低空无人机航摄系统在正射影像制作中的应用
2014-07-25魏涌毕凯
魏 涌 毕 凯
(1.中铁工程设计咨询集团有限公司,北京 100055; 2.国家基础地理信息中心,北京 100830)
低空无人机航摄系统在正射影像制作中的应用
魏 涌1毕 凯2
(1.中铁工程设计咨询集团有限公司,北京 100055; 2.国家基础地理信息中心,北京 100830)
介绍应用低空无人机航摄系统进行城市数字正射影像制作的流程和方法,研究航空摄影、像控测量及DOM制作等方面的技术特点。
低空无人机 航空摄影 影像处理 正射影像
随着电子技术的飞速发展,低空无人机在远程遥控、续航时间、飞行品质上有了明显的突破,成为近几年兴起的新的航空遥感手段。相对于传统遥感数据和影像获取手段而言,低空无人机航摄技术具有体积小巧、机动灵活、高效快速、精细准确等优点,使得该系统在小区域测绘方面具有独特的优势,研究利用无人机获取的航空影像进行正射影像制作,对于困难地区影像获取、铁路三维空间选线、数字城市建设方面具有重要的现实意义。
1 低空无人机飞行系统组成
低空无人机飞行系统由无人机飞行平台、传感器、飞控系统、地面监控系统以及地面保障系统五部分组成。
飞行平台由机体、操控系统、通讯系统和动力系统组成。传感器为经过精确检校后的小型数码相机。飞控系统由机载GPS、惯导系统、气压传感器和飞行控制系统等部件组成,可以实现无人机按设计航线自主飞行。地面监控系统包括地面工作站、监控软件系统、通讯系统和维护系统。地面保障系统主要由运输车和后勤安全保障车组成。
2 无人机航空摄影技术
2.1 航空摄影
无人机航摄系统一般执行小区域的数码航摄,在航线设计时无需考虑地球曲率变化,可依照GOOGLE EARTH三维系统,根据摄区最高点和最低点高程,求取摄区基准面高程,绝对航高的计算公式为
无人机数码航摄一般不需要进行摄影分区,只需按摄区的4个角点进行航线设计。但是铁路航摄范围一般沿设计线路走向呈带状分布,如简单的按照四个角点进行航线设计,会造成很大的浪费,应根据成图需要确定摄影边界,划定摄影分区,对每个分区单独进行航线设计(如图1所示)。

图1 摄影分区示意
航线设计完成后,需要对初步设计情况进行检查,主要检查内容包含摄区高差与设计航高的关系、摄区最低点的地面分辨率和最高点的重叠度。每个摄区高差应小于1/4航高,摄区最高点重叠度(即摄区最小重叠度)和最低处地面分辨率的计算公式为
摄区最小地面分辨率=

单像元大小=地面分辨率×
摄区最高点重叠度=
全部检查工作完成后即可开展航空摄影,获取数字影像数据。
2.2 像控点布设
无人机航摄系统的像控测量工作在总体实施流程、基础控制点测量、像片控制点测量的刺点与整饰、点之记的制作等方面与传统航空摄影一致。但在区域网布点方案上与传统航摄有一定的差别。
区域网的划分依据成图比例尺、地面分辨率、测区地形特点、摄区的实际划分、图幅分布等情况全面考虑,根据具体情况选择最优实施方案。区域网的大小和像控点之间的跨度以能够满足空中三角测量精度要求为原则,主要依据成图精度、航摄资料的有关参数及对系统误差的处理等多因素确定。
无人机像幅小、基线短、像对多,区域网布点参照以下方案,即航向相邻平面控制点间隔基线数参照如下估算
(1)
(2)
式中ms——连接点(空三加密点)的平面中误差/mm;
mh——连接点(空三加密点)的高程中误差/m;
K——像片放大成图的倍数;
H——相对航高/m;
b——像片基线长度/mm;
mq——视差量测的单位权中误差/mm;
n——航线方向相邻平高控制点的间隔基线数。
公式中所涉及的参数由所采用相机、地面分辨率、成图比例尺等参数确定。
旁向相邻平面控制点的航线跨度应不超过表1的规定。
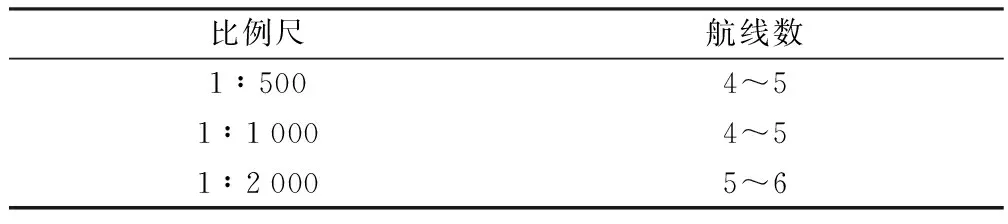
表1 旁向相邻平面控制点的航线跨度
无人机航摄获取的影像相幅小、相片数多,应进行快速拼图,利用简单镶嵌的摄区影像图查看摄区大致情况,选取合乎要求的控制点,并在整体影像图上规划好测量控制点的行进路线,保证控制点测量工作顺利进行。
2.3 正射影像制作
正射影像制作流程如图2所示,主要流程包含空三加密、DEM制作、元数据制作和DOM制作等内容。
(1)空三加密
首先需要利用相机文件进行影像的畸变差校正,校正完成后建立影像金字塔和索引文件,后续处理模式和传统方法一致,采用自动相对定向,并辅以人工交互量测方法,按流程加入像控点成果,完成测区的空三加密。
(2)DEM制作
利用空三加密成果生成密度匹配点,滤除粗差点后,对特殊地形人工采集特征点线,构建三角网,获取单模型DEM数据,以测区为单位镶嵌模型DEM数据并内插格网DEM。
(3)DOM制作
基于空三加密和DEM成果进行DOM单片纠正,并进行匀光匀色处理、接边、影像镶嵌与分幅裁切,生成DOM。元数据的制作主要根据分幅DOM的特点,按照统一的标准格式,进行名称、属性、精度等信息的录入。
3 技术探讨
通过低空无人机航摄系统对某地区约50 km2(按1∶2 000分幅共70幅)进行了正射影像制作,其相对定向中误差为4 μm(像元大小为6.4 μm);加密点中误差平面为0.5 m,高程为0.5 m; DOM检测点平面点位中误差为0.63 m,满足正射影像制作的要求,精度统计情况见表2。

