机器人磨削个性化人工髋关节柄的方法与实验
2014-07-26陈英雄朱建非朱鸿巍席文明
陈英雄,朱建非,吴 琪,朱鸿巍,席文明*
(1.厦门大学物理与机电工程学院,福建 厦门361005;2.中国人民解放军第82医院,江苏 淮安223001)
在人工髋关节置换中,人工髋关节的关节柄与髓腔表面的贴合度决定着髋关节置换是否成功,高的贴合度有利于人工髋关节的初期稳定,延长髋关节置换的寿命[1-2].人体髋关节髓腔具有S型形状,其每个人的髓腔断面形状并不相同,当现有标准型直柄人工髋关节与S型髓腔匹配时会形成三点接触,降低了人工髋关节与髓腔的贴合度,形成应力遮蔽.德国LINK公司研制的解剖型人工髋关节Ribbed具有S型形状,提高了其与髓腔的贴合度,取得了好的置换效果[3-4].国内的个性化髋关节置换主要针对肿瘤和髋关节发育异常的病人,其与正常病人的个性化髋关节设计有很大区别[5-7].要获得人工髋关节与髓腔的完全贴合,需要利用病人的髓腔数据设计个性化的人工髋关节,其最优的方法是利用病人的CT数据进行个性化髋关节设计[8-11].设计完的个性化髋关节主要利用五轴加工中心进行铣削加工[12-14].由于个性化人工髋关节的复杂外形,在加工过程中需要对其进行多次装夹,增加了工艺复杂性,降低了加工精度.
本文利用机器人磨削技术加工个性化人工髋关节的关节柄,希望获得一种速度快、效率高、成本低的个性化关节制造方法,为个性化髋关节的磨削和抛光一体化建立基础.
1 机器人磨削个性化关节柄方法
图1为直柄与解剖型人工髋关节的比较,图1(a)、(b)是病人关节置换后的侧位X射线图,由于髋关节髓腔具有S型形状,图1(a)中的直柄人工髋关节与髓腔表面形成三点接触,而图1(b)的解剖型关节具有S型外形,可以很好地与髓腔贴合.图1(c)、(d)为尸体骨实验,验证了直柄人工髋关节与髓腔的三点接触,而Ribbed人工髋关节与髓腔有好的贴合度.

