微液滴在仿蛛丝结构TiO2纤维表面的定向运动与粘附
2014-07-14王莉赵勇江雷*,,2
王 莉 赵 勇 江 雷*,,2
(1中国科学院化学研究所,北京 100190)
(2北京航空航天大学环境化学学院,北京 100191)
现代技术的发展不断推进着器件的微型化和多功能化。与传统大型器件相比,这些微小功能单元有着独特的优势,比如,损耗低、速度快、更便携、更能精确追踪或完成微纳领域的物理化学反应等等。对于微芯片反应器件,微流控制是其运转的核心内容。早在20世纪90年代,科学家们就可以通过设计具有特殊能量梯度或官能团的表面,成功实现对几百微米尺度液滴的调控[1-6]。而对于如何在更加微小的尺度内精确调控液体行为这一问题,一直以来备受关注[7-15]。最近,我们[13,16-19]发现自然界中的蜘蛛丝可以定向驱动微米级液滴运动,并且成功制备了仿生蛛丝纤维,其液滴驱动能力可跟天然蜘蛛丝媲美。在微米尺度内引入智能响应性材料,通过光、电、磁、温度等刺激手段,实现远程的或非接触式的控制,不失为一个良好的解决微纳领域流体操控难题的手段[20-21]。NIPAAm(N-异丙基丙烯酰胺)聚合物,一种性能优异的温度响应性智能材料,在人造蛛丝基础上,具有温度响应性的仿蛛丝NIPAAm聚合物纤维被成功制备。通过设计纤维微观结构和调控环境温度,微小液滴可以在这种温度响应性NIPAAm聚合物纤维上可逆地定向运动[21]。相对于电、磁、温度等响应性智能材料,光响应材料有其独特之处。例如,通过控制外界光刺激,光响应材料可以实现定点、非接触式、快速响应等功能,这对于智能微小尺度流体驱动领域研究具有重要意义。在本文中,我们受天然蜘蛛丝启发,制备了具有响应性的仿蛛丝结构TiO2纤维,通过控制紫外光照和超声波等刺激手段,这种纤维可以实现微液滴的定向驱动和粘附。
本研究表明,对于表面光滑的仿蛛丝结构TiO2纤维,其表面是亲水的,微小水滴首先会在其表面凝结形成液膜,然后以液膜形式从纺锤节两端向中心运动;对于表面粗糙的TiO2仿蛛丝结构纤维,当其表面为亲水状态时,水滴同样从纺锤节两端向中心定向运动。但当其表面疏水时,水滴首先会在其表面凝结,然后从纺锤节两端到中心定向运动,当达到一定尺寸时,则被纺锤节两端表面粘附。本工作将光响应浸润性TiO2表面引入仿蛛丝结构纤维体系内,成功实现了对微液滴的非接触式、远程、定点的调控,为设计和制备多功能智能微型系统提供了新的思路。
1 实验部分
1.1 试剂与材料
去离子水(Milli-Q,Millipore 0.22 μm,超纯水),无水乙醇(EtOH,北京化工厂,分析纯),聚苯乙烯(PS,Mw~192 000,Aldrich),四氢呋喃(THF,北京化学试剂公司,分析纯),N,N-二甲基甲酰胺(DMF,北京化学试剂公司),异丙醇钛(Aldrich),冰醋酸(分析纯,北京化工厂),浓硝酸(分析纯,北京化工厂),氨水(分析纯,北京化工厂),氢氟酸(分析纯,北京化工厂),玻璃纤维,硅片。
1.2 溶液配置
TiO2溶胶制备[22]:在冰浴中,将5 mL异丙醇钛逐滴加入100 mL含1 mL硝酸(68%)和10 mL冰醋酸(99.9%)的酸性水溶液中,强烈搅拌。然后将混合液(pH=1~2)放入60℃水浴中恒温搅拌16 h,待用。
SiO2溶胶制备[23]:将Si(OEt)4加入氨水水溶液中,搅拌,溶液 pH 约为 8.0。
PS溶液配制:以THF为溶剂分别配制7wt%、10wt%、15wt%的PS/THF溶液。
