细长臂打磨机器人结构设计*
2014-07-24王光越
王光越
(中国船舶重工集团公司 第七一〇研究所,湖北 宜昌 443003)
细长臂打磨机器人结构设计*
王光越
(中国船舶重工集团公司 第七一〇研究所,湖北 宜昌 443003)
针对细长圆筒形薄壁壳体设计了打磨机器人,对打磨机器人进行了结构设计,并利用有限元软件ANSYS对细长臂进行了优化,以此来保证打磨的精度和效率。试验结果显示,该机器人具有良好的稳定性,能实现高精度的打磨。
机器人;打磨;细长臂;结构设计
Abstract: In this paper, a grinding robot for slender cylindrical thin shell is designed. In order to ensure the accuracy and efficiency of grinding, the structure of the grinding robot is designed,and the slender arm is optimalized by using the finite elements software ANSYS. The experiment shows that the robot has good stability and can achieve a high grinding precision.
Key words: robot; polishing; slender arms; structure design
0 引 言
在日常生活中,一些细长圆筒形薄壁壳体的内壁需要一定的平滑度,由于壳体内壁结构复杂,而且加工空间狭小,普通人工打磨是不能完成的,因此需要借助于打磨机器人来完成打磨任务。在打磨过程中,由于壳体很长,打磨机器人的臂也很长,打磨过程中容易出现震颤和下沉等现象,影响打磨的精度。笔者对于长度为5 m的圆筒形薄壁壳体设计了打磨机器人,对打磨机器人进行了结构设计和细长臂的优化,以此来保证打磨的精度和效率。
1 工作原理
打磨机器人的主要结构包括底座部件、大臂驱动部件、小臂和腕部驱动部件、传动部件、打磨电机、打磨头以及拖链部件组成。由于细长臂打磨机器人的主要功能是由电机带动打磨臂完成圆形桶壁的打磨工作,因此需要将电机的旋转运动转换为打磨臂的往复平移运动或者旋转运动。这里选择的多自由度打磨机械手臂包括大臂,小臂和腕部。大臂实现的是平移运动,小臂和腕部实现的是旋转运动,整个机械臂在水平面运动。腕部的端部安装有打磨头,可用于实现长圆柱壳体内壁的打磨。同时被打磨的圆柱形壳体装夹在一个可旋转的小车上。通过调整各个伺服电机使机械臂末端的打磨头与圆柱形壳体内壁之间处在一个合适的位置上。按下开关,使圆柱形壳体不断的缓慢旋转,同时启动打磨机器人,将机械臂末端的打磨盘与圆形壳体内壁紧密接触,完成打磨任务。总体结构如图1所示。
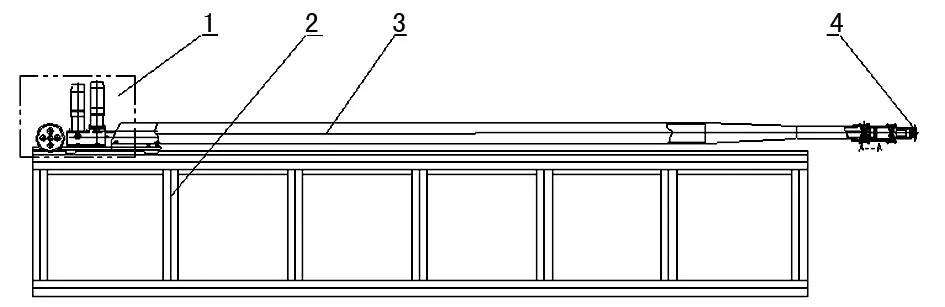
图1 打磨机器人1.驱动部件 2.底座部件 3.机械臂 4.打磨部件
2 方案设计
2.1 机械大臂设计
在整个打磨机械臂中,大臂长4.6 m,因此大臂的设计影响整个打磨机器人的工作精度和效率,考虑到打磨桶壁入口大小和打磨臂长度的限制,这里选择大臂采用的是120×140(mm)的矩形方管,壁厚为8 mm。
在整个设计过程中,最需要考虑细长臂的三个方面的要素。