图1 直柄与解剖型人工髋关节比较Fig.2 The comparation between the straight shank and anatomical artificial hip joint
图2是机器人磨削个性化人工髋关节柄的方法.将病人的CT数据导入到Mimics软件中进行股骨三维重建(图2(a),获得病人三维髓腔实体模型(图2(b)),将三维髓腔实体模型导入Pro/E软件中,进行三维髓腔实体模型表面细化和平滑(图2(c)).
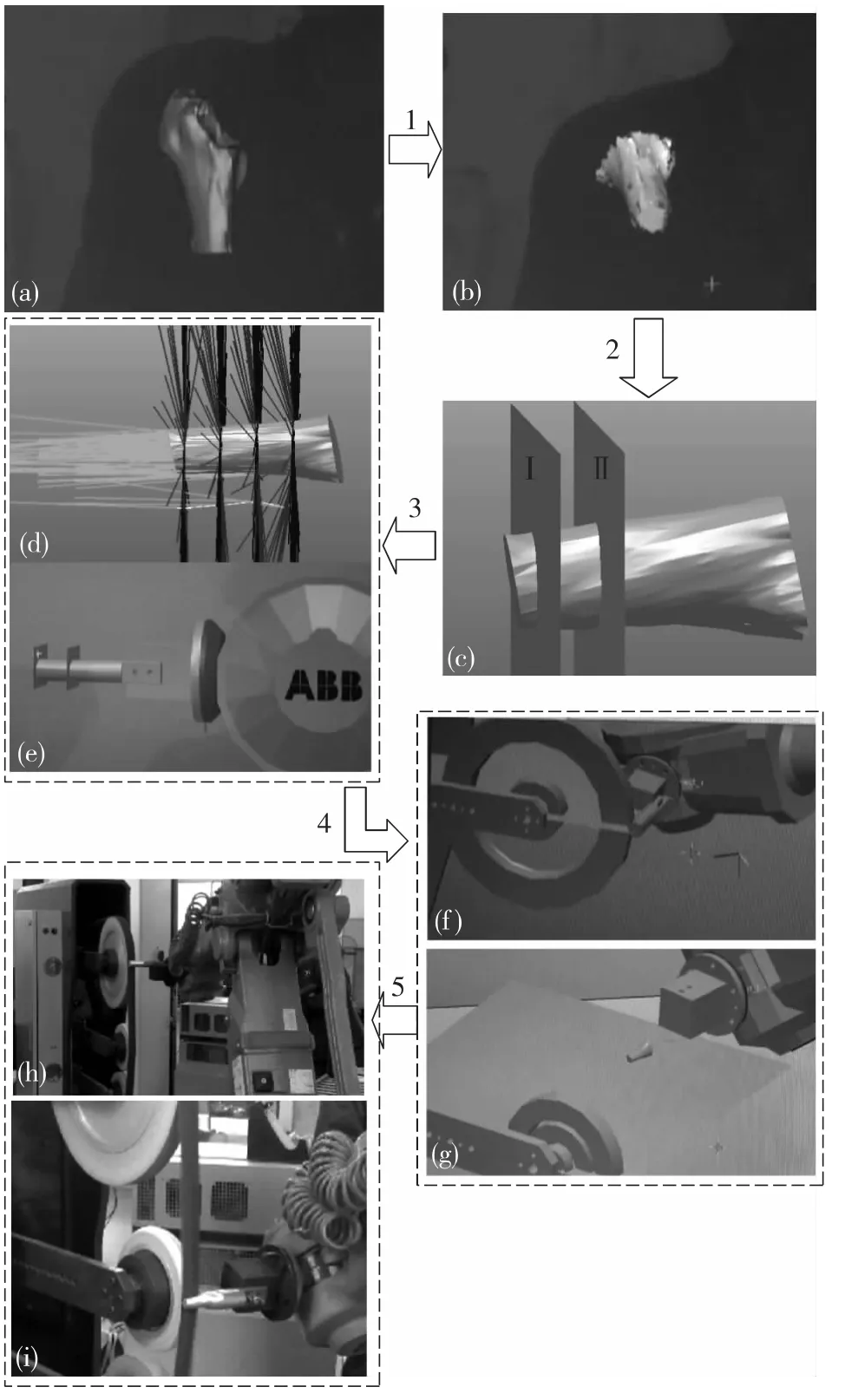
图2 机器人磨削个性化人工髋关节柄的方法Fig.2 The method for individualized artificial hip joint handle of robot grinding
将处理后的三维髓腔实体模型导入到机器人仿真软件中.在髓腔实体模型上取4个断面,相邻断面之间的距离为10mm,在每个断面的圆周上编制轨迹点.机器人磨削轨迹为沿每个断面旋转一周,共旋转4周(图2(d),三维髓腔实体将复制在圆柱铜棒上,从图2(e)可以看出,三维髓腔实体模型需要包容在三维铜棒实体模型内.机器人磨削的轨迹点是建立在三维髓腔实体模型上的,只要控制好磨削时的进给量,就可以在铜棒上加工出三维髓腔实体.在磨削余量大于0.5 mm时,铜棒进给量为0.3mm;而当磨削余量小于0.5mm时,铜棒进给量为0.1mm.
完成机器人磨削轨迹编制后,在机器人仿真软件上进行模拟磨削仿真,观察机器人的位形是否奇异,是否和磨削机床发生干涉,如存在上述问题,则修改磨削轨迹点的位姿,直至满足要求,见图2(f)、(g)所示.