1.3 TiO2仿蛛丝结构纤维制备
表面粗糙的仿蛛丝结构TiO2纤维的制备:(1)首先将直径为 (11.2±0.3)μm 的玻璃纤维浸入PS/THF的溶液中。然后将玻璃纤维以大约40 mm·min-1的速度水平拉出液面。此时,纤维被聚合物的液膜所覆盖。由于Rayleigh不稳定作用,聚合物液膜沿着纤维自发破裂成周期性的聚合物液滴。当聚合物溶液完全干燥之后就形成了具有周期性纺锤节[13,24]的、表面粗糙的PS仿蛛丝纤维。(2)通过浸渍提拉法,以40 mm·min-1的提拉速度,在如(1)所制的PS仿蛛丝结构纤维上涂覆SiO2保护层,干燥待用。(3)最后在涂覆SiO2的PS仿蛛丝结构纤维上涂覆TiO2溶胶层,实验步骤同(2)。
表面光滑的仿蛛丝结构TiO2纤维的制备:将5 mL的DMF置于玻璃培养皿(φ 120 mm)中,然后将盛有DMF的玻璃培养皿放于干燥器 (φ 150 mm)底部,最后将具有粗糙表面的PS仿蛛丝结构纤维放置于干燥器中密闭,在50℃下2 h,然后自然干燥。其余步骤与表面粗糙的仿蛛丝结构TiO2纤维的制备步骤相同。
硅片使用之前分别用二次蒸馏水、丙酮超声波清洗30 min(40 kHz,100 W),然后用5%的氢氟酸溶液浸泡5 s以确保其表面疏水,硅片上薄膜样品制备方法及步骤与上述纤维制备相同。
1.4 仪器及表征
纤维接触角仪(OCA40光学视频纤维接触角测定仪,德国Dataphysics公司);场发射扫描电子显微镜 (HITACHI-4800,日本);光学显微镜(Olympus microscopy system Model BX51);离子溅射仪(SBC-12,中国科学院科学仪器有限公司);亚都YC-E350超声波加湿器(北京亚都科技有限公司);超声波清洗器 (KQ-50DA,40 kHz,100 W);高压汞灯 (1 000 W);滤光片(中心波长为 360 nm,半宽度为 10 nm);提拉机(WPTL5-0.01,沈阳科晶自动化设备有限公司)。
用高压汞灯进行紫外光照处理时,加中心波长为360 nm的滤光片,光照时间为15 min;用超声波处理样品条件为:40 kHz,100 W,30 min;用 OCA40光学视频纤维接触角测定仪对仿蛛丝结构纤维的液滴驱动及粘附能力进行表征。纤维被水平固定在样品架上。由加湿器产生的含有微小水滴的雾气流被引入放置纤维的样品室。整个过程用OCA40的光学显微镜和CCD组件记录成带有时间轴的视频文件。能够在纤维上观察到液滴的时间点被作为时间零点。液滴运动的距离可以从相邻几帧的图片中得出。液滴运动的尺寸可以从图片中直接测量得到。
2 结果与讨论
2.1 不同表面TiO2的形貌及浸润性表征
首先,对具有不同粗糙结构的平面TiO2膜浸润性进行研究,作为仿蛛丝结构纤维体系的参考。在平面实验中,选用疏水的硅片作为基底,在其上依次浸渍提拉制备PS/SiO2/TiO2涂层,干燥后所得具有蜂窝状的粗糙表面。在PS膜上涂覆SiO2是为了避免在紫外光照时TiO2氧化底层的PS,且增加涂层的稳定性[23]。对于光滑表面PS/SiO2/TiO2涂层,在涂覆PS层之后,需要在DMF密闭气氛中,50℃下处理2 h,其余步骤与粗糙膜相同。从图1中可知,对于新制备的TiO2涂层,水滴接触角WCA(Water Contact Angle)为(55.6°±1.2°),经紫外光照后,表面更加亲水,其 WCA 为(6.3°±1.2°),将紫外光照后亲水表面用超声波处理,其WCA又会回到原来的相对疏水状态(54.3°±2.7°)。