回转头压力机不同的工作机构动态特性的研究
2014-07-18赵升吨张宗元张贵成张超陈超贾先
赵升吨,张宗元,张贵成,2,张超,陈超,贾先
(1.西安交通大学机械工程学院,陕西西安710049;2.广东锻压机床厂有限公司,广东佛山528000)
回转头压力机是传统的锻压机械,一般由下面几个部分组成:
(1)工作机构。传统的压力机一般为曲柄滑块机构,由曲轴、连杆、滑块等零件组成;(2)传动机构,包括齿轮传动、皮带传动等机构;(3)操作系统,如离合器、制动器;(4)能源系统,如电机、飞轮;(5)支撑部件,如机身。按照其结构特点可分为三类产品,包括机械式压力机、液压式压力机以及以伺服电机直接驱动的结构形式。
近年来,随着电机调速和伺服控制技术的飞速发展,采用伺服电机驱动主传动系统的数控伺服压力机,具有冲压速度高、节能低噪声、环保无液压油等优点。为了适应高速发展的汽车、轻工业等工业的飞速发展,冲压成型工艺一直在不断地发展和改进,作为压力机的主传动机构,一直是压力机技术进步的标志之一。主传动机构的结构形式上主要有直线电机驱动式、螺杆式、曲柄式、肘杆式、差动轮系,这几种形式通过单一使用、两两组合或者3种结合使用。近年来,国内外研究人员对此方面进行了大量改进和实践,研制出了多种形式的压力机工作机构。在传统曲柄滑块机构的基础上,提出了适应不同冲压工艺的肘杆式、多连杆式机构,大大提高了压力机的力学性能和运动特性。
为了深入研究肘杆机构的优缺点,分别设计了3种不同类型的肘杆式压力机工作机构,分别建立其数学模型,并分别对其杆系进行优化设计,并建立各自的三维结构模型,然后分别分析对比这3种不同类型的肘杆式压力机工作机构的动力学性能。
1 传统曲柄滑块式结构

图1 曲柄滑块压力机的原理图
曲柄滑块压力机的原理如图1。曲柄滑块机构因结构可靠、生产效率高、操作简便成为传统压力机最主要的工作机构。经过长期的研究与使用,曲柄滑块机构的运动规律及受力分析都已经很成熟,这类机构具有以下缺点:(1)曲柄压力机的滑块总是按照正弦曲线的规律变化,在拉伸过程中运行的速度、加速度较大,使得滑块速度变化规律不理想,公称压力行程较小;(2)上、下模合模的瞬时冲击力较大,使得噪声比较大,主机和模具的使用寿命降低;(3)机构的增力效果不明显,导致曲轴上所需的输出扭矩比较大,传动机构的尺寸要求比较大,使得生产成本居高不下,生产效率低。
按照滑块结点位置可将曲柄滑块机构分为结点正置的曲柄滑块机构、结点偏置的曲柄滑块机构,其中结点偏置的曲柄滑块机构还分为正偏置和负偏置机构,见图2。结点偏置的曲柄滑块机构可以改善压力机的受力状态和运动特性,从而提高压力机的精度,以适应不同的工艺要求。正偏置机构常在平锻机中采用,负偏置机构则常在热末端压力机和冷挤压机中采用。

图2 结点偏置的曲柄滑块机构简图
曲柄滑块式压力机工作机构经过多年的发展和进步,出现了双驱动 (DualDrive)。曲柄压力机,双驱动机构可以使滑块在上死点以非常慢的速度,而在下死点以非常快的速度运行,为了实现这种滑块运行方式,这种压力机配备有两套驱动装置。一套传统的主驱动装置,带有飞轮、组合在飞轮中的离合器/制动器及行星齿轮减速单元。一套变频控制的辅助驱动装置,负责除锻造过程以外时间滑块的运行。采用被称为DualDrive的这种驱动方式,可以使滑块在上死点区域以6~12次/min的速度运行,而在下死点区域则以60~120次/min的速度运行。这样可将模具的焖模时间减少到最低限度,从而提高了模具的寿命,此外,还延长了用于进行模具冷却和零件传输的时间。这意味着,在充分利用压力机效能的基础上显著提高压力机的生产率。
2 肘杆式工作机构
肘杆式机构是一种简单的多连杆机构,这种机构相比较曲柄连杆机构,在曲柄连杆上增加了几个构件,从而增加了机构工作特性的可变因素。可以通过调整或改变任何一杆的长度或曲柄和摆杆铰销之间的距离,改变这个机构的动力和运动特性,具有工作特性优良、增力比大的优点。图3是几种不同的肘杆式机构原理图。