(1) 自身重量的影响。由于整个大臂长度有4.6 m,而大臂的固定方式则是最左端固定在移动板上面,大臂的右端连接着小臂和腕部,因此在打磨的时候必须对自重给予一定的补偿,如果打磨臂下沉太多,不但会给打磨臂的安装和调试带来麻烦,同时也会影响到打磨的精度。
(2) 打磨臂刚度的影响。打磨臂在打磨的过程中,竖直方向的刚度主要是由大臂的刚度来决定的,而水平方向的刚度主要是由传动链决定的。如果大臂竖直方向的刚度太差,在打磨力的作用下,打磨盘下沉太多,就是去了打磨的作用。因此大臂在竖直方向上必须保证一定的刚度。
(3) 打磨臂的模态分析。模态分析是机械设计中比较常用的一个分析。利用模态分析,可以得到打磨臂的固有频率和振形。由于整个机器在电机的带动作用下运转,因此,应该尽量时打磨臂的固有频率远离电机的转动的频率以避免出现共振而使机器损坏的情况。
为了减轻整个打磨臂的重量,同时保证大臂具有足够的刚度,需要对机械大臂进行刚度分析和模态分析,经过比较得到最终的方案。大臂的前半部分用截面为120×140 mm,壁厚为8 mm的矩形方管,长度为3.6 m,后半部分用截面为80×80 mm,壁厚为4 mm的正方形方管长度为0.6 m,中间用厚度为6 mm的斜板焊接在一起,长度为0.4 m。方案如图2所示。
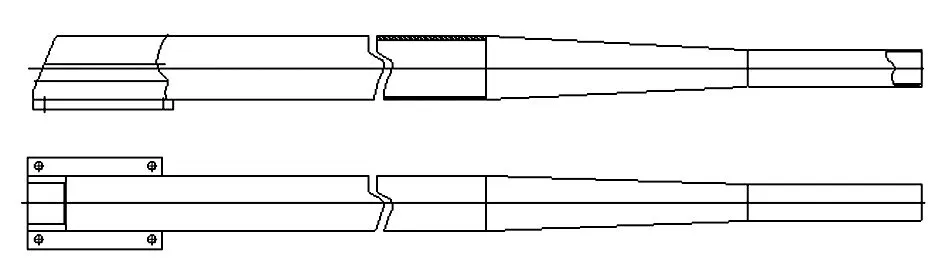
图2 大臂结构图
2.2 大臂传动设计
大臂总长4.6 m,左端部固定在移动板上,具有一个在水平面内沿轴线方向平移的自由度。这一级需要将电机的旋转运动转换为大臂的平移运动,因此可以采用滚珠丝杠传动或者齿轮齿条传动[1]。滚珠丝杠的传动特点是传动平稳,传动精确。但在本次设计中,由于大臂特别长,因此滚珠丝杠也特别长,这容易引起滚珠丝杠的弯曲,造成传动不精确,影响最终的打磨效果。而对于齿轮齿条传动,我们可以将齿条安装在底座支架的上横梁上,而电机、减速器和齿轮依次连接在一起固定在移动板上。这样电机的旋转运动通过减速器降速后传递给齿轮,齿轮在齿条上滚动带动移动板向前移动,而打磨机械手的大臂又通过螺栓固定在移动板上,这样就将电机的旋转运动转换为大臂的往复平移运动。同时,由于齿条安装在支架的上横梁上,不会产生弯曲现象,解决了滚珠丝杠的弯曲问题。
移动板上面带动大臂完成往复平移运动,移动板的下面则固定在平行导轨上,来保证大臂移动的精度。然而,考虑到大臂比较长,若两端均使用平行导轨,虽然可以得到较高的精度,但对于制造和安装的精度要求均比较高,同时也不易调整间隙,在工作过程中容易造成移动板移动困难,甚至出现移动板卡死不能移动的现象。为了解决以上难题,我们可以将一侧的导轨传动换成滚动轴承的滚动,而另一侧的导轨则保留下来。这样做的好处是一方面,我们保留了导轨移动平行度和平稳性比较好的特点,另一方面,通过滚动轴承在滑轨上的滚动,可以适应一些比较恶劣的环境条件,实现间隙可调,这会大大减轻打磨机器人以后的安装和维护工作的强度。
2.3 传动齿轮齿条的设计计算
在这次打磨机器人的齿轮齿条传动中,齿轮的设计显的尤为重要。一方面,齿轮的重量影响到整个机构的响应速度。若齿轮太重,它的转动惯量就会比较大,系统响应的延迟就会比较大;若齿轮太轻,尺寸较小,带负载的能力就会比较弱,同时强度也会降低,影响齿轮的使用寿命。另一方面,齿轮的尺寸太小或者太大,在安装时也会出现一定的问题。因此选用齿轮时应充分考虑以上因素。