对于粗糙表面,在新制备状态下,WCA 为(104.1°±0.7°),经过紫外光照后,表面变为超亲水状态(WCA<5°),然后再经过超声波处理后,其又恢复到原来的疏水状态(107.3°±1.5°)。实验结果表明,经过交替的紫外光照和超声波处理,无论光滑还是粗糙表面均显示了良好的浸润响应性[21,25-27]。本研究中所制备TiO2纳米溶胶的晶型属于锐钛矿[22],见图2。光滑表面的前进角θr和后退角θa分别为 43.21°和 65.07°;粗糙表面的 θr和 θa分别为60.05°和 110.18°。

图1 TiO2薄膜表面形貌及其可逆的浸润性变化。(a)光滑的PS/SiO2/TiO2表面形貌及其在紫外光和超声波处理下可逆的浸润性;(b)粗糙的PS/SiO2/TiO2表面形貌及其在紫外光和超声波处理下可逆的浸润性Fig.1 SEM image and reversible wettability of TiO2films.(a)SEM image and reversible wettability changing by ultraviolet and ultrasonic of smooth PS/SiO2/TiO2film;(b)SEM image and reversible wettability changing by ultraviolet and ultrasonic of rough PS/SiO2/TiO2film
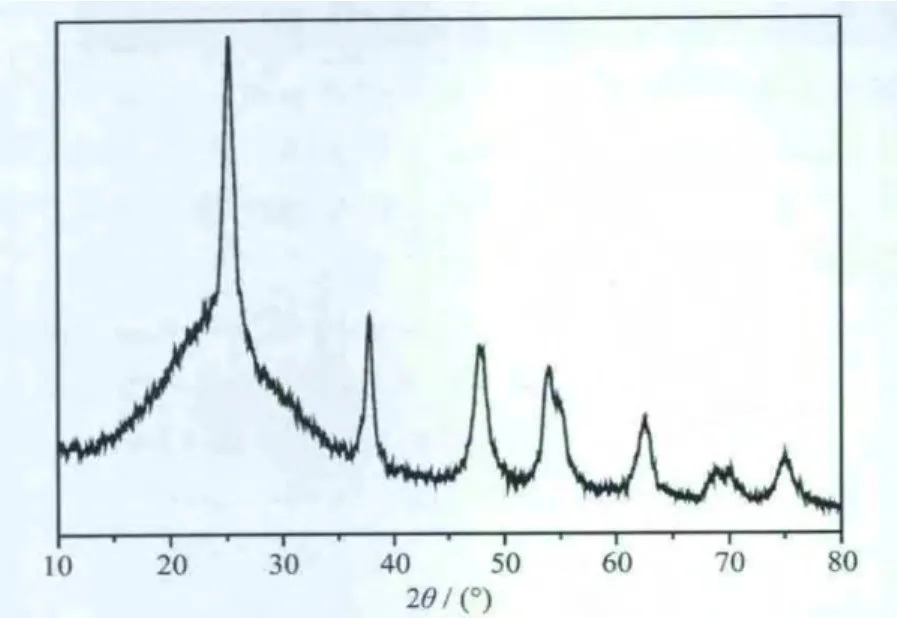
图2 干燥后TiO2纳米溶胶的XRD谱图Fig.2 XRD pattern of TiO2nano sol-gel after drying
2.2 仿蛛丝结构TiO2纤维表面形貌
图3是仿蛛丝结构TiO2纤维的表面形貌,其结构与天然蛛丝类似[13]。如图3所示,仿蛛丝结构TiO2纤维具有周期性纺锤节排布,周期为 (122.0±18.9)μm,纺锤节是由较细的连接处连接而成。其中,纺锤节的长度为(116.7±12.3)μm,纺锤节中心半径为(30.64±10.07)μm;连接处半径为(11.8±0.49)μm。

图3 仿蛛丝结构TiO2纤维光学显微镜照片Fig.3 Optical image of bioinspired TiO2fiber
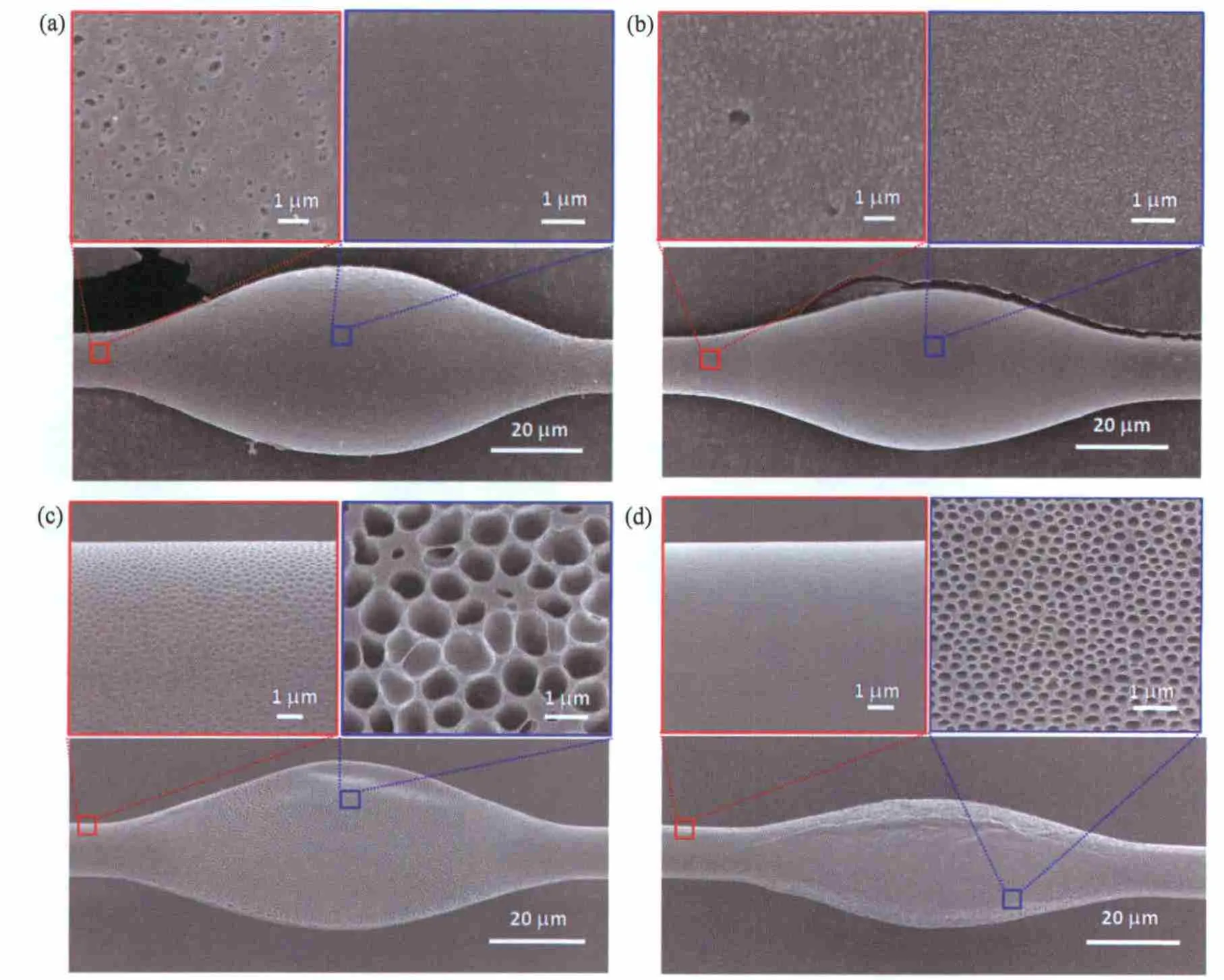
图4 (a)表面光滑的仿蛛丝PS纤维的连接处和纺锤节的扫描电镜图及其放大细节图;(b)光滑的表面包覆TiO2涂层后的PS/SiO2/TiO2纺锤节的逐级放大图仿蛛丝纤维的连接处和纺锤节的扫描电镜图及其放大细节图;(c)表面粗糙的仿蛛丝PS纤维的连接处和纺锤节的扫描电镜图及其放大细节图;(d)表面粗糙的包覆TiO2涂层后的PS/SiO2/TiO2纺锤节的逐级放大图仿蛛丝纤维的连接处和纺锤节的扫描电镜图及其放大细节图Fig.4 (a)SEM images and magnified images of smooth spindle knot and jiont of bioinspired PS fiber;(b)SEM images and magnified images of smooth spindle knot and jiont