长大隧道洞外平面控制网测量方法研究及应用
2014-07-25陈以军
陈以军
(中铁工程设计咨询集团有限公司,北京 100055)
长大隧道洞外平面控制网测量方法研究及应用
陈以军
(中铁工程设计咨询集团有限公司,北京 100055)
介绍长大隧道洞外平面控制网测量的建网方法,重点对GPS控制网设计和一点一方向平差方法进行了分析和研究,结合工程实例,总结长大隧道洞外施工平面控制测量的关键技术。
长大隧道 施工控制网 GPS 洞外控制测量 一点一方向 贯通
隧道贯通误差可分横向、纵向和竖向三个方向的贯通误差,从目前的测量技术水平和工程要求两方面考虑,横向误差最难达到限差要求,隧道控制测量的关键就在于解决横向贯通误差问题。而要减小横向贯通误差,首先要保证洞外平面控制测量的精度。同时,隧道工程只是铁路工程的一部分,其平面控制基准必须与周边工程的平面基准一致或发生转换关系。因此,长大隧道在施工前必须建立统一的洞外平面控制测量基准,既要保证隧道的准确贯通,又要考虑隧道控制测量与其两端线路控制测量之间的准确连接。
以往隧道洞外平面控制测量主要采用三角测量、导线测量等常规地面测量方法进行,要求相邻测站间通视且需逐站放置仪器进行观测。长大隧道多在山区,地形复杂,常规方法测量不仅难度大、时间长、效率低,而且成果精度也不高。
利用GPS进行长大隧道平面控制测量能够减少控制测量时间和成本,具有良好的经济效益。实际生产中,长大隧道洞外平面控制测量应优先采用GPS进行观测,其他常规测量方法只是作为补充。
1 长大隧道洞外GPS控制网设计
1.1 控制点布设
每个隧道口(包括斜井和个别浅埋段)至少布设3个平面控制点,其中一个作为洞口投点,应便于引测进洞,另两个作为方向点。投点和方向点之间必须通视,并且距离在300 m以上。有条件的话可以布设两个投点,各个控制点间尽量相互通视,高差尽量小。
控制点应布设在视野开阔、通视良好、便于使用、不易被施工破坏的地方。控制点布设的位置要考虑后期施工不会被破坏和遮挡。
山区卫星通视条件差,对于视场偏小的控制点位,应根据当地卫星星历预报,制定周密的观测计划,必要时适当延长观测时间。
1.2 控制网图形分析
控制网布设应结合隧道形状与长度、开挖面数量以及施工方法综合考虑,先在地形图上进行网形设计后,再进行实地点位埋设。依据控制点周边环境,制定有效的质量保障措施,确保控制网整体质量。
控制网可分解成两部分,一是洞口子网,二是子网间的联系网。
隧道各洞口子网至少含1个投点和2个方向点,投点和方向点间必须有基线连接。多个投点和多个方向点时,子网由三角形、大地四边形、中点多边形等强度较高的网形构成,网中避免出现短边。洞口子网的图形样式可参考图1。

图1 洞口子网的图形样式
各洞口间的子网联系网由三角形或大地四边形构成,控制网采用边联接的方式构成一个整体,同时联测周边的高等级控制点。联系网的图形样式可参考图2。
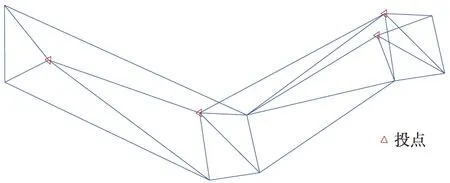
图2 联系网的图形样式
2 GPS控制网外业观测
控制网观测严格执行相关技术要求,采用Leica、Trimble等高精度双频GPS接收机进行观测。测量等级可根据隧道长度及贯通误差而定,要求观测两个时段。控制网测量主要技术要求见表1。

表1 GPS控制网测量的技术要求
作业前对仪器及基座水准器、光学对点器进行检校,确保其工作状态良好。按照预定的观测计划进行同步观测作业,每时段观测前后分别量取天线高,误差小于2 mm,并取两次平均值作为最终结果。在连续观测的两个时段间隙,调整仪器高和天线位置并重新对中,以避免可能发生的仪器高量测粗差,削弱对中误差和天线相位中心偏差。
3 GPS控制网数据处理
3.1 基线解算和质量检核
GPS外业观测结束后,先进行数据的传输和检查,再对观测数据进行基线解算。基线解算采用专用软件进行,在基线处理过程中,对存在周跳、残差较大等质量较差的观测数据进行修复和剔除,以确保观测数据的正确、可靠。
基线向量的质量检核内容包括异步环和重复基线。
(1)由独立基线构成的异步环各坐标分量(WX、WY、WZ)及全长闭合差W检核
异步环闭合差限差按下式计算

(2)重复观测基线较差ds检查
基线重复观测的允许较差按下式计算:

式中:σ为标准差;Si按基线长度计算/km。
3.2 GPS网平差
(1)三维无约束平差
网平差采用专用软件(如“科傻GPS数据处理系统”),以某一点在WGS84下的空间直角坐标为起算点进行三维无约束平差。平差后基线向量各分量的改正数的绝对值(VΔX、VΔY、VΔZ),应满足下式要求
VΔX≤3σ,VΔY≤3σ,VΔZ≤3σ
(2) 二维约束平差
无约束平差精度满足要求后,用隧道进口及出口2个投点作为已知点进行“一点一方向”平差,建立隧道独立坐标系。
“一点一方向”采用固定一个点坐标,并指定一个方向的方位角进行平差。这种平差方法没有进行长度约束,能最大程度保证尺度基准与施工现场符合,减小长度投影变形,即使在约束点相对精度很低的情况下也能保证控制网内符合精度,主要应用于线状工程中。
3.3.4 实验室嗜酸性粒细胞检查 急性期周围血中嗜酸性粒细胞常达15%以上,因而引起白细胞总数的增高;而非急性期也可呈现轻度至中度嗜酸性粒细胞增多,白细胞总数大多正常,但是随着病程后期贫血日趋显著,嗜酸性粒细胞的百分率有逐渐减少的趋势[15]。本研究结果表明嗜酸性粒细胞数或嗜酸性粒细胞百分比升高共53例,对于不能从粪便中检出虫卵,结合流行病学史、血中嗜酸性粒细胞数或嗜酸性粒细胞百分比升高和临床症状者,是否可以诊断性驱虫治疗,由于本研究病例数局限,还需进一步大量临床研究。
“一点一方向”的关键在于平差参数中选择正确的中央子午线和投影面高,起算的坐标和方位角可以任意假定。隧道测量通常采用两种方法建立独立坐标系:
①独立坐标系的X、Y坐标轴方向与原控制网一致,采用隧道中部的经度作为中央子午线经度,坐标投影面高度采用隧道线路中线的平均高程面。约束进口投点在原坐标系中的平面坐标,固定进口投点—出口投点方向,采用一点一方向的方法对GPS网进行平差。
②同样采用隧道中部的经度作为中央子午线经度,坐标投影面高度采用隧道线路中线的平均高程面。X坐标轴方向与该隧道原坐标系中长直线方向一致,里程增长方向为正X轴方向,Y轴方向与X轴构成左手系。GPS网平差计算时约束进口投点在原坐标系中得到的坐标,为了和里程挂钩,其X坐标采用与里程挂钩的坐标;Y坐标为进口投点距长直线的距离。固定进口投点—出口投点在独立坐标系中的方向(也即进口投点—出口投点与长直线方向在原坐标系中的差值),采用一点一方向的方法对GPS网进行平差。
两种方法建立的独立坐标系可按下述坐标转换公式进行转换。
X2=ΔX+X1×cosA+Y1×sinA
Y2=ΔY-X1×sinA+Y1×cosA
式中X1、Y1——第1种方法建立独立坐标系下的坐标;
X2、Y2——第2种方法建立独立坐标系下的坐标;
ΔX——X方向的平移量;
A——旋转角度。
方法1直接采用原坐标系下点做起算,挂靠在原坐标系统下,可以保证隧道进口一端独立控制网与原控制网的无缝衔接,但在隧道出口端隧道独立控制网与原控制网会有较大坐标偏差,需要进行线路调整并设置断链,断链前后要采用不同控制网进行施工。方法2采用了里程、支距的坐标格式,方便隧道施工使用,并且不会与原坐标系混淆。两种方法所建独立坐标系各有优缺点,方法1能与原坐标系无缝衔接,但在出口端要注意与控制网成果区别开来;方法2能直观表达出线路里程关系,符合施工使用习惯,但使用前需要转换设计坐标。
4 工程应用
西铁车二号隧道位于山东省沂源县境内,是山西中南部铁路通道的重要组成部分,隧道全长7 888 m,布设有1个斜井,隧道内铺设无砟轨道。为指导隧道工程施工,保证隧道的准确贯通,需专门建立高精度的洞外平面控制网。
4.1 洞外平面控制网网型设计
洞外平面控制网总共布设了12个GPS点,在隧道进口、斜井和出口各布设了4个平面控制点,如图3所示。图中GPS9201、GPS9205、GPS9209为洞口投点,与隧道洞口相近方便进洞联系测量。控制网采用边联接的方式构网,形成多个大地四边形或空间三角形,将各洞口的子网联系成一个统一的整体网。

