基于航空影像匹配点云构建城区DSM的方法研究
2014-08-01张伟阁杨辽曹良中贾洋
张伟阁,杨辽,曹良中,贾洋
(1.中国科学院新疆生态与地理研究所 荒漠与绿洲生态国家重点实验室,乌鲁木齐 830011;2.中国科学院大学,北京 100049)
1 引 言
数字摄影测量系统在测绘行业已经广泛使用,摄影测量的数据处理不同程度地实现了自动化生产。在严密的空中三角测量下,摄影测量系统可获取高精度的外方位元素和加密点,通过匹配可构建出数字表面模型。用于生产数字表面模型的影像匹配算法很多,如基于规则格网整体松弛匹配算法,空间连续性约束的神经网络影像匹配算法,基于小波变换的松弛法影像匹配算法等[1-4]都达到了很好的匹配效果。多数摄影测量系统软件在严密的算法支持下,可以提取精度较高的密度点云,如ERDAS LPS ATE(Automatic)、武汉大学的数字摄影测量网格DPgrid、Inpho的Match-T DSM、法国地理院的Pixel Factory,都提供了DSM自动获取模块。
点云数据用于城区建筑物DSM构建在LiDAR技术的支持下取得了快速的研究进展。LiDAR系统在数据获取方面优势明显,不受太阳角度和阴影影响,可以连续自动、直接、快速地获取地表三维数据,但是昂贵的成本也降低了它的实用性。航空影像匹配的点云数据在一定程度上可以替代LiDAR系统,用于构建DSM、城市三维建模等应用。
航空影像匹配的点云为不规则的三维离散点,通过逐点内插,可构建DSM。常用的内插方法有不规则三角网线性内插、最邻近距离插值和移动曲面内插法[5]等。不规则三角网线性内插不可保留城区建筑和地面地物的差异,无法顾及地物之间的高程关系,插值时会出现三角网穿透建筑物和地面的情况,形成三角斜面,影响几何精度。最邻近距离插值虽可达到精度较高的建筑物几何信息,但是构建的建筑物DSM会出现明显的锯齿现象。移动曲面内插在数据点较稀或分布不均匀时,拟合可能产生很大的误差,对于具有较弱特征的建筑物区域,无法保证内插整个区域的建筑物边缘,且难以满足几何精度要求。本文根据以上问题提出基于建筑物角边信息约束不规则三角网构建DSM的方法,通过实验证明该方法在优化建筑物的边缘信息上有较高精度,达到精细城区DSM的目的。
2 建筑物约束构建DSM的方法
航空影像匹配的离散三维点云有人工构造物、地面点、植被等信息。点云建立三角网的基本方法是把最邻近的三个离散点连接成不规则三角形,考虑到地物特征的复杂性、一些特征点线会对三角网造成影响。使用地物中的特征线作为三角网的边,可以最大符合度地表现实际地物DSM格网。采用不规则三角网渐进滤波过滤算法可以分割出地面附着点与非地面点,进而基于高程纹理信息分割出建筑物点云。最邻近插值法对建筑物点云按高程值密度分割出深度影像。Sobel算子提取建筑物边缘,规则化建筑物边角,优化的建筑物点云与地面附着点以及高大植被融合构建城区DSM。本方法构建DSM的流程如图1所示。