of bioinspired PS/SiO2/TiO2fiber after bioinspired PS fiber coating with TiO2sol-gel;(c)SEM images and magnified images of rough spindle knot and jiont of bioinspired PS fiber;(d)SEM images and magnified images of rough spindle knot and jiont of bioinspired PS/SiO2/TiO2fiber after bioinspired PS fiber coating with TiO2sol-gel
仿蛛丝结构TiO2纤维SEM的照片见图4。对于表面光滑的PS仿蛛丝结构纤维,无论纺锤节还是其连接部分,表面都较为光滑(图4a);在PS仿蛛丝结构纤维上分别涂覆SiO2保护层和TiO2层之后,其表面具有均匀的纳米颗粒涂层,颗粒直径约为20 nm,见图4b。而对于表面粗糙的PS仿蛛丝结构纤维,其连接处和纺锤节的微观结构则明显不同。如图4c所示,纺锤节表面粗糙,具有明显的蜂窝状结构,蜂窝孔径约为(910±290)nm;而其连接处的粗糙度较小,表面小孔孔径约为170 nm。当在PS仿蛛丝结构纤维上分别涂覆SiO2保护层和TiO2层之后,纺锤节上的粗糙结构依然保持,但其蜂窝状结构明显变小,孔径变为(270±70)nm。而其连接部分表面形貌则变得相对光滑(图4d)。结果表明,在涂覆SiO2/TiO2层后,纤维连接处和纺锤节具有不同的表面结构。这也预示着,微观结构不同的位置具有不同的浸润性。
2.3 不同表面的仿蛛丝结构TiO2纤维上的液滴运动和粘附行为
按照上述方法制备得到的两种仿蛛丝结构纤维被放置在相对湿度大于95%的环境中进行测试。凝结的小水滴在这些纤维上的运动由纤维接触角测量仪的CCD系统进行了实时的录像,如图5所示。在新制备的表面光滑的PS/SiO2/TiO2仿蛛丝结构纤维上(图5a),小水滴首先在纤维表面凝结,然后在整个纤维上(纤维连接处和纺锤节)形成液桥,同时纤维连接处的水通过液桥定向地向纺锤节运动,最后在纺锤节处形成较大的液滴。这种现象,同聚合物仿生纤维上液滴运动行为不同。在对弱亲水材料仿蛛丝纤维的液滴运动研究中[17],初始阶段,液滴在聚合物纤维上首先凝结为小水滴,然后小水滴在梯度表面发生定向运动。在本工作中,无论相对湿度如何调节,始终没有发现小水滴在纤维表面的定向运动,而是出现水滴以液桥形式从纺锤节两端到中心定向运动的现象。这是由于TiO2表面较为亲水,微小水滴在其表面是完全铺展的,随着时间推移,水滴在纤维表面是以相互连接的液桥存在;而聚合物表面则相对疏水,微小水滴在其上是以水滴状态存在的。当纤维经过紫外光照后,如图5b所示,纤维上水滴的运动形式基本没有变化,但是微小水滴的运动速度变快。对比图5a⑩和5b⑩,可以发现积累体积相当的水,经紫外光照后,所用时间明显缩短。当把紫外光照后的样品再用超声波处理后,水滴在其上运动速度变慢(见图5c),而运动方向没有变化。即,对于表面光滑的仿蛛丝结构TiO2纤维,无论紫外光照还是超声波刺激,其表面都是亲水的(平面TiO2的浸润性见图1a),微小水滴在纤维表面始终是从纺锤节两端到中心定向运动的。通过控制紫外光照和超声波刺激,可以调控液滴在纤维上的运动速度。

