静电陀螺监控器六次校准与赤道陀螺方位环随动性能关系分析
2014-07-20周海渊倪文秀
周海渊,潘 良,倪文秀,陈 思
(1.中国卫星海上测控部,江阴 214431;2.天津航海仪器研究所,天津 300131)
静电陀螺监控器六次校准与赤道陀螺方位环随动性能关系分析
周海渊1,潘 良1,倪文秀2,陈 思1
(1.中国卫星海上测控部,江阴 214431;2.天津航海仪器研究所,天津 300131)
静电陀螺监控器可以全天候提供连续高精度的位置及航向信息,且不受天气制约。但是在低纬度海域静电陀螺监控器会出现六次校准频繁重置的现象,导致静电陀螺无法获得准确的漂移模型系数,进而影响到设备的正常工作。针对上述现象,通过分析设备结构和工作原理,构建了赤道陀螺随动性能数学模型,推导出赤道陀螺方位环随动速率与所在纬度相关性的计算方法,研究了六次校准重置与赤道陀螺随动性能的关系,提出了低纬度地区六次校准重置现象的规避方法。研究结果有效拓展了静电陀螺监控器的启动纬度范围,提高了设备应用效益。
静电陀螺监控器;六次校准;随动性能;赤道陀螺
航向信息是影响测量船测控定轨精度的关键因素之一[1]。与传统的基准航向测量设备光学经纬仪相比,静电陀螺监控器具有不受天气制约且能够提供实时航向信息的优势。
然而在实际应用中,该设备在低纬度地区经常出现六次校准无法正常通过的现象[2],导致设备无法正常工作。
1 六次校准重置与赤道陀螺方位随动性能关系
EGSM工作流程需要经历陀螺启动、六次校准、48 h标定、导航四个阶段。其中,六次校准阶段测量陀螺的初始赤纬及时角,为保证六次校准测量的精确性,系统设置了以下约束条件:∣ah2∣>87º,即赤道陀螺(下陀螺)高度角原始测量值与高度角角度传感器零位的差值大于87º时六次校准重置。
1.1 赤道陀螺方位角随动速率计算方法
在静电陀螺监控器系统中,将极轴陀螺和赤道陀螺的主轴指向代表的两个虚拟“星体”分别以B1和B2表示,在理想情况下,极轴陀螺动量矩轴与天北极Pn重合,赤道陀螺动量矩轴位于赤道平面内[3-6],使“星体”B2的赤纬δ2=0。赤道陀螺对应的天文三角形如图1所示。
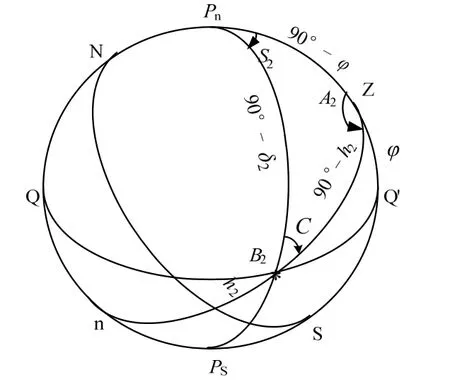
图1 赤道陀螺星体对应的天文三角形Fig.1 Astronomy triangle relation of equator-gyro
图1中,由天顶Z、天北极Pn和陀螺星体B2构成球面三角形,三个角分别为方位角A2、地方时S2和C角;对应的三个边分别为 90º-δ2、90º-h2和 90º-φ。这里δ2≈0,h2为赤道陀螺高度角,φ为纬度。
根据球面三角形的变换公式,可以得到:
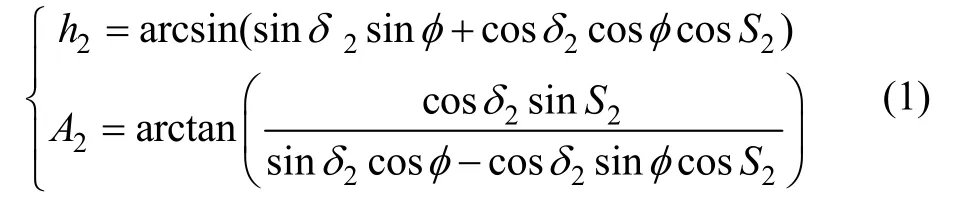
式(1)即为赤道陀螺的高度角和方位角公式。式(1)对时间求导数即可得到h2和A2的变化率,下面给出h2和A2变化率的简化公式及推导过程。
根据图1中的球面三角形可以得到:

在静电陀螺监控器中,陀螺星体的赤纬δ启动后基本为常值,对于在舰船导航系统中纬度φ变化相对地球自转也是小量,可认为是常量,因此,式(2)两边对时间求导可得:

根据球面三角形的关系有:

将式(1)代入式(3)中,可得:

由于S2=Sg0+Ωt+λ,其中Sg0为赤道陀螺的初始格林时角,Ω为地球自转角速度,λ为经度,可得dS2/dt=Ω,代入式(5)即可得到h2变化率的简化公式:

根据式(4)可得:

式(4)两过对时间求导,并认为δ2为常值,得:
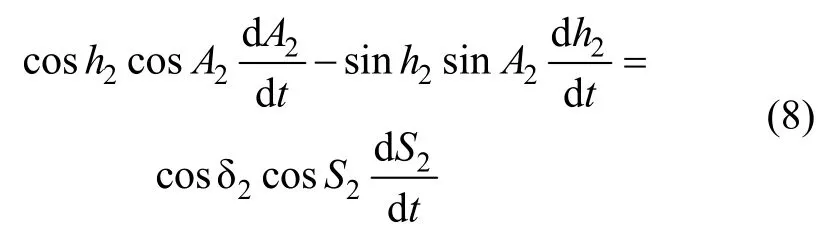
根据球面三角形关系,有:

将式(9)(5)代入式(8),整理得:

根据球面三角形关系,有:

将式(1)代入式(10),整理得:

根据球面三角形关系,有:

将式(13)代入(12),做 sinδ2≈0 近似,可获得A2变化率的简化公式:

静电陀螺监控器赤道陀螺高度角h2变化范围为:0º~90º-φ,当h2=90º-φ时,A2最大变化率为:

1.2 赤道陀螺方位角随动性能与六次校准关系研究
在纬度为±5°范围内,根据式(15)计算出纬度与赤道陀螺方位角变化率之间的关系,结果如图2所示。在计算中地球自转角速度取值Ω=15 (º)/h。
从图2的纬度与赤道陀螺方位角变化率关系不难验证,在赤道附近赤道陀螺方位环理论上需要极高的随动性能才能满足设备工作需求[7]。在南北纬3º和2º,理论上赤道陀螺方位角最大变化率绝对值分别为0.0796 (º)/s和 0.1196 (º)/s,即赤道陀螺方位随动达到上述性能才能保证在相应海域内正常工作。
依据六次校准约束条件,赤道陀螺高度角h2绝对值不能大于87º,即在纬度±3°内设备理论无法工作。然而根据设备实际工作情况统计,ESGM在该纬度区域内并不是每次都出现六次校准无法通过的现象,某一特定ESGM设备六次校准重置的极限条件根据设备具体情况有所区别。对某一ESGM设备近30次启动工作情况进行统计,设备六次校准通过最低纬度记录为北纬2º,对应赤道陀螺高度角与赤道陀螺方位角变化率情况如图3所示。
图3数据分析表明此ESGM设备工作过程中赤道陀螺高度角最大为87.71º,对应最大方位角变化率为0.1041 (º)/s。上述数据可以视为该ESGM设备六次校准重置的极限条件。如果该设备启动要避免六次校准重置现象发生,必须规避上述极限条件发生。

图2 纬度与赤道陀螺方位角变化率关系Fig.2 Relation between latitude and azimuth angle change velocity of equator-gyro

