基于ICP算法的三维激光扫描点云数据配准方法
2014-07-10亢瑞红甘梦仙
亢瑞红,胡 洪,甘梦仙
(1.池州学院 资源环境与旅游系,安徽 池州 247000;2.中国矿业大学 环境与测绘学院,国土环境与灾害监测国家测绘局重点实验室,江苏 徐州221008;
基于ICP算法的三维激光扫描点云数据配准方法
亢瑞红1,胡 洪2,甘梦仙1
(1.池州学院 资源环境与旅游系,安徽 池州 247000;2.中国矿业大学 环境与测绘学院,国土环境与灾害监测国家测绘局重点实验室,江苏 徐州221008;
数据配准在三维激光扫描点云数据处理中占有非常重要的地位,最近点迭代算法(ICP)是点云数据处理中点云数据配准的经典的高水平数学方法。文章回顾了配准方法的研究背景,重点阐述了ICP算法的原理和计算步骤。通过三维激光扫描数据的采集,运用ICP算法对点云数据进行配准,具体实验结果证明该方法的有效性。
ICP算法;点云数据配准;三维激光扫描;数据采集
利用三维激光扫描获取的点云进行三维模型重建,需要经过扫描物体获取点云数据、点云数据预处理、多测站点云数据配准、三维格网建立、三维模型后处理、纹理贴图等过程。在建立物体三维立体模型中,数据配准是一项十分关键十分重要的数据处理内容,其配准的精度直接影响着建立的模型的精度。数据配准的方法有很多,其中最为经典的为迭代最近点算法(ICP)。
1 点云数据配准
点云配准问题类似于数学上的映射问题,即找到两相邻点云数据集合间的一种对应关系。假设两个点云集合M、N分别为两个不同测站下扫描得到的点云数据集合,点Pi∈M;点Pj∈N;且Pi、Pj为同一空间上的点在不同测站下扫描所得的点。点云配准就是让所有来自不同测站的点云数据中代表物体表面同一点组成的点对 (Pi,Pj),满足Pi=R Pj+T成立,其中R为旋转矩阵,T为平移矩阵。通过此刚体变换可将一个坐标系下的点云数据转换至另一坐标系下。从描述中可以看出,点云配准工作主要分成两大步:确定同名点对、求解旋转矩阵R及平移矩阵T。除了平移和旋转,配准的依据还有仿射变换(平行线映射为平行线)、投影变换(直线映射为直线)、曲线变换(直线映射为曲线)等。
点云数据配准是将不同坐标下的大量点云统一坐标系的过程,在数据处理中十分关键。国内同济大学的郑德华[1]对三维激光扫描数据的整体流程进行了详细叙述,并提出多幅影像数据整体配准方法MVS,对表面提取特征有一定研究。胡少兴、查红彬[2]等人提出利用点云数据的轮廓特征进行多视点几何数据配准研究。山东大学的张政[3]就计算机专业角度对点云数据的配准算法进行相关研究,把配准方法分为全局配准方法和局部配准方法,并对算法的收敛速度进行研究。李必军[4]等人研究了从激光扫描数据中进行快速提取建筑物特征研究,并取得较好效果。黄磊[5]等人利用激光扫描反射光的强度信息对建筑物立面信息进行提取与分类。南京师范大学的张凯[6]将空间配准分为数据拼接、整体匹配和数据融合三个步骤,他认为进行数据配准先进行空间划分,有利于提高配准效率。
2 迭代最近点算法ICP
ICP算法最早是由Besl、Mckay[7]以及Chen在1992年提出的,是一种基于四元数的点集到点集(PSTPS)的配准算法。Faugeras在1986年最早提出用四元数进行配准,1987年Horn、Arun[8]等人同样提出运用四元数法进行点集对点集PSTPS配准方法。1999年J-YL ai[9]等人对有部分重叠区域的点云数据提出三点到三点、三球对三球、三平面到三平面的配准方法。1996年David A Simon[10]在医学扫描点云数据处理中着重研究了ICP算法,以及对提高迭代速度的研究,并对配准后精度做了一定的分析。2004年Niloy J.Mitra引入二阶的曲率特征,并提出基于二次距离框架进行配准的方法,大大的提高了ICP算法收敛速度。其中1992年Besl和Mckay提出的迭代最近点法ICP(Iterative Closest Point)成为最具代表性的迭代算法,采用搜索或牛顿迭代寻找同名点,并开始尝试配准后建立三维模型。
ICP算法的基本思想是:先假设一个初始位姿估计,从一个视角的测量点集中选定一定数量的点,从另一视角的测量点集中寻找这些点对应的最近点点集,通过严密的结算过程求得一个变换,使对应点点集间的距离最小化,通过迭代计算,直到满足收敛条件,这时目标函数值不再发生变化,迭代过程终止。
假设给定的含有n个坐标点的三维空间点云集合P、Q;

