列车司机驾驶仿真子系统的设计与实现
2014-08-01李骁宇李开成李玉兰陈思捷刘木齐
李骁宇,李开成,李玉兰,陈思捷,刘木齐
(1.北京交通大学 电子信息工程学院,北京 100044;2.北京交通大 学轨道交通运行控制系统国家工程研究中心,北京 100044)
列车司机驾驶仿真子系统的设计与实现
李骁宇1,李开成2,李玉兰1,陈思捷1,刘木齐1
(1.北京交通大学 电子信息工程学院,北京 100044;2.北京交通大 学轨道交通运行控制系统国家工程研究中心,北京 100044)
列车司机驾驶仿真子系统是构建完备的列控仿真系统与功能测试环境的基础部分,该子系统有助于提高整个仿真与测试系统的真实性和可操作性。本文针对司机驾驶仿真子系统,从功能需求、列车速度模型建立、软件仿真等方面对该子系统进行分析,引入AV8R-01型摇杆及SST辅助编程技术,利用Visual Studio 2010编程环境实现了该子系统。本文利用较低成本的硬件平台辅以软件界面代替传统的驾驶实物平台,在CTCS仿真测试与司机培训等仿真平台搭建过程中既节省了成本,又能够起到驾驶仿真的作用。
驾驶仿真;列车控制系统;摇杆编程;运行曲线
列车控制(以下简称:列控)仿真系统分为多个子系统,其中司机驾驶仿真子系统有助于提高仿真系统的真实性和可操作性,加深使用人员对列控系统的直观理解。本文针对面向培训的仿真列控系统,构建能模拟动车组列车驾驶台操控设备的驾驶仿真子系统,并通过直观的仿真界面和相关曲线展示整个操作过程。
1 驾驶仿真子系统
驾驶仿真子系统是构建完备的列控仿真系统与功能测试环境的基础部分。
在真实设备中,司机驾驶系统与列控系统的结构关系如图1所示。
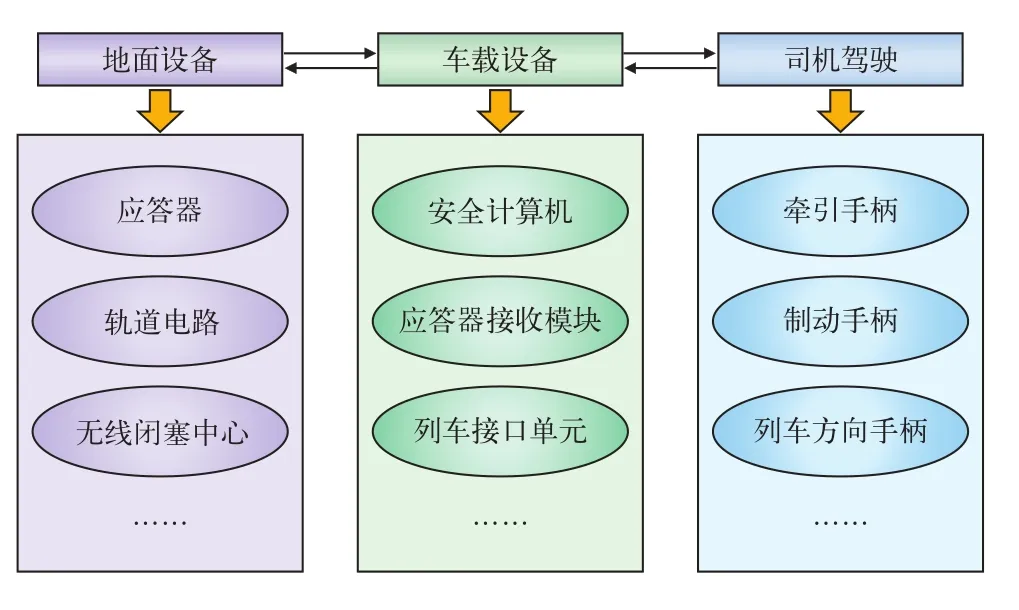
图1 司机驾驶系统与列控系统结构关系图
司机驾驶系统通过列车接口单元与列控车载系统通信并控制列车运行。车载设备通过应答器天线、轨道电路接收单元、GSM-R车载电台分别接收来自地面应答器、轨道电路、无线闭塞中心的信息。安全计算机根据获得的地面信息,建立静态速度曲线,计算动态速度曲线,通过人机界面告知司机,同时,通过列车接口监督列车运行。
司机驾驶仿真子系统向车载设备提供驾驶台激活、前进、后退、零位、制动、牵引等司机操作状态,完成对列车驾驶台激活与关闭、完成列车的牵引与制动、完成过分相模拟操作等功能。
在现有仿真系统中,司机驾驶通常缺少能够模拟司机驾驶台操作的真实列车操作台设备,因此,对于许多铁路相关院校和铁路局培训部门,如何以较低成本实现司机驾驶仿真子系统是一个急待解决的问题。
2 司机驾驶仿真子系统的设计
2.1 功能描述
司机驾驶仿真子系统的主要功能是模拟车内设备,让司机能够在接近真实的环境中进行列车驾驶培训和学习。
2.2 功能设计
该仿真子系统的功能设计如图2所示。