图1 建筑物矢量约束构建DSM流程
3 算法及实验
3.1 不规则三角网渐进滤波
Axelesson提出的渐进TIN加密滤波算法,针对城市地区大量间断线的判断起到很大地作用。渐进加密TIN的思想是通过种子核心点构成一个稀疏的三角网,迭代逐层加密TIN,种子TIN起初在加密网的下方,TIN的曲面斜率受到构网参数的影响,渐进加密的TIN在参数限制下不断拟合真实不连续密集点[6]。商业软件基于MicroStation的TerraSacn中实现的Axelesson滤波就是采用这样的算法:
①中值滤波处理初始点云,去除离群噪声点,避免对原始地形造成错误判断。
②生成初始TIN,构建粗略网,赋予TIN中最低点阈值范围形成初始TIN。
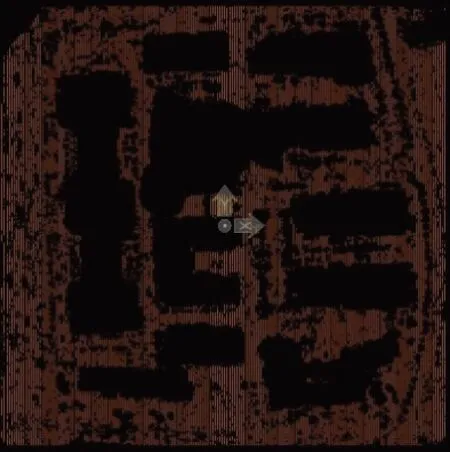
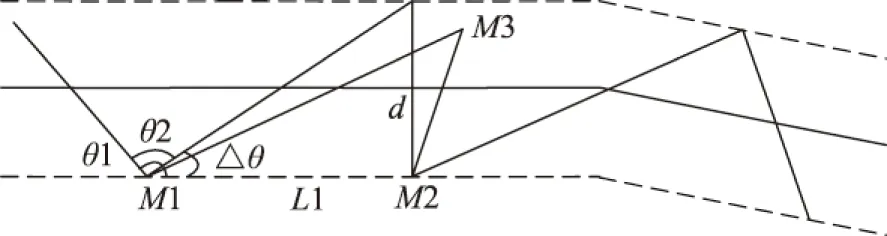
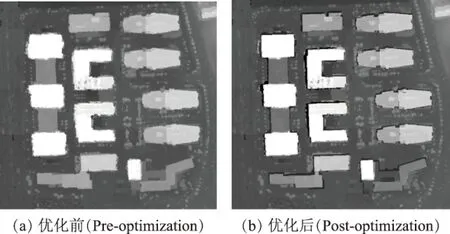
③渐进加密TIN,TIN中点p邻域U(p,£)={x|p-£ 该算法对复杂城市地区附着植被、建筑物的地形有很大的实用性,可以过滤地面点。实验数据过滤结果如图2、图3、图4所示。 图2 地表点 图3 地面附着点 图4 建筑物及高大植被点 高程纹理是表现基于点云数据局部区域高程变化产生的物理特征,如对比度、均匀性、聚合性等特征的表象。高程纹理除了高度信息以外,还是识别地物重要的依据。高程纹理应用在点云过滤可以做点级的分割[7],达到区分高值地物的目的。 大多建筑物过滤算法在过滤时基于局部的相似性,局部的坡度差或局部的高度差都会作为算法的参数阈值。在城市地区,建筑物与树木顶部比较接近,过滤建筑物时会把房屋构造物与高大植被分到一类,难于精确过滤掉树枝等噪声[8]。高程纹理表现在建筑物和树木内部有很小的纹理属性,但在树木和建筑物边缘区域有很高的纹理特征,用高程纹理信息辅助建筑物点云过滤,可以达到稳健的效果[9]。 高程纹理在本质上可区别建筑物与树木,建筑物表面规则,边角点高程变化大,内部区域一般变化很小,连续性很好;树木由于生长不规则,边缘和内部都在高程上变化很大,没有连续性的特征。本文采用LiDAR Analyst软件,在过滤建筑物与植被时充分考虑高程纹理信息,其过滤算法在处理过程中通过设置4个参数阈值(建筑物面积S、坡度阈值L、高度H、纹理差C)去归纳高程纹理干预,具有很强的边缘连续性检测能力,可用于城区复杂的地物,稳健地过滤建筑物。 图5 建筑物过滤 首先将建筑物点云按照规则格网重采样进行格网化处理,得到数字表面模型。为了保护建筑物边缘与背景区域的差异,方便建筑物边角的提取,同时减少网格化插值带来的误差,采用最近点法插值[10]。根据原始数据的属性要求,格网间距为0.1m,大小为1000×1000格网。根据格网不同高度值,按照密度分割进行灰度量化(式(1)),生成高程值灰度影像,灰度影像采用8位深度。实验效果如图6所示。 (1) 图6 高程密度分割深度影像 高程深度影像与灰度影像有相关性的表现,在属性意义上可以用图像处理的技术处理高程深度影像。高程深度影像的灰度值与点云数据的高程值有线性相关的对应关系,且建筑物的外轮廓与背景区域有明显的对比度,在影像上表现为封闭的多边形,易于识别轮廓特征线。 