图3 3种不同肘杆式机构原理图
肘杆式压力机的工作区域比普通的曲柄连杆压力机的工作区域长,在整个工作区域内能实现满负荷冲压,并且能够适应不同加工工艺的需求。肘杆式压力机不仅能够实现很理想的滑块运动曲线,以及较大的增力特性,更重要的是能够大大降低伺服电机的输出扭矩,从而避免大功率伺服电机存在的成本高、高耗能、伺服控制困难等问题。根据肘杆结构的不同,可分为等长肘杆型和三角肘杆型。图4为日本小松公司H1F系列伺服压力机传动结构,是典型的三角肘杆机构,伺服电机通过一级皮带和一对齿轮减速后由肘杆机构驱动滑块实现加工运动。
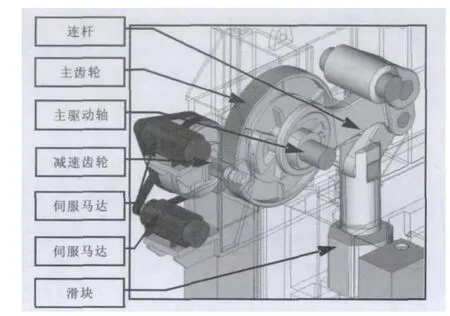
图4 小松H1F伺服压力机传动系统
与曲柄连杆机构相比,在伺服压力机设备中采用肘杆式机构,具有如下优点:
(1)根据不同的工艺要求,设计不同杆长、三角肘杆夹角,实现最理想的滑块运动曲线,获得足够长的工作区域,保证冲压工件的质量,并具有更好的急回特性,提高生产效率。
(2)可以降低滑块在工作区域时的速度,减小了振动和冲击,使机器工作稳定、噪声降低,同时提高了模具寿命。
(3)用较小的曲柄半径就可获得较大的滑块行程,扩大了压力机的加工范围,有利于减小压力机的结构尺寸和提高压力机的结构刚性。
(4)具有较好的增力特性,能够大大降低伺服电机的输出扭矩,有利于减小伺服电机容量,提高压力机吨位。
3 3种类型的肘杆式工作机构及其优化设计
上一节提到肘杆机构具有众多优点,已经在伺服压力机上得到广泛的应用。多连杆式机构相比较肘杆机构杆数多,参数复杂,设计思路和计算方法也就相应复杂,但是多连杆机构可通过非独立构件尺寸参数的设计计算,优化出最合理的参数,使伺服压力机精确满足理想的技术参数和运动曲线,特别是外滑块的位移波动量精确地控制在拉延工艺方面的应用,从而提高压力机的使用性能。
现代伺服压力机广泛采用多连杆机构作为其工作机构。按照多连杆的机构形式,内滑块多连杆机构可分为曲柄做变速运动的曲柄滑块机构、双驱动多连杆机构、“连杆曲线”型六连杆机构、复合多连杆机构等;外滑块多连杆机构可分为串联四连杆机构等。下面结合3种典型的多连杆式工作机构的数学模型,并对其进行优化设计,然后分析对比这3种多连杆式工作机构的结构特性及运动特性。图5是3种不同肘杆机构的工作机构图。

