for a phantom surface can be based on cyclopean occlusion cues alone: A comment on Liu, Stevenson and Schor[J]. Vision Research, 1999, 30: 109-112.
[10] Anderson B L. Stereovision: beyond disparity computa-tions[J]. Trends in Cognitive Sciences, 1998, 2 ( 6): 214-222.
[11] Gillam B, Blackburn S, Nakayama K. Stereopsis based on monocular gaps:metrical encoding of depth and slant without matching contours[J]. Vision Research, 1999, 39: 493-502.
[12] Anderson B L, Nakayama K. Towards a general theory of stereopsis: binocular matching, occluding contours, and fusion[J]. Psychological Review, 1994, 101: 414-445
[13] Anderson B L. The Role of Occlusion in the Perception of Depth, Lightness, and Opacity[J]. Psychological Review, 2003, 110(4): 785-801.
[14] Julesz B. Binocular depth perception without familiarity cues[J]. Science, 1964, 145:356-362
[15] 谢 莺,李升明,陈心浩,等.常规立体视中的双重融合现象[J].武汉大学学报:理学版,2012, 58(2): 190-184.