由于点云数据的不规则跳跃性,生成的高程深度影像在边缘处有较大地不规则变化,再加上建筑物在边缘设计上有变种多样性,使深度影像边缘灰度值不连续,给边缘提取造成更大难度。边缘检测及提取在DSM建筑物边缘优化的研究中起到至关重要的作用,因此选取最优的检测方法直接影响到DSM的精度。几种典型的边缘检测算子为Roberts算子、Canny算子、Sobel算子。 影像深度按梯度值分为两类,并找到最佳的阈值N,若梯度值R(I,j)>N,则点(I,j)为图像的边缘,否则为建筑物内部区域。 Sobel算子用像素点上下左右相邻点像素灰度加权差值,在边缘处用极值检测边角,对噪声的平滑效果明显,且运算效率高,在边缘强度估计的同时能产生线性方向信息,因此采用Sobel算子检测深度影像建筑物边缘。建筑物轮廓提取如图7所示。 图7 建筑物轮廓线 基于深度影像初步提取的建筑物边角轮廓线呈锯齿状,非常粗糙[12]。对于需要规则处理的原始轮廓线,提取建筑物形状发生变化的多边形拐点,即关键点位,需要过滤掉中间部位的过程点,简化原始轮廓线,提取轮廓线的骨架信息。对拐角部位直角优化,进而优化轮廓线,得到规则化的矢量线。 如图8所示,管子算法又叫袖子算法,用于多点轮廓线的简化。对于直径为d的管子,当边界点的变化大于d时,则变化点位被判定为轮廓线的拐点,需保留点;当边界点的变化小于d时,轮廓线没有发生本质的变化,变化点被判为中间过程点,需删掉。依据上述理论,从边线M1和M2开始,记M1M2方位角为ϑ1,在长度L1处的M2做垂线d即为管子直径,求解Δθ=tan-1(d/L1),则Δθ可判断下一个点的变化范围。记M1M3的方位角ϑ2,判断ϑ2∈(ϑ1± Δϑ1),若在此区间范围,则该点不是拐点,属于过程点,需滤除;若超出区间范围,则该点是拐点,需保留。 图8 管子算法原理示意图 该算法可以动态运算边界点,不用将全部点同时参与运算,算法同时考虑方位角变化和整体形状的变化,这样,边缘剧烈的角度变化不会对整体边界产生影响。同时,利用关键点可以最小二乘法拟合同一边线的关键点,也可以直接制作边界多边形。实验数据赋管子直径d值为0.3m,规则效果如图9所示。 图9 管子规则化建筑物矢量 建筑物矩形轮廓边界的规则是将不规则四边形转成边界两两平行的矩形[12]。假设规则化的四边形边界有外接圆,多边形的4个关键点落在圆上,由于圆上的点与圆的直径构成直角,则符合假设的四边形边界必为矩形。依据上述论证,矩形外接圆法规则化轮廓线的算法可分为3部分: ①求解两条对角线的交点作为轮廓线边界的外接圆圆心。②4个点到圆心的平均距离为半径绘制外接圆。③求外接圆与对角线的交点,连接4个交点绘制矩形边界。 矩形外接圆法规则化效果如图10所示,规则建筑物、地面点及高大植被构建城区DSM如图11所示。 图10 矩形外接圆法建筑物规则化 图11 城区DSM 因为建筑物边角矢量线的高程由深度影像上边缘点内插获取,尽管经过算法优化边线,所构建的DSM仍存在一些误差。本文选取建筑物顶角点位量测其高程值Z′,记录DSM相同点位的高程值Z,计算DSM的高程误差DZ。则高程平均误差DZ平均=0.0167m,均方根误差RMSE=0.0712m。表格表明本方法构建的DSM建筑物边缘信息高程精度较高。 表1 DSM高程误差值 本文提出建筑物边缘矢量优化并构建DSM的方法。