机器人磨削系统的标定是保证磨削精度的关键,本文利用力传感器标定机器人磨削系统.利用力传感探针接触磨削机床的磨削轮上3点,利用机器人正运动学建立机器人与磨削机床的坐标转换关系.调整仿真软件中的机器人模型与磨削机床模型之间的位置和姿态关系,使其和实际的机器人与磨削机床的位置和姿态关系一致.利用力传感器可以有效提高标定精度,本文中的位置标定精度为0.16mm,姿态标定精度为0.1°.
完成磨削系统标定后,将仿真好的磨削程序下载到自行研制的机器人磨削系统中,对铜棒采用80号砂带磨削.由于铜棒直径为30mm,而三维髓腔实体的最小外接圆直径为13.5mm,所以铜棒首先在磨削机床的上轮上磨削,上轮为圆柱形轮子,1次可以磨削较宽的范围,2次可以磨削45mm的宽度(图2(h)).当铜棒一端外接圆直径接近14mm时,在中间轮上进行磨削,中间轮外表面带有一定的弧度,便于磨削复杂的三维髓腔实体(图2(i)).
完成髓腔实体磨削后,利用测量探针对磨削的髓腔实体断面尺寸进行测量.
2 实验结果
在机器人磨削三维髓腔时,形成了一个回转轴,该回转轴也存在于机器人磨削系统的仿真软件中.在软件中,可以直接获得该回转轴与铜棒模型轴线的位置关系,而仿真软件中的三维髓腔实体模型回转轴与铜棒模型轴线的位置关系与实际的三维髓腔实体回转轴与铜棒轴线的位置关系是一致的,所以,利用实际铜棒的外轮廓以及机器人的精确移动,就可以确定实际三维髓腔实体的回转轴.然后利用一维测量探针检测三维髓腔实体断面的尺寸,见图3所示.
让测量探针的尖顶处于三维髓腔实体的回转轴上,利用机器人沿垂直方向移动三维髓腔实体,使测量探针处于三维髓腔实体的正下方.利用机器人沿前后方向移动三维髓腔实体,使测量探针尖顶处于需要测量的第1个断面上,手动上移测量探针与三位髓腔实体接触,测量第1点,让机器人绕三维髓腔实体回转轴每次旋转5°,测量其他点.
图3中的一维测量探针精度为0.01mm,利用该测量探针共测量2个断面,每个断面上测量72个点.图3中测量的2个断面与图2(c)的2个断面对应,图3中的2个断面为人工髋关节柄的实际加工尺寸,而图2(c)中的2个断面为人工髋关节柄的理论值,通过比较实际加工尺寸和理论值,就可以确定机器人磨削人工髋关节柄的精度.其中,理论值直接从三维髓腔实体的Pro/E模型断面上得到,见图2(c)所示.图4(a)是断面Ⅰ实际加工尺寸与理论值的比较,其误差绘制在图4(b)中,实际加工尺寸与理论值的平均误差为0.290 5mm,最大误差为0.624 8mm,最小误差为-0.038 3mm,方差为0.025.图4(c)是断面Ⅱ实际加工尺寸与理论值的比较,其误差绘制在图4(d)中,实际加工尺寸与理论值的平均误差为0.253 6mm,最大误差为0.571 5mm,最小误差为-0.014 4mm,方差为0.019 6.

图3 髓腔断面测量系统Fig.3 The system for measuring medullary cavity profile
对照图4(a)和图4(c)发现,2个断面产生大约6°的扭转,同时,图4(a)的断面外接椭圆的长短径之比为1.3,而图4(c)的断面外接椭圆的长短径之比为1.2,说明关节髓腔断面不仅有扭转,其不同位置的断面形状也发生缓慢的变化.
根据文献[15],医生置换直柄人工髋关节时,其关节表面与髓腔表面的误差为1~5mm左右,其贴合度一般为28%~30%.当人工髋关节表面与髓腔表面的误差小于1mm时,认为人工髋关节与髓腔贴合.虽然关节髓腔具有复杂的非规则形状,从实验数据可以看出,人工髋关节柄的实际加工尺寸与三维髓腔实体间的误差小于1mm,机器人可以磨削复杂的人工髋关节的关节柄.