图5 用光学显微镜原位观察光滑结构的仿蛛丝结构TiO2纤维上水滴的运动情况Fig.5 Optical images of tiny water droplets moving on smooth bioinspired TiO2fiber
对于具有粗糙纺锤节的仿蛛丝结构TiO2纤维表面,小水滴首先在表面凝结聚集(图6a②~③),不断地向纺锤节方向运动(6a④~⑦),到一定阶段,不断生长的水滴被纺锤节两端粘附,见图6a⑧~⑩。对比图5a和6a发现,图6a的纤维上有小水滴出现。其原因是,具有粗糙结构的纤维表面,是相对疏水的(新制备粗糙 TiO2平面的 WCA 为(104.1°±0.7°),由于纺锤节的粗糙度远大于图1b中所示的情况,因此纺锤节的浸润性变化可能更大),故水滴在其上以液滴状存在。当该表面经过紫外光照后,变得非常亲水,此时水滴在其上是完全铺展的,纤维上水滴的运动行为变得与其在光滑纤维的模式相同,即水通过液桥形式从纺锤节两端向中心运动 (图6b)。再经过超声波处理后,液滴的运动行为又恢复为和新制备表面类似,即以小水滴的形式,首先从纺锤节两端向中心定向运动,然后被粘附在纺锤节两端,如图6c所示。即,对于表面粗糙的仿蛛丝结构
TiO2纤维,当其表面为亲水状态时,水滴会在其表面凝结形成液桥,从纺锤节两端向中心定向运动;当其表面疏水时,水滴首先在其表面凝结,然后从纺锤节两端到中心定向运动,直到被纺锤节两端粘附。通过控制紫外光照和超声波刺激,可以在纤维上实现液滴的定向驱动和粘附。
2.4 仿蛛丝结构TiO2纤维表面液滴运动模式分析

图6 用光学显微镜原位观察粗糙结构的仿蛛丝结构TiO2纤维上水滴的运动情况Fig.6 Optical images of tiny water droplets moving on rough bioinspired TiO2fiber
以上实验是在同样的温湿度环境下进行的,通过分析水滴在表面光滑和粗糙的仿蛛丝结构TiO2纤维表面的行为,水滴在纤维上之所以会出现不同的运动模式,是由于TiO2的光响应浸润性引起的。当纤维表面亲水时,微小水滴在纤维表面凝结,相互连接形成液桥,水以液桥形式从纺锤节两端到中心定向运动;当纤维表面疏水时,微小水滴在表面凝结,以水滴形式从纺锤节两端到中心定向运动,直到被粘附。总之,这两种不同的运动模式是与TiO2表面的粗糙结构和浸润性密切相关的。
2.5 仿蛛丝结构TiO2纤维液滴运动行为机理分析
在人造蜘蛛丝表面液滴定向运动研究中,液滴运动要受到由化学梯度引起的化学力 Fw=πR2γ(dcosθ/dx)由表面接触角滞后引起的滞后阻力FH=2Rγ(cosθr-cosθa)和 由 表 面 曲 率 半 径 梯 度 引 起 的Laplace力FL(FL只与纤维形状、液滴尺寸及液体表面张力有关,对于固定的研究体系,其值是不变的)这三方面的影响[16-18]。(式中,R为液滴半径,γ是液体的表面张力,θ为纤维上液滴的接触角,x表示液滴在纤维轴向上移动的距离;θr表示液滴在纤维表面的后退角,θa表示液滴在纤维表面的前进角。)
从表面能梯度的角度来说,水滴倾向于被驱动到表面能更高、更加容易润湿的区域。我们知道,表面能梯度可由表面化学组成和表面粗糙度的差别引起。根据 Wenzel公式:cosθ′=rcosθ,式中,θ′为表观接触角,θ为本征接触角,r为表面粗糙度。粗糙度的存在,增大了表面的浸润性,即,使得亲水表面更加亲水,疏水表面更加疏水。对于仿蛛丝纤维来说,表面粗糙的纺锤节比连接处具有更大的粗糙度。这种由表面粗糙度的差异引起的表面能梯度,表现为在表面为亲水状态时,纺锤节区域更加亲水;在表面为疏水状态时,纺锤节区域更加疏水。