齿轮的模数是齿轮的一个重要的参数。齿数一定时,模数越大,齿轮强度越高,承载能力越强,但同时齿轮的尺寸也会增大。由于齿轮的轮廓线为渐开线形式,而齿轮的加工一般用展成法加工也有用成型法的。在加工过程中,微观的看,齿轮的表面并不是平滑的曲面,而是由无数小平面组成的,所以模数越大,齿轮表面的折线就越大,为此,在设计齿轮传动时,在结构强度允许的条件下,尽量选择小模数齿轮。根据齿轮模数的选择范围,初步选定齿轮的模数m=4,考虑到安装尺寸的要求,齿条安装在移动板的下面,齿轮齿条啮合时,齿轮的齿根圆半径应大于减速器半径和板厚之和。经过设计计算,齿根圆半径大于77 mm。考虑到安装误差等因素的影响,这里取齿轮齿数为45。考虑到齿轮重量的影响,采用中间打孔的方式,齿轮经过锻造而成[2]。
经过计算,直齿圆柱齿轮的主要参数如表1所列。
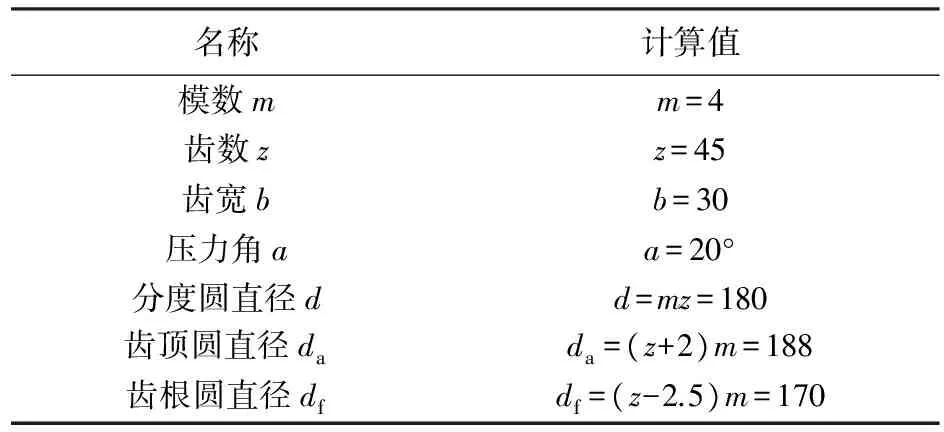
表1 齿轮参数表
对于本次设计的筒壁打磨机器人,打磨力并不是很大,而且直线导轨安装在支架的上横梁上,具有较大的承载能力,这里我们选择导轨的型号是BRH-A&AL,导轨的最大宽度为20 mm。
在这次方案中,采用了齿轮齿条传动。安装时,齿条如果安装在导轨的外侧,齿轮就在打磨机器人的最外边移动,这样安装对操作人员具有危险性。同时,齿轮安装在外部也更易受到环境的影响,对齿轮齿条的润滑也不利。所以采取细长臂打磨机器人一端的最外面是导轨,然后才是齿轮。细长臂打磨机器人的另一端则用来安置拖链。具体布局如图3所示。
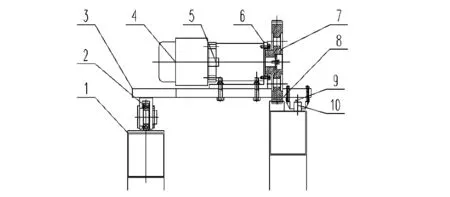
图3 大臂电机结构图1.底座 2.轴承 3.移动板 4.电机 5.减速机 6.电机安装板 7.传动齿轮 8.齿条 9.滑块 10.导轨
2.4 小臂和腕部设计
小臂和腕部各具有一个水平面内的旋转自由度,驱动电机安装在机械臂末端移动板上。小臂和腕部采用链传动的方式,驱动电机安装在电机支架上在大臂与小臂、小臂和腕部之间通过芯轴连接,芯轴上安
装的小链轮通过链条分别与小臂电机和腕部电机相连,实现小臂和腕部的旋转运动。机械臂末端的打磨电机通过螺钉固定在腕部内,打磨电机的末端伸出轴安装打磨轮,以完成圆筒内壁打磨任务。
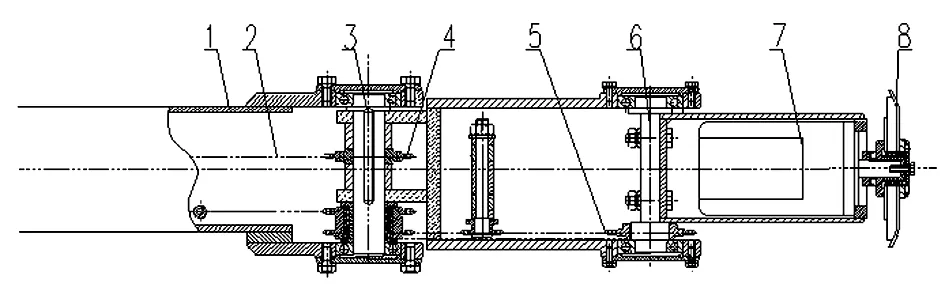
图4 小臂腕部结构图 1.大臂 2.小臂链条 3.小臂芯轴 4.小臂链轮 5.腕部链轮 6.腕部芯轴 7.打磨电机 8.打磨轮
3 结 语
根据目前机械传动的常用方式以及现有的结构形式,结合打磨机器人的具体要求,设计了打磨机器人的总体结构,并提出了采用齿轮齿条的传动方案,并通过一端安装导轨,另一端安装滚动轴承的方式来保证安装精度。经过实物现场运行测试,各项指标均满足设计要求。
[1] 闻邦椿.机械设计手册[M].北京:机械工业出版社,2010.
[2] 孙志礼,冷兴聚,魏延刚,等.机械设计[M].沈阳:东北大学出版社,2000.
Structure Design of Grinding Robot with Slender Arms
WANG Guang-yue
(The710ResearchInstitute,CSIC,YichangHubei443003,China)
2014-06-09
王光越(1987-),男,湖北襄阳人,助理工程师,研究方向:工业机器人。
TH12
A
1007-4414(2014)04-0163-03