图2 司机仿真驾驶子系统功能设计图
2.2.1 硬件平台设计
司机驾驶仿真的硬件平台设计部分是使用至少一个手柄和多个按钮,同时能和计算机进行通信的输入设备。由控制手柄完成列车牵引和制动功能,由按钮完成激活关闭驾驶台、列车方向切换、ATP冗余切换、ATP隔离运行切换、升弓降弓、DMI切换、主断路器开合等功能。
根据司机驾驶功能的需求,实验室采购了AV8R-01摇杆设备。该摇杆与计算机的接口是通用性较好的USB2.0接口,并且有1个3D旋转控制的方向手柄、1个快速响应扳机、1个带按钮保护的灯光按钮、双油门调节器、4个双向开关、8个方向视角苦力帽、三档模式开关。
AV8R-01支持SST辅助编程技术软件。通过SST软件编程可以模拟键盘按键、鼠标按键,可以将复杂的摇杆操作映射到键盘和鼠标事件上,例如:用户按下硬件上“按钮T1”,经SST软件设计,可以让计算机收到键盘事件“Ctrl+Shift+Z”,这样在编程实现处理硬件输入时,开发者只需要处理该键盘事件,就能采集到摇杆的输入信息。这种技术使用方便,可以缩短了司机驾驶模拟器的开发周期。同时,SST编程的结果可由配置文件导入,在新环境下使用不需要重复编程,有较好的兼容性。仿真硬件连接图如图3所示。
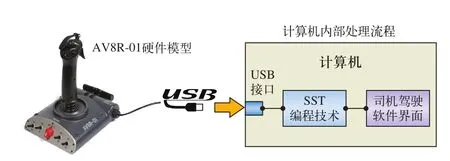
图3司机驾驶仿真硬件连接图
2.2.2 软件仿真设计
司机驾驶仿真的软件仿真设计部分是设计一个司机驾驶台的图形界面软件,该软件能够接收来自硬件平台的输出信息,并显示相应信息。软件通过对列车运行速度、位置关系建模,生成列车运行曲线。为了方便拓展列车的其他仿真子系统,软件通过通信接口的预留,使该设计能够与其它外部仿真程序兼容。司机驾驶仿真软件流程如图4所示。
列车运行曲线仿真需要计算出每一时刻的列车位置和速度,列车受力分析关键算法如下:
用F表示列车的牵引力,W表示列车运行阻力,B表示列车制动力。列车合力C为:

F的取值根据动车组牵引特性曲线,对牵引力进行线性插值运算由式2得到。

Fx是速度vx下的估计牵引力;F1、F2分别表示牵引特性曲线中vx相邻的前后两点速度v1、v2对应的牵引力。
阻力计算包括基本阻力、坡度阻力、曲线阻力、隧道阻力。其中基本阻力是阻力的主要来源,它的大小与列车重量成正比。比例系数w0与速度v有关,如式3。