其次,对于微小液滴在粗糙表面的运动,接触角滞后效应也是一个重要的影响因素。研究发现[13],湿后重构的蜘蛛丝的纺锤节和其连接处的表面结构是不同的,粗糙的纺锤节上具有不连续的三相接触线,FH较大,具有明显的接触角滞后现象,本研究中表面粗糙的仿蛛丝结构TiO2纤维也具有同样现象。因此,当纤维表面疏水时,水滴会被粗糙的纺锤节处粘附;而在其连接处,具有连续的三相接触线,FH较小,有利于液滴运动。
液滴方向性运动的另一个驱动力是由纺锤节的几何形状引起的FL,纺锤节可被认为是由两个相反的锥形体构成的。这样具有一定的曲率梯度的锥形体将产生FL,驱动液滴运动。这种压力差与表面浸润性无关,仅与几何结构有关,即,在高曲率处的FL大于其在低曲率处的FL,液滴的这种不平衡的FL是其从连接处到纺锤节运动的驱动力,对于几何形状固定的体系,FL是不变的。
对于光滑纤维表面,其连接处和纺锤节的粗糙度r差别较小,如图4所示。紫外光照和超声波处理后,Fw的方向始终是从纤维连接处指向纺锤节的;光滑表面的 θr和 θa分别为 43.21°和 65.07°,而紫外光照后,表面的接触角接近为0°,也就是说,紫外光照后FH变小,液滴更易于运动。
对于粗糙纤维表面,其连接处和纺锤节的粗糙度r差别较大(见图4)。r值越大,浸润性差异越大。粗糙度的差异,使得纺锤节较为疏水而连接处相对亲水,Fw的方向是从纺锤节(r值大的区域)指向纤维连接处(r值小的区域);参考粗糙表面,其θr和θa分别为60.05°和110.18°,接触角滞后比较明显。与天然蜘蛛丝类似,本研究中所用的纤维,在粗糙的蜂窝状的纺锤节表面具有不连续的三相接触线,接触角滞后效应明显,不利于液滴向纺锤节运动。当紫外光照后,整个纤维表面变得非常亲水,无论纺锤节还是连接处 (见图1和6),Fw的方向则变为从纤维连接处指向纺锤节的;而纤维为亲水状态时,其三相接触线是连续的,接触角滞后阻力FH变小,因此,纤维上液滴的运动状态是从连接处向纺锤节不断推进的。经过超声波处理后,纤维表面又恢复到原先的状态。
3 结 论
本研究受天然蛛丝方向性集水现象的启发,制备了具有浸润响应性的仿蛛丝结构TiO2纤维。通过控制紫外光照、超声波以及纤维表面的微观结构,改变了纤维表面浸润性,可以实现微小水滴在其上的定向运动与粘附。研究发现,当TiO2纤维表面为亲水状态时,无论纺锤节光滑还是粗糙,水通过液桥形式从纺锤节两端到中心定向运动;而当TiO2纤维表面为疏水状态时,水滴会首先从纺锤节两端到中心定向运动,然后被纺锤节两端粘附。这一研究将会为今后设计非接触式的、远程定点式定向驱动或捕获液滴材料和器件提供帮助。
[1]Chaudhury M K,Whitesides G M.Science,1992,256:1539-1541
[2]Bain C D,Burnett-Hall G D,Montgomerie R R.Nature,1994,372:414-415
[3]Domingues dos Santos F,Ondaruhu T.Phys.Rev.Lett.,1995,75:2972-2973
[4]Sumino Y,Magome N,Hamada T,et al.Phys.Rev.Lett.,2005,94:068301