表2 DOM成果精度检测
(1)低空无人机飞行的稳定性易受气流影响,为保证航摄影像不出现漏洞,应加大航向和旁向重叠度,一般设计航向重叠度为70%,设计旁向重叠度为50%。
(2)无人机航空拍摄的相机为非量测相机,其像片存在边缘畸变,航摄相机除对常规的主点、焦距进行检校外,还需要对畸变系数进行检校。
(3)单片正射影像间拼接时,应检查和适当编辑拼接线,合理选择平滑参数,使拼接效果最佳,无明显拼接缝。拼接线宜选在河边、路边、沟、渠、田埂等地方,无法避开居民区时应沿河流中间或道路中间排列。
(4)在城市地区构造DEM时,匹配的点有可能在建筑物顶上,内插的DEM会出现突高和突低点,容易引起“拉花”,应滤除掉这些点,并使DEM平滑。
(5)影像阴影过长、密度过大,并已掩盖相邻景物的区域,应进行阴影和密度处理;影像反差过大造成色彩不柔和、反差过小影响景物判别的区域,应进行反差调整。
(6)低空无人机在高层建筑区段航摄,由于影像投影差大、倾斜方向不一致等影响,个别区段需要降低分辨率进行补飞。
4 结论
利用低空无人机航摄系统进行数字正射影像的制作,其相对定向、空三加密、DEM和DOM的精度能满足当前一般城市数字正射影像制作的要求。随着多种机载传感器、无人机硬件制造技术的发展,低空无人机以其机动灵活、现势性强的特点,必能拥有更加广阔的发展前景。
[1] 张剑清,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2003
[2] 毕凯.无人机数码遥感测绘系统集成及影像处理研究[D].北京:中国测绘科学研究院,2009
[3] 张祖勋.航空数码相机及其有关问题[J].测绘工程,2004,12(4)
[4] 张祖勋.从数字摄影测量工作站(DPW)到数字摄影测量网格(DPGrid)[J].武汉大学学报:信息科学版,2007,32(7)
[5] CH/Z 3004—2010 低空数字航空摄影测量外业规范[S]
[6] CH/Z 3003—2010 低空数字航空摄影测量内业规范[S]
[7] 林莉,黄昶.低空无人机航测1000地形图[J].铁道勘察,2012,38(1)
[8] 杨锋, 缪志修,林春峰,等.结合无人机和地面三维激光扫描技术获取高精度DEM及DOM[J].铁道勘察,2013,39(4)
TheApplicaitonofLowAltitudeUnmannedAerialVehiclePhotographySysteminOrthoimageProduction
WEI Yong BI Kai
2014-01-10
魏 涌(1981—),男,2004年毕业于武汉大学测绘工程专业,工程师。
1672-7479(2014)02-0017-03
P231
: B