a、b、c的取值与列车型号和类型有关。
制动力B的计算与牵引力计算原理相同,由制动特性曲线进行线性插值计算得到,如式4。

Bx是速度Bx下的估计制动力;B1、B2分别表示制动特性曲线中vx相邻的前后两点速度v1、v2对应的制动力。
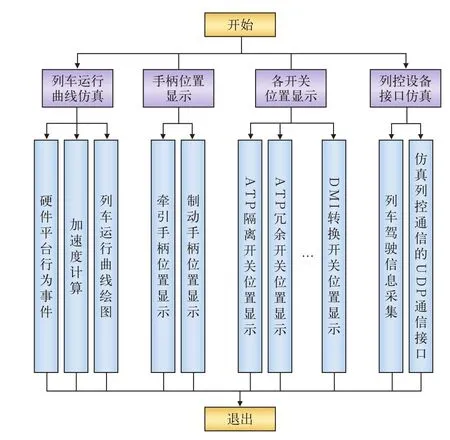
图4 司机驾驶仿真软件流程图
3 司机驾驶仿真子系统的实现
利用SST辅助编程技术,将司机驾驶仿真子系统的硬件平台与软件仿真紧密地联系起来。但是在系统实现的过程中,也因为SST技术的使用带来了一些问题,以下探讨两个主要的问题。
3.1 模拟按键冲突
由于使用了SST编程的模拟键盘按键功能,那么实现过程中就需要考虑模拟按键与系统快捷键的冲突问题。
(1)系统在运行过程中,可能会有人为的键盘操作。为了让软件仿真程序能够判断键盘事件是否来自摇杆,降低键盘操作对系统运行过程的影响,模拟的按键使用的是功能键(如:Ctrl、Alt、Shift)与字母键或数字键的组合。
(2)在组合按键设置时,还需考虑Windows系统中的快捷键冲突问题。如:Ctrl+Shift默认的是切换输入法、Ctrl与许多字母的组合也是默认快捷键。
为解决这个问题,可以通过输入法设置,屏蔽Ctrl+Shift的快捷键功能,这样给制定摇杆的按键映射关系提供了很大空间。在避免快捷键冲突的基础上,制定的模拟按键功能如表1所示。
3.2 档间切换阶跃
在实际列控设备从司机驾驶台的制动、牵引手柄上采集到的是连续变化模拟数据。而在现有的仿真子系统中,牵引杆和制动杆发送给软件仿真程序的却是不连续的数字量,即牵引、制动的档位信息。这就造成了模拟牵引(或制动)档间切换功能时输出的阶跃失真问题。
假设1:司机进行换挡操作,是一个平稳匀速切换的过程,两档之间切换时间τ是Tsh附近的数;
假设2:各挡之间的牵引力(制动力)之差,即Fn+1–Fn都相同,用牵引力(制动力)等级代替实际牵引力(制动力)数值。
已知使用SST技术编程时,摇杆的挡位判断阈值点位于两挡的中点处,这样司机在匀速换挡过程中,仿真系统将有τ/2时长的超前响应。
以上假设成立的前提下,使用MATLAB软件对现有仿真系统的牵引力输出等级和输入摇杆档位随时间的变化曲线进行对比,得到图5。在理想状态下,牵引力输出等级应该是与档位完全一致的,可是从图5中看到,牵引力输出等级在前后两个档位之间重点处出现了明显的阶跃失真现象。
为解决牵引力输出过程阶跃的问题,对摇杆输入进行实时处理,将牵引力阶跃响应转换成斜坡响应,从而改善系统的真实性。以牵引力控制为例,控制斜坡响应的斜率为,理想状态下档位切换时间τ恰好为Tsh,响应系统效果是一个短时的延迟,如图6所示。
若司机档位切换较慢时,在实际牵引力等于挡位的目标牵引力之后,保持牵引力不变,直至档位发生变化,如图7所示。
若司机档位切换较快,在实际牵引力不等于挡位的目标牵引力时档位发生变化,重新计算斜坡斜率为,直至档位再一次发生变化,如图8所示。
通过以上4种情况对比分析,可以看出本文提出的阶跃过程转换成斜坡的实时处理方法可以适应不同的司机换挡速度,并在一定条件下有效地克服响应阶跃失真的问题。
在有效地解决SST编程带来的几个问题的基础上,利用Visual Studio 2010编程环境,在软件仿真中对驾驶台进行平面模型构造,并在驾驶台上方根据列车运动模型绘制列车运行曲线能准确反馈列车运行状态、位置和速度情况。