两点云集合的重叠区域为Ω,将P、Q运用ICP配准,ICP算法处理过程如下:
(1)定义一个配准方法目标函数(或称距离函数)
其中,k为对应点个数,R、T分别为旋转矩阵和平移矩阵,d为点集P中的第i个点到Ω上最近点的距离偏差。
设置迭代点集初值为:P0=R0Pi+T0
(2)由点集Pi中的点,在曲面Ω上采用搜索算法计算对应最近点点集Ck,计算目标函数值为fk;
(3)利用平移和旋转矩阵计算,生成一个新的点集Ck+1,计算目标函数值为fk+1;
(4)设置一个阈值τ,当计算出的目标函数值的变化小于预设的阈值τ时,迭代过程停止,否则,重复2-3步骤,停止迭代的判断准则为:
(5)根据迭代产生的最优的旋转矩阵R和平移矩阵T,对点云进行刚体变换,得到最终配准结果。
ICP算法中最为经典的最近点搜索法当是Point to Point最近点搜索法,此方法运用kd-tree的方法实现最近点搜索。Blais G提出 Point to Projection随机搜索方法,过透视点向源曲面一点方向的投影线与目标曲面的交点作为搜索的最近点;2004年Niloy J.Mitra提出Point to Plane方法,根据源曲面上点到目标曲面的切平面的法线与目标曲面的交点作为最近点 ;Soon-Yong Park提出了Contractive Project Point最近点搜索方法。对于迭代收敛速度方面,Besl和Mckay为加快迭代收敛速度,提出了 ICP加快算法 AICP(Accelerated Iterative Closest Point),采用直线型逼近法和抛物线逼近法两种线搜索方法。此外还有不动点迭代,加速牛顿迭代,变分迭代,梯度方向逼近,逐次超松弛迭代等方法,其中梯度方向逼近方法加快迭代的同时可保证算法的收敛性。
3 实验算例
3.1 点云数据采集
运用三维激光扫描系统进行数据采集的工作流程分为:现场踏勘、测站设计、扫描实施等。在扫描之前首先要设置扫描参数,包括输入温度、气压、已知测站点坐标、仪器高等;设置扫描间隔;在软件界面上通过内置数码相机实时显示目标影像信息,在影像上选择扫描区域,即可启动扫描。扫描采集点云数据流程如图1所示。
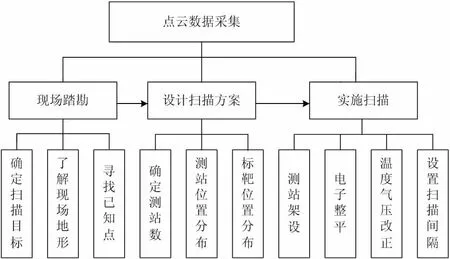
图1 点云数据采集流程图
为了分析点云数据配准的效果,本次实验采用Trimble GX200三维激光扫描仪,以某大学的北大门为实验扫描对象,获取两幅北大门的扫描数据影像。实验中共扫描两站,其中测站一距离扫描对象约50m,获得含有77225个点的原始点云数据影像,如图2所示;测站二距离扫描对象约为60m,获得含有85015个点的原始点云影像,如图3所示。

图2 测站一原始点云影像
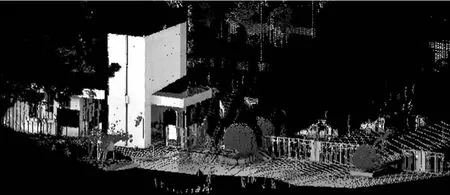
图3 测站二原始点云影像
3.2 点云影像基于ICP配准
配准初始设置参数是否合理,直接影响配准的实际效果,经反复验证,当距离阈值取τ=0.000006时,配准结果较为理想,此时最近点距离的标准差为0.001125m。在实际计算中,若选取的τ使得点云数据匹配失败,可适当放松距离约束阈值。配准后的点云效果图如图4所示。为验证基础ICP配准方法的有效性,图5为基于“三点法”进行配准后的结果,其配准的精度为0.082163m。由此看出,基于ICP算法的配准优势比较明显,精度更高,效果更好。

图4 两测站基于ICP配准后点云影像
图5 三点法两测站配准后点云影像
4 结论
针对地面三维激光扫描点云数据的配准问题,提出采用ICP算法对两测站的点云数据进行配准。通过寻求合适的距离阈值,使配准的速度和精度达到最佳。经过对比其他配准方法,实验结果表明,当距离阈值取值合理时,采用ICP算法进行点云数据的配准是较为准确和有效的。而配准参数设置的合理与否很大程度上依赖于作业人员的专业知识和数据处理经验,如何改进ICP算法使之在点云数据配准中有更好的应用,须对ICP算法的收敛速度、可靠性和稳定性作进一步的研究。
[1]郑德华.三维激光扫描数据处理的理论与方法[D].上海:同济大学,2007.
[2]胡少兴,查红彬.利用轮廓特征的多视点几何数据配准[J].系统仿真学报,2007,19(6):1307-1311.
[3]张政.点云数据配准算法研究[D].济南:山东大学,2008.
[4]李必军,等.从激光扫描数据中进行建筑物特征提取研究[J].武汉大学学报:自然科学版,2003,28(1):65-70.
[5]黄磊,等.基于激光扫描回光强度的建筑物立面信息提取与分类[J].武汉大学学报:自然科学版,2009,34(2):195-198.
[6]张凯.三维激光扫描数据的空间配准研究[D].南京:南京师范大学,2008.
[7]Besl P Makay.A Method for Registration of 3D Shapes[J].IEEE Transactions on Pattern Analysis and Ma-chine Intelligence,1992,14(2):239-256.
[8]Horn BKP.Closed-form Solution of Absolute Orientation Using Unit Quaternions[J].Journal of the Optical Society of America,1987(4):629-642.
[9]J-Y Lai,C-Yao.Registration and Data Merging for Multiple Sets of Scan Data[J].International Journal of Advanced Manufacturing Technology,1999(15):54-63.
[10]David A.Simon.Fast and Accurate Shape-based Registration[D].Pennsylvania:Carnegie Mellon University,1996.
[责任编辑:桂传友]
TP319
A
1674-1104(2014)03-0068-03
10.13420/j.cnki.jczu.2014.03.020
2013-08-21
池州学院研究生引进启动项目(2011RC026)。
亢瑞红(1987-),女,山东聊城人,池州学院资源环境与旅游系助教,硕士,主要研究方向为三维激光扫描及测绘数据处理。