图3 某次试验赤道陀螺高度角与赤道陀螺方位变化率Fig.3 Relation between height angle and azimuth change velocity of equator-gyro
2 六次校准重置规避方法
从前面分析可以得出规避低纬度地区ESGM六次校准重置现象有两种方法,一是提高赤道陀螺方位环随动性能,二是在设备工作过程中尽可能减小设备启动过程引入的误差,同时有效规避赤道陀螺高度角和方位角变化率超出设备随动性能。
相关措施主要包括以下方面:
1)ESGM 设备启动前支撑惯导必须经过充分校准,航向、位置、水平姿态精度必须满足指标要求,减小惯导引入误差对六次校准造成影响。
2)设备启动需要6 h以上等纬度航行工况保障,极轴陀螺和赤道陀螺分时启动,阻尼定中时间要大于40 min,以减小设备启动中陀螺动量矩轴定向误差对六次校准的影响。
3)由于不同陀螺的随动性能不同,根据积累的试验数据,计算每个陀螺的方位随动性能,尽量避免在满足陀螺随动性能的范围内启动设备或者进行六次校准。
4)赤道陀螺高度角和方位角变化率的极大值每六小时出现一次,如果在低纬度启动设备,六次校准过程中船舶应该向高纬度区域机动,减小赤道陀螺方位角随动负担,以免出现六次校准重置甚至是陀螺“未捕获”告警。
上述方法在设备启动中进行了多次应用,有效规避了六次校准重置的现象。
3 结 论
静电陀螺监控器在低纬度海域对赤道陀螺方位环的随动性能要求极高,设备容易出现六次校准重置现象。本文从分析设备工作原理入手,构建了赤道陀螺随动性能数学模型,推导出了赤道陀螺方位环随动速率与所在纬度相关性的计算方法,研究了六次校准重置与赤道陀螺随动性能的关系,从理论和实际应用两个方面提出了规避低纬度地区六次校准重置的办法。
本文的研究成果拓展了静电陀螺监控器的启动纬度范围和设备的应用效益。
(References):
[1]冯鸿奎,李晓勇,薛国虎,等.航天测量船导航系统ESGM技术[J].飞行器测控学报,2010,29 (1):28-33.FENG Hong-kui,LI Xiao-yong,XUE Guo-hu.et al.Application of ESGM technique on space instrumentation ships[J].Journal of Spacecraft TT &C Technology,2010,29 (1):28-33.
[2] 刘新民,孙学成,周琳琦,等.静电陀螺监控器海上“六次校”方法[J].中国惯性技术学报,2011,19(4):309-402.LIU Xin-ming,SUN Xue-cheng,ZHOU Lin-qi,et al.Method of electrostatic gyroscope monitor’s maritime six-times calibration[J].Journal of Chinese Inertial Technology,2011,19(4):309-402.
[3]Christensen W.Advanced development of ESG strap down navigation system[J].IEEE Transactions on Aerospace and Electronic Systems,1996,2(2) :143-157.
[4]ZHANG Ke-zhi,TIAN Wei-feng,QIAN Feng.Combination of distributed Kalman filter and BP neural network for ESG bias model identification[J].Transactions of Nanjing University of Aeronautics &Astronautics,2010,27(3):226-231.
[5]Yang Gong-liu.Study on simulation techniques for marine integrated navigation system[C]//Second International Symposium on Inertial Technology in Beijing.Beijing,October 1998.
[6]Hill D A,Letendre T,Mills H A.Embedded real-time DSP control of an electrostatically gyroscope[C]// Proceeding of the American Control Conference.Boston 2004.
[7]王前学,倪文秀,刘巍,等.静电陀螺监控器海上赤道陀螺仪低纬度下的随动性能[J].中国惯性技术学报,2010,18(1):90-92.WANG Qian-xue,NI Wen-xiu,LIU Wei,et al.Servo performance of ESGM’s equatorial gyroscope in low-latitude regions[J].Journal of Chinese Inertial Technology,2010,18(1):90-92.
Relation analysis between six-calibration and follow capability of equator-gyro about ESGM
ZHOU Hai-yuan1,PAN Liang1,NI Wen-xiu2,CHEN Si1
(1.China Satellite Maritime Tracking &Controlling Department,Jiangyin 214431,China;2.Tianjin Navigation Instrument Research Institute,Tianjin 300131,China)
Compared with traditional optical theodolite,a high-precision course information can be supplied by ESGM at all-weather.While in low latitude areas,the Six-Calibration of ESGM may be frequently reset by the poor follow capability of equator-gyro,and the accurate ESG drift model coefficient is unable to be obtained.In this paper,according to the former phenomenon,the follow capability of equator-gyro about ESGM is calculated in principle,and the relation between six-calibration and capability of equator-gyro is analyzed.An effective method is put forward to avoid six-calibration to be reset in low latitude areas.The research results show that the ESGM start latitude range can be effectively expanded,and the application efficiency can be improved by the proposed method.
ESGM;six-calibration;follow capability;equator-gyro
U666.1
A
1005-6734(2014)03-0281-03
10.13695/j.cnki.12-1222/o3.2014.03.001
2014-01-24;
2014-04-29
周海渊(1982—),男,工程师,从事惯性导航设备应用研究。E-mail:lynn9527@gmail.com