图3 西铁车二号隧道控制网联测示意
4.2 数据采集与控制网平差处理
西铁车二号隧道长度超过6 km,在洞外施工平面控制网设计时,考虑到贯通误差及后续无砟轨道铺设的精度要求,采用GPS卫星定位测量方法,按一等网精度要求进行测量。
基线解算合格后进行三维无约束平差,各指标经检验都合格。分别用隧道进口及出口两个投点GPS9201、GPS9209作为已知点,建立独立坐标系并进行一点一方向平差。
独立坐标系的X、Y坐标轴方向与定测控制网一致,采用隧道中部的经度(经计算为117°56′2.691 05″)作为中央子午线经度,坐标投影面高度采用隧道线路中线的平均高程面,经计算其正常高332.151 m,大地高331.04 m。约束进口投点GPS9201在定测坐标系中得到的平面坐标(4 008 847.733 7,468 068.299 0),固定进口投点—出口投点方向,即GPS9201~GPS9209在定测坐标系中的方向(121°32′48.584 74″),采用一点一方向的方法对GPS网进行平差,得到各GPS点在独立坐标系中的坐标成果及有关精度信息。
平差后各网点的点位中误差均较小,全网的平均点位中误差仅为±1.3 mm;点位中误差最大的是GPS9204点,其X、Y方向的方向位差及点位中误差分别为:±2.1 mm、±1.9 mm、±2.8 mm,可见最弱点的点位精度仍然很高,而且点位误差椭圆的形状比较均匀。
平差后各GPS点间的坐标方位角、距离及精度都合格,全网各边的方位角中误差均小于±0.9″,这对控制隧道施工的横向贯通误差非常有利;全网各边的距离相对中误差均小于1/25万,可见本工程建立的GPS洞外平面控制网相对精度达到相关技术指标,可作为隧道施工控制使用。
4.3 控制网外符合精度验证
为进一步验证GPS平面控制网的成果可靠性,采用全站仪导线测量方法把各隧道洞口子网的部分控制点进行边角观测,并与GPS坐标成果反算的角度和边长进行比较,结果见表2和表3。从表中比较情况可以看出,对地面水平距离,两者的平均差值为4.83 mm;对水平角度,两者的平均差值为1.25″,可见地面全站仪的测量数据与GPS坐标反算的数据吻合程度较好,验证了本次GPS控制网测量成果的精度和可靠性。

表2 全站仪测量边长与GPS点坐标反算边长的比较

表3 全站仪测量角度与GPS反算角度的比较
考虑到隧道施工控制网作为一个局部坐标系统,其平差在该系统内进行,因此起算点坐标可以任意假定。本例中用方法1建立独立坐标系,直接使用隧道进口定测控制点坐标作为起算点,使用新高程面,采用一点一方向平差后,出口端隧道独立控制网成果与原定测控制网成果相差较大,这是由于两控制网的基准尺度不同导致的。通过曲线调整,进行不同控制网的衔接处理,调整后在隧道出口直线段产生长链。
4.4 隧道实际贯通精度
西铁车二号隧道贯通后,实地测定隧道贯通相遇点最大横向偏差12 mm,最大纵向偏差40 mm,最大高程偏差4 mm。这说明西铁车二号隧道包含洞外平面控制测量在内的整体控制工作做得很成功,为该隧道的准确贯通提供了有力保障。
5 结束语
长大隧道控制测量在施测前应根据工程控制及施工测量要求、测区实际情况、点间基线长度等情况进行GPS控制网设计,并结合接收机数量、测区交通通讯情况、测站可视卫星数量等因素编制作业观测时段调度计划。控制网约束平差可采用一点一方向进行,建立独立坐标系将长度投影变形值控制在限差内,进而保证隧道施工的准确贯通。
隧道独立坐标系通常以洞内设计路肩的平均高程面作为坐标系统的高程基准面,由于长大隧道都在山区,实际施工高程面比原坐标系的高程投影面要大,因此建立独立坐标系后线路长度一般会变长。
长大隧道控制测量要注意隧道施工独立坐标系与隧道外其他坐标系的设计中线衔接处理,通过控制点相互联测及曲线调整保证施工顺接。隧道独立网施工控制范围一般在长大隧道外直线段,对于桥隧紧邻的段落,隧道独立控制网的控制范围应把整个桥隧群包含在内。
[1] TB 10101—2009 铁路工程测量规范[S]
[2] TB 10601—2009 高速铁路工程测量规范[S]
[3] 张正禄.工程测量学[M].武汉:武汉大学出版社,2005
[4] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2005
[5] 徐辉.长大隧道控制测量方法综述[J].隧道建设,2008,28(5):589-596
[6] 袁宏福,张峰.长大隧道平面GPS控制网的布测与精度分析[J].山西建筑,2011,37(15):200-201
[7] 李超.GPS定位技术在铁路长大隧道测量中的应用[J].山西建筑[J],2011,37(15):198-199
[8] 王兴国,林斌.隧道工程GPS控制网的基准设计与数据处理[J].福建地质,2002,21(4):230-234
[9] 林康力,李贤忠.基于工程实例的GPS控制测量技术探讨[J].科技创新导报,2011(19):100-101
ResearchandApplicationofMeasuringMethodofHorizontalControlNetworkinPortalofLongandHugeTunnel
CHEN Yi-jun
2014-01-14
陈以军(1982—),男,2004年毕业于武汉大学测绘工程专业,工程师。
1672-7479(2014)02-0011-04
TB22
: A