[5]Ichimura K,Oh S K,Nakagawa M.Science,2000,288:1624-1626
[6]Moumen N,Subramanian R S,McLaughlin J B.Langmuir,2006,22:2682-2690
[7]Grunze M.Science,1999,283:41-42
[8]Burns M A,Mastrangelo C H,Sammarco T S,et al.Proc.Natl.Acad.Sci.U.S.A.,1996,93:5556-5561
[9]Gau H,Herminghaus S,Lenz P,et al.Science,1999,283:46-49
[10]Lai Y H,Yang J T,Shieh D B.Lab Chip,2010,10:499-504
[11]Shastry A,Case M J,Bohringer K F.Langmuir,2006,22:6161-6167
[12]Sessoms D,Belloul M,Engl W,et al.Phys.Rev.E,2009,80:016317
[13]Zheng Y M,Bai H,Huang Z B,et al.Nature,2010,463:640-643
[14]Agranovski I E,Braddock R D.AIChE J.,1998,44:2775-2783
[15]Daniel S,Chaudhury M K,Chen J C.Science,2001,291:633-636
[16]Bai H,Tian X L,Ju J,et al.Adv.Mater.,2010,22:5521-5525
[17]Bai H,Ju J,Sun R Z,et al.Adv.Mater.,2011,23:3708-3711
[18]Tian X L,Bai H,Zheng Y M,et al.Adv.Funct.Mater.,2011,21:1398-1402
[19]Dong H,Wang N,Wang L,et al.ChemPhysChem,2012,13:1153-1156
[20]Li C,Guo R W,Jiang X,et al.Adv.Mater.,2009,21:4254-1258
[21]Hou Y P,Gao L C,Feng S L,et al.Chem.Commun.,2013,49:5253-5255
[22]Tasbihi M, Štangar U L,ernigoj U,et al.Photochem.Photobiol.Sci.,2009,8:719-725
[23]Sánchez B,Coronado J M,Candal R,et al.Appl.Catal.B:Environmental,2006,66:295-301
[24]Wang L,Ji X Y,Wang N,et al.NPG Asia Mater.,2012,4:e14
[25]Sakai N,Wang R,Fujishima A,et al.Langmuir,1998,14:5918-5920
[26]Sakai N,Fujishima A,Watanabe T,et al.J.Phys.Chem.B,2003,107:1028-1035
[27]Kamei M,Mitsuhashi T.Surf.Sci.,2000,463:L609-L612