在点云过滤时,清除掉地面点及植被等指标附着物,消除高大植被对建筑物构建DSM模型的影响,能大大提高建筑物模型的精度。采用建筑物边角矢量约束构建DSM的方法可避免构建三角网引起的定位不准,使得构建的DSM模型边界更精确。 建筑物轮廓规则化的边界矢量是直线的特征,圆形、弧形等复杂建筑物边缘特征的规则化则无法实施,需进一步研究相关算法;建筑物轮廓线的精度评价没有科学的方法,获取更高精度的轮廓线可更大程度上约束并构建高精度DSM,需要进一步研究提取轮廓线的方法并精度评价。 致谢:感谢国家科技基础平台-地球系统科学数据共享平台-新疆与中亚科学数据共享平台资助(Supported by Xinjiang & Central Asia Science Data Sharing Platform of Earth System Science Data Sharing Platform of National Science & Technology Infrastructure)。 参考文献: [1] 江万寿,郑顺义,张祖勋,等.航空影像特征匹配研究[J].武汉大学学报(信息科学版),2003,28(5):510-513. [2] 仇丹.基于小波变换的松弛法影像匹配[J].武汉测绘科技大学学报,1998,23(2):145-148. [3] 张力,沈未名,张祖勋,等.基于视差变强度空间连续性约束的神经网络影像匹配[J].武汉测绘技术大学学报,2000,25(1):55-59. [4] ROSENHOLM D.Multi-point matching using the least squares technique for evaluation of three-dimensional models[J].PERS,1987,8(6). [5] 李迁,肖春蕾,陈洁,等.基于机载LiDAR点云和建筑物轮廓线构建DSM的方法[J].国土资源遥感,2013,25(2):95-100. [6] 李卉,李德仁,黄先锋,等.一种渐进加密三角网LIDAR点云滤波的改进算法[J].测绘科学,2009,34(3):39-40,216. [7] 夏冰,苏国中,周梅,等.LIDAR点云中高精度建筑物分割算法研究[J].微计算机信息(控制自动化),2010,26(5-1):210-211,191. [8] 张熠斌,隋立春,曲佳,等.基于数学形态学算法的机载LiDAR点云数据快速滤波[J].测绘通报,2009,(5):16-18,65. [9] 刘修国,张靖,高伟,等.Lidar点云数据中建筑物的快速提取[J].地球科学-中国地质大学学报,2006,31(5):615-618. [10] 孟峰,李海涛,吴侃.LIDAR点云数据的建筑物特征线提取[J].测绘科学,2008,33(5):97-99,108. [11] 周心明,兰赛,徐燕.图像处理中几种边缘检测算法的比较[J].现代电力,2000,17(3):65-69. [12] 沈蔚,李京,陈云浩,等.基于LIDAR数据的建筑物轮廓线提取及规则化算法研究[J].遥感学报,2008,12(5):692-698.

3.2 基于高程纹理的建筑物点云过滤

3.3 高程密度分割

3.4 基于深度影像的建筑物边缘提取

3.5 基于管子算法提取轮廓边界

3.6 矩形外接圆法轮廓线规则化

4 实验误差分析

5 结束语