天津地铁2号线列车ATO模式下精确停车的实现
2014-07-27刘洋
刘 洋
(天津地铁运营有限公司,助理工程师,天津 300222)
近年来,我国城市轨道交通技术飞速发展,由于城市轨道交通具有快速、准时、安全、舒适的特点,很多大中型城市已经建立了多条城市轨道交通线路〔1〕。随着CBTC(Communication Based Train Control System,基于无线通信的列车自动控制系统)技术广泛运用于城市轨道交通系统中,很多城市的城轨列车都以ATO(Automatic Train Operation,列车自动驾驶)模式运行,以降低司机的工作强度,保证列车高效运行〔2〕。
然而在实际的运行过程中,由于列车以ATO模式运行,司机并不参与进站停车的操作,所以ATO系统需要自动控制列车在进站时准确地停靠在站台旁,使乘客能够顺利上下车〔3〕。由于目前城轨的列车运营密度较大,如果列车进站停车位置不精确,会直接影响到列车的准点运行。而且在有屏蔽门的车站,列车停车位置不准确,会导致列车与车站屏蔽门不能精确对位,影响乘客顺利上下车〔4,5〕。
本文根据目前天津地铁二号线的系统工作原理以及列车实际运行状况,针对列车ATO模式如何实现进站精确停车问题进行探讨,并对列车未精确停车故障进行分析并提出解决方案。
1 ATO系统的停车控制原理
车站精确停车功能是信号ATO子系统的一项重要功能,实现这一功能需要的控制过程为:
1)列 车 通 过 VATP(Vehicle Automatic Train Protection,车载列车自动防护系统)设备来测量列车的行驶速度。在列车行驶过程中,安装在车轴上的测速电机和安装在列车底部的多普勒雷达,均可以用来测量列车行驶的速度,保证速度测量的准确性。
2)列车通过安装在列车底部的信标读取器读取设置在沿线区间中轨旁信标的信息来完成列车的精确定位功能。信标是一种包含有“位置数据”的装置,其工作频率是2.4 GHz,向VATC(Vehicle Automatic Train Control,车载列车自动控制系统)提供区域ID、列车区段位移等信息。
3)VATP的线路数据库中拥有各地面信标的位置,根据信标的信息,VATP能知道列车在线路上的位置,并与测速系统一起实现列车的精确定位。然后将信息通过TWC(Train to Wayside,轨旁通信)子系统向 RATP(Region Automatic Train Protection,区域列车自动防护系统)发送位置报告。RATO(Region Automatic Train Operation,区域列车自动运行系统)通过RATP间接地接收来自列车的信息,当列车沿路线行驶时,不断读取信标,定期更新并报告其位置的信息。
4)RATO 向 VATO(Vehicle Automatic Train Operation,区域列车自动运行系统)发送列车的进路和目的地等信息。VATO确定列车的当前位置、速度和列车的目标停靠位置之间的距离,使用这一距离来编制车站停车减速曲线。车站停车曲线见图1所示。

图1 车站停车曲线示意图
2 影响停车精度的主要因素
在进站停车阶段,影响列车精确停车的因素有很多,如电空制动的切换速度,列车制动的参数等等。而在信号系统本身,主要影响列车停车精度的因素有以下3个方面。
2.1 列车速度测量的精确性 精确地测量出列车的瞬时速度和加速度,是提高站停精度的一个重要的因素。由于车载信号系统主要根据列车的运行速度和加速度来确定牵引或制动的选择,并绘制列车运行曲线,所以就需要运用测速电机和多普勒雷达准确地测量出列车的速度,保证列车运行曲线的准确性,从而保证列车的站停精度达到标准。
2.2 列车位置定位的精确性 列车位置定位的精确性是影响站停精度的第二个重要因素。如果不能对列车目前的位置进行精确定位,是无法通过算法预估出列车的停车位置的,而列车定位是依靠轨旁信标和车载信标读取器共同完成的,所以信标的布置密度、信标中数据的正确性以及信标读取器的可靠性便成了列车定位的关键点。