表1 模拟按键功能表
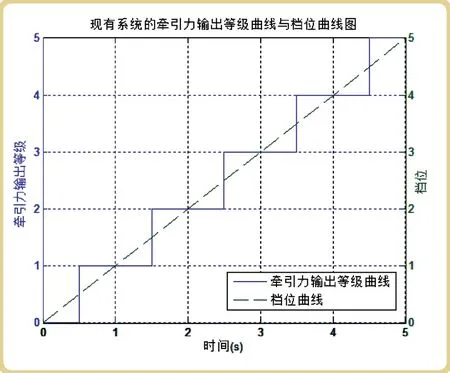
图5 现有系统的牵引力等级曲线与档位曲线图

图6 数据处理后τ=Tsh的牵引力等级曲线与档位曲线图
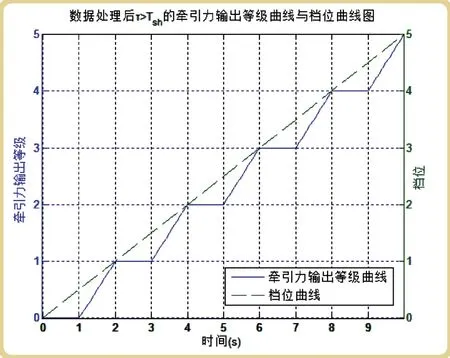
图7 数据处理后τ>Tsh的牵引力等级曲线与档位曲线图
将列车驾驶仿真子系统应用于CTCS-3仿真系统中,从司机驾驶的角度能更好地模拟实际操作。
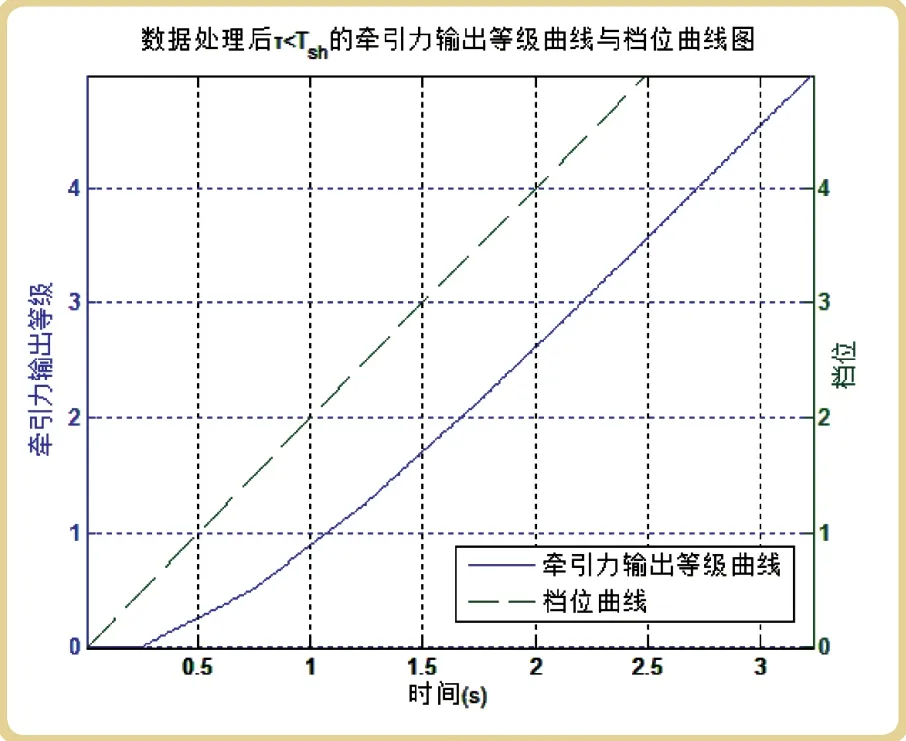
图8 数据处理后τ 利用低成本的硬件平台与计算机软件界面相结合的仿真技术构建的列车司机驾驶仿真子系统,能够在实验室中对列车的运行驾驶进行仿真测试,也能在司机驾驶培训中提高驾驶过程的真实感受。整个仿真过程安全、可靠、可重复、易实现并且易普及,能够在一定程度上代替实物仿真。 [1]黄卫中,季学胜,刘 岭,等. CTCS-3级列控车载设备高速适应性关键技术[J]. 中国铁道科学,2010,31(3):87-92. [2]姜 璐,宁 滨. 列车三维驾驶仿真系统的设计与实现[J].铁道通信信号,2008,44(9): 37-40. [3]陈慧民. 高速动车组牵引特性分析[J]. 城市轨道交通研究,2008(7):2l-4. [4]彭俊彬. 动车组牵引与制动[M]. 北京:中国铁道出版社,2007. [5]薛丽萍. CTCS-3 级列控系统仿真测试平台-多车仿真子 系统的研究[D]. 北京:北京交通大学,2009. 责任编辑 杨利明 Train Driving Simulation Subsystem LI Xiaoyu1, LI Kaicheng2, LI Yulan1, CHEN Sijie1, LIU Muqi1 The Train Driving Simulation Subsystem was the basic part to build a complete simulation of the Train Control System and functional test environment. This Subsystem could help to improve the whole simulation and testing system of authenticity and operability. In this paper, depending on the Train Driving Simulation Subsystem, from the functional requirements, train speed model and the software simulation of the Subsystem were analyzed. The AV8R-01 handle rocker and SST programming techniques were introduced. The Subsystem was implemented based on the Visual Studio 2010. The paper used low cost hardware platform with software interface instead of the traditional driving physical platform, saved the costs in building process of the CTCS simulation test and driver training simulation platform, played the role of driving simulation. driving simulation; Train Control System; rocker programming; operation curve U268.4∶TP39 A 1005-8451(2014)07-0016-05 2014-01-13 北京高等学校青年英才计划项目(YETP0580)。 李骁宇,在读硕士研究生;李开成,副教授。4 结束语
( 1. School of Electronics and Information Engineering, Beijing Jiaotong University, Beijing 100044, China; 2. National Engineering Research Center of Rail Transportation Operation and Control System, Beijing Jiaotong University, Beijing 100044, China )