图5 3种不同肘杆机构的工作机构图
3.1 三角连杆机构
三角连杆机构的结构比较简单,由曲柄、三角连杆、上肘杆、下肘杆及滑块组成。建立三角形连杆机构的数学模型,如图5(a)所示。
整个机构的运动参数为时间和曲柄转角的函数。假设曲柄以ω的角速度匀速转动,通过平面机构运动分析当中的解析法可求得:
(1)滑块位移方程为:

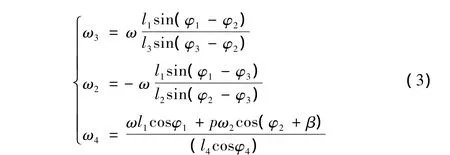
(2)滑块速度方程为:

式中:
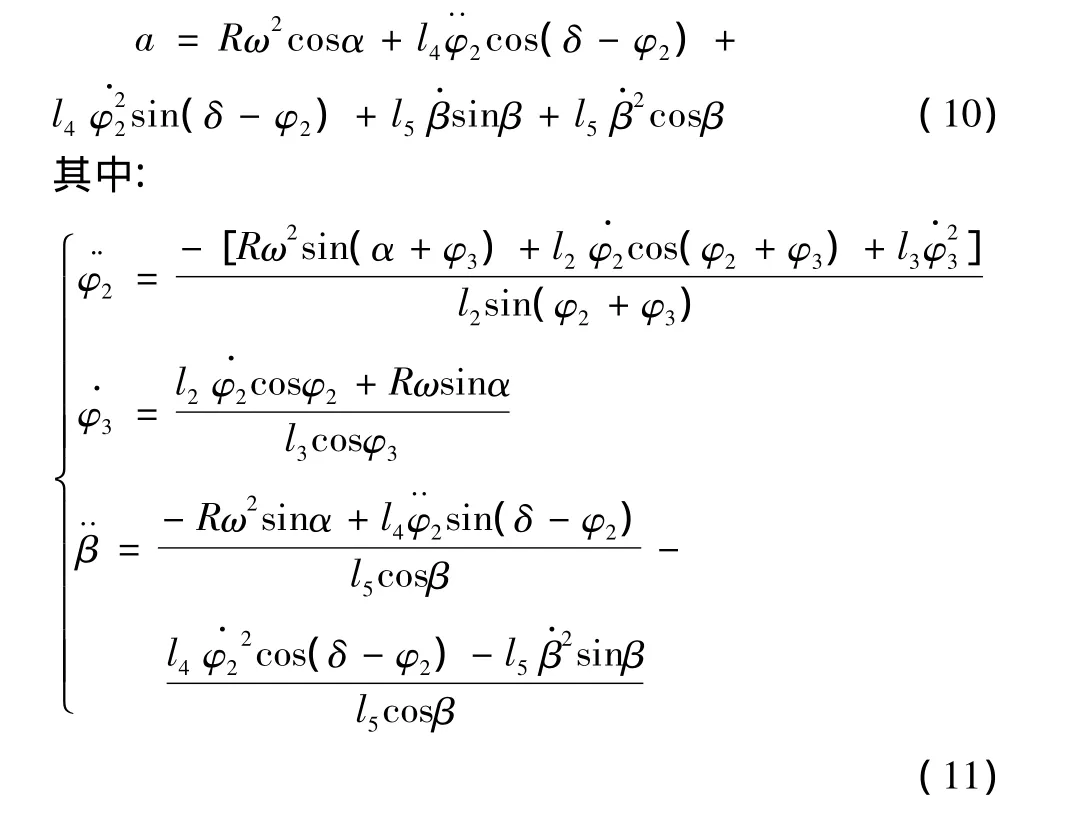
(3)滑块加速度方程为:

3.2 “连杆曲线”型六连杆机构
“连杆曲线”型六连杆机构运动特性与受载特性较好,通用性好,是目前肘杆机构中用的较多的一种。“连杆曲线”型六连杆机构的数学模型,如图5(b)所示。
滑块位移、速度、加速度均是曲柄转角α的函数,假设曲柄R以逆时针方向等角速度ω旋转,下死点位置是曲柄R,杆l4,杆l5共线时刻。由图中可以看出,滑块位移方向通过曲柄的旋转中心O。由分析法计算得出“连杆曲线”型六连杆机构的运动学方程。
(1)滑块位移方程为:


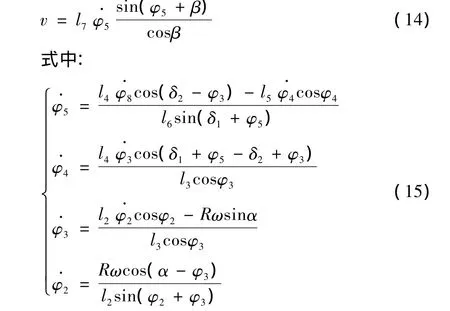
(2)滑块速度方程为:

(3)滑块加速度方程为:
3.3 串联四连杆机构
串联四连杆机构一般采用三组四连杆机构串联。由于四连杆机构在曲柄与连杆共线位置附近,主动曲柄与从动摇杆间有较大的瞬时减速比,因此当被串接的四连杆机构数增加,并且均在共线位置附近工作时,机构可获得很大的降速比。“串联四连杆机构的数学模型,如图5(c)所示。同样,曲柄以顺时针方向等角速度ω旋转。以下为建立的机构运动学方程。
(1)滑块位移方程为:(2)滑块速度方程为:

(3)滑块加速度方程为:

4 3种类型的肘杆式工作机构的优化设计
利用MTALAB软件对3种不同类型肘杆机构的数学模型编程,并以滑块行程为25 mm作为约束条件,以滑块在4 mm公称压力行程内的最大速度最小化作为优化目标,利用MTALAB软件编写程序进行优化设计,根据最终优化结果分别确定3种类型的三角肘杆式压力机工作机构的结构尺寸。
利用MATLAB软件,对3种类型的肘杆机构数学模型分别编写运动特性仿真程序,设定滑块行程次数400次/min,对其运动学特性进行模拟仿真,并将仿真结果进行分析对比。可得出三种不同类型的肘杆机构的滑块位移、速度、加速度曲线如图6、7、8所示。

图6 三角连杆机构运动特性曲线图
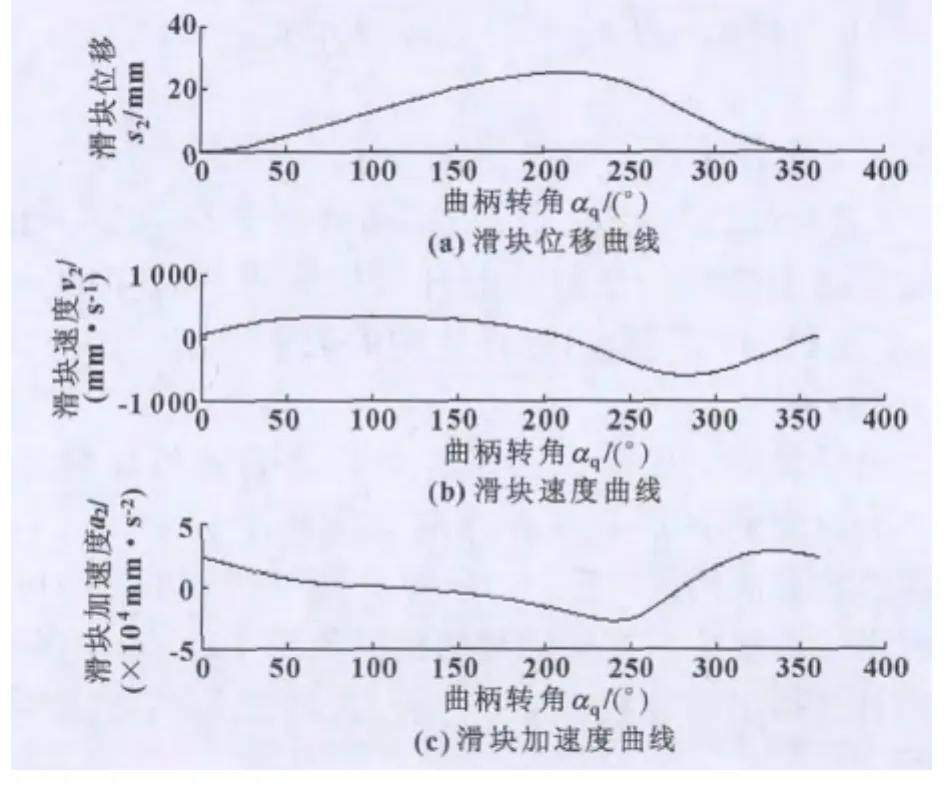
图7 “连杆曲线”型六连杆机构运动特性曲线图
由图6可见,三角连杆机构位移变化规律为类正弦曲线,需要关注的是在压力行程内三角连杆机构的位移、速度、加速度的大小及变化情况。由图中可以看出,在4 mm压力行程内,三角连杆机构的最大速度为108.5 mm/s,最大加速度为1 653.8 mm/s2。