2.3 车载ATO系统软件的算法 即使列车的速度和定位都足够准确,如果软件算法不当,会导致绘制的运行曲线不够精确,也不能保证列车停车的精确性。因此车载ATO系统软件的算法是否科学是另一个影响站停精度的因素,
3 ATO站台精确停车的实现
根据以上所述的ATO系统的停车控制原理及影响列车进站停车精度的因素分析,需要通过以下3个方面的设计,使天津地铁2号线列车满足车站停车精度在±0.3 m范围内99.995%概率,±0.5 m范围内99.999 8%概率的要求。
3.1 提高测量列车速度的准确性 在列车进站停车的过程中,由于列车会进入制动工况,而制动时会造成列车车轮的打滑和空转,导致测速电机测出的列车速度误差很大。为此在实际设计过程中,使VATC设备能在列车运行过程中,将采集到的测速电机输入的速度数据与多普勒雷达输入的速度数据不断相互比较,当这2个组件测得的速度数据差距超过了允许的差异范围时,VATC会自行判断车辆处于滑动或空转的状态并会屏蔽掉测速电机的数据,默认多普勒雷达测得的数据正确。这样,就可以保证系统能够采集到准确的列车速度信息,并通过算法绘制出更精确的速度曲线。
3.2 提高列车定位的准确性 由于列车定位是靠列车读取沿线信标的信息来完成对位置的确定的,所以在实际设计过程中,主要通过2个方面来提高列车定位的准确性:一是提高信标内写入数据的准确性,以帮助列车更精确的定位,使VATC可以绘制更准确的停车曲线;二是在所有车站的接近区段以更高的密度设置信标,有助于修正停车距离的误差,完成精确停车的目标。
3.3 改进软件算法 在软件设计中,ATO通过确定目标巡航速度来确定控制算法。最初将目标巡航速度设置到一个偏移值(正常是3~5km/h),该值低于ATP强制执行的保证乘坐质量的限速。该偏移值提供了防止列车超速的缓冲,可以通过调整该偏移值来达到要求的运行间隔。当列车以更低的保证乘坐质量的限速进入线路区段时,在距离前方区段足够远的地点,目标巡航速度降低到低于下一个保证乘坐质量限速的偏移值,以此来控制列车的速度,并且在列车到达下一区段之前,将列车速度减速到下一目标速度。也可以根据超出情况的紧急制动曲线调整该距离,防止出现超速情况。
每当目标巡航速度变更时,控制算法按照程序控制的加速度和冲击率,向上(加速)或向下(减速)调节速度,直至控制速度到达目标巡航速度为止。
当列车进入计划停车站时,便将控制速度合并到停车曲线中。列车在进站停车过程中的速度、加速度与距离的曲线关系见图2所示。
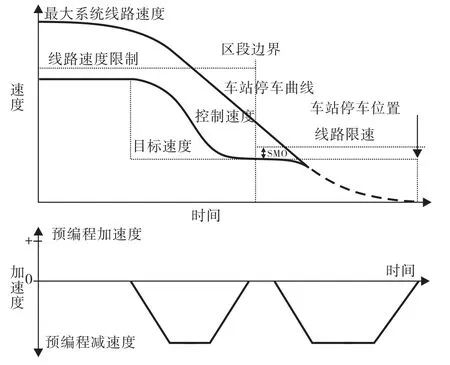
图2 车站停车速度、加速度与位置的关系曲线图
4 结束语
地铁ATO模式站台精确停车一直是国内外信号系统中重要的一环,是关乎地铁安全运营的一个重点环节。本文介绍了地铁ATO模式站台停车的控制过程和影响精确停车的因素,给出了天津地铁2号线实现精确停车的方法。实验证明,通过这3方面的设计,并经过正线的调试和实验,测试结果满足设计要求,可以保证站停精度在标准之内,从而确保了列车运行的安全性和可靠性。
〔1〕王鹏飞,樊贵新,王新海等.城轨车辆在ATO模式下停车精度问题的分析与探讨〔J〕.铁道机车车辆,2011,31(6):77-79,87.
〔2〕王道敏.ATO站台精确停车功能实现的制约因素分析〔J〕.城轨交通,2012,9(4):41-43,61.
〔3〕黎晓东.地铁列车精确停车技术的应用〔J〕.交通电气,2005,24(9):101-103
〔4〕禹宏鹏.城轨列车停车位置不精确的原因及对策〔J〕.城市轨道交通研究,2008,(9):28-30.
〔5〕唐涛,黄良骥.列车自动驾驶系统控制算法综述〔J〕.铁道学报,2003,25(2):98-102.