3 结 论

图4 2个断面的测量值与理论值的比较Fig.4 The comparation of measured value and theoretical value in the two sections
本文利用机器人磨削系统加工个性化人工髋关节的关节柄,其目的是希望发展一种新的个性化人工髋关节加工方法,满足人工髋关节与髓腔高度贴合的要求.虽然本文的磨削方法是针对人工髋关节进行磨削,实际上也可以用于其他人体关节的个性化加工.为提高磨削的关节柄与病人髓腔的贴合度,直接利用病人CT数据产生人工髋关节柄的设计模型,然后,利用机器人磨削该人工髋关节柄.通过对实验结果的分析,验证了此方法的有效性.后期,将利用机器人替代人工直接对磨削的关节柄进行抛光加工,建立个性化人工髋关节柄磨削和抛光一体化方法.
[1]Benum P,Aamodt A.Uncemented custom femoral components in hip arthroplasty,aprospective clinical study of 191hips followed for at least 7years[J].Acta Orthopaedica,2010,81(4):427-435.
[2]Hananouchi T,Sugano N,Nishii T,et al.Effect of robotic milling on peripeosthetic bone remodeling[J].Journal of Orthopaedic Research,2007,25(8):1062-1069.
[3]雷光华,曾凯斌,李康华,等.解剖型非骨水泥全髋人工关节置换术近中期疗效研究[J].中国修复重建外科杂志,2007,21(3):244-246.
[4]王敏,张峡,郝勇,等.解剖型股骨柄假体植入并发股骨近段骨折与股骨近段髓腔解剖分析[J].第三军医大学学报,2011,33(14):1522-1525.
[5]Ma R Y,Xue W D,Wang D M,et al.Design and manufacture of custom hip prostheses based on standard X-ray film[J].International Joural Advance Manufacture Technology,2005,27:70-74.
[6]吴峻松,凌玲,王成焘.定做式人工髋关节设计与加工中股骨轮廓提取方法[J].机械设计与研究,1998,4:53-54.
[7]姜涛,刘建国.定制式人工全髋假体设计制造及临床应用[J].生物医学工程学杂志,2005,22(2):392-395.
[8]Zhu J W,Liu F,Dong Q R,et al.Computer-assisted design of individualized femoral prosthesis according to 3Dreconstruction of CT images[J].Journal of Clinical Rehabilitative Tissue Engineering Research,2010,14(35):6639-6642.
[9]Rahmati S,Farahmand F,Abbaszadeh F.Application of rapid prototyping for development of custom-made orthopedics prostheses:an investigative study[J].Journal of Mechanical Engineering,2010,3(2):11-16.
[10]Hananouchi T,Saito M,Koyama T,et al.Tailor-made surgical guide based on rapid prototyping technique for cup insertion in total hip arthroplasty[J].The International Journal of Medical Robotics and Computer Assisted Surgery,2009,5:164-169.
[11]谭瑞昌,范红松,吴方,等.齿槽型人工髋关节骨应力分布的三维有限元分析[J].生物医学工程学杂志,2011,28(4):732-736.
[12]Lee J N,Chang K Y.An integrated investigation of CAD/CAM for the development of custom-made femoral stem[J].Life Science Journal,2009,7(1):56-61.
[13]Rawal B R,Ribeiro R,Malhotra R,et al.Design and manufacturing of femoral stem for the indian population[J].Jounal of Manufacturing Processes,2012,14:216-223.
[14]Werner A,Lechniak Z,Skalski K,et al.Design and manufacture of anatomical hip joint endoprostheses using CAD/CAM systems[J].Journal of Materials Processing Technology,2000,107:181-186.
[15]Paul H A,Mittlestadt B,Bargar W L,et al.A surgical robot for total hip replacement surgery[C]∥Proceedings of the 1992IEEE International Conference on Robotics and Automation.Nice,France:IEEE,1992:606-611.