图8 串联四连杆机构运动特性曲线图
由图7、图8可以看出,“连杆曲线”型六连杆机构和串联四连杆机构位移变化规律与三角连杆机构具有明显不同,在很大程度上改变了滑块运动特性曲线。由图6可以看出“连杆曲线”型六连杆机构在工程压力范围内,滑块的位移、速度、加速度都有明显的改善,其最大速度为92.8 mm/s,最大加速度为1 457.9 mm/s2。由图7可以看出串联四连杆机构滑块只有在工程压力范围附近,滑块才有明显的位移和速度。可以看出此机构具有明显的急回特性,其最大速度为123.2 mm/s,最大加速度为1 872.2 mm/s2。
由此可以得出,在此工作情况下“连杆曲线”型六连杆机构在压力行程内的最大速度最小,加速度也最小,滑块速度变化最平稳,工作情况最稳定,有利于提高零件加工质量,减小零件对模具的冲击,延长模具使用寿命。
5 结论
(1)与传统的曲柄滑块机构相比,采用肘杆式机构能够大大降低回转头压力机所选用的交流伺服电机的输出扭矩及功率。
(2)三角连杆机构是相对简单的肘杆机构,在这种小行程、高频率的工作压力机中,其对滑块运动特性的改变不是很明显。
(3)串联四连杆机构主动曲柄与从动摇杆间有较大的瞬时减速比,因此当被串接的四连杆机构数增加,并且均在共线位置附近工作时,机构可获得很大的降速比。
(4)为了减小模具的冲击,延长模具使用寿命,希望回转头压力机在压力行程内的最大速度最小,当以压力行程内的最大速度最小为优化目标时,“连杆曲线型”六连杆机构相对于三角连杆机构、串联四连杆机构性能更好。
[1]何德誉.曲柄压力机[M].北京:机械工业出版社,1985.
[2]苏敏,王隆太.几种伺服压力机传动机构方案的分析与比较[J].锻压装备与制造技术,2008,43(5):35 -38.
[3]董桂伟,栾贻国,孙琳琳,等.拉延压力机多连杆机构运动分析与优化设计[J].锻压装备与制造技术,2006,46(1):27-30.
[4]赵升吨,张学来,高长宇,等.高速压力机的现状及其发展趋势[J].锻压装备与制造技术,2005,40(1):17-25.
[5]莫健华,张正斌,吕言,等.三角肘杆式伺服压力机传动机构的仿真与优化[J].锻压装备与制造技术,2011,46(1):21-25.
[6]朱新武,闻开斌,任东杰.肘杆式伺服压力机的运动分析[J].锻压装备与制造技术,2011,27(4):29 -32.
[7]方喜峰,陆宇平,吴洪涛,等.肘杆式数控转塔冲床运动和动力学分析与设计优化[J].机械与电子,2007(11):3-6.
