基于空基拦截器的高超声速飞行器防御拦截*
2014-07-10熊俊辉唐胜景郭杰
熊俊辉,唐胜景,郭杰
(北京理工大学 宇航学院 飞行器动力学与控制教育部重点实验室,北京 100081)
0 引言
临近空间是指高度为20~100 km高度范围内的空域[1],随着吸气式冲压发动机技术的日益成熟,临近空间特殊的战略价值倍受关注,临近空间高超声速飞行器尤其是高超声速巡航飞行器获得快速发展[2]。另外,其他的飞行器也将临近空间高度范围作为飞行轨迹的过渡阶段,如助推上升与再入返回的弹道导弹、可重复使用的往返运载飞行器等。无论是临近空间的过渡型高超声速飞行器还是新型的临近空间高超声速巡航飞行器,针对其的防御技术一直是空间对抗技术的重点和难点。
针对临近空间高超声速飞行器目标,现有的防御体系主要由传统的地基防空导弹系统和针对再入式导弹的反导系统构成[3]。其他的一些新概念武器,如激光武器拦截、天基武器系统等还处于理论探索阶段,技术和成本上短时间无法形成现实的防御力量[4]。除了上述方案,还有另一种具有发展潜力的防御方案就是空基拦截器系统。事实上,美国、以色列、德国等已经开展了空基拦截器技术的研究,主要用来拦截助推段的导弹或火箭[5-6]。空基拦截器方案的优势主要在于,基于成熟的空空导弹发展的拦截器的成本低和研发周期短。针对临近空间高度范围内的飞行器目标,考虑现有防御体系的薄弱,有必要提出具有发展潜力的空基拦截器方案,探讨其关键技术与难点,并进行初步的可行性分析。
1 目标特性分析
本文考虑的高超声速飞行器是在临近空间高度范围内具有一定滞空时间的飞行器,包括过渡型和巡航型的临近空间飞行器。过渡型的高超声速飞行器主要以助推上升段与再入段的弹道导弹为代表,这类飞行器的特点主要有以下几点:
(1) 飞行高度跨度大
这类飞行器通常具有很大的纵向速度,横向速度小,飞行高度可以从地面至大气层外。
(2) 临近空间内的飞行时间短
对于Ma>5的高超声速飞行器,100 km高度内的再入或上升时间一般小于60 s。
(3) 飞行速度高
(4) 机动力较弱
由于临近空间大气稀薄,可用气动过载较小,在这一空域通常不作机动或变轨。
巡航型高超声速飞行器主要指在临近空间某高度以较稳定的速度飞行,这类飞行器主要指近年来发展的吸气式高超声速巡航飞行器,其主要特点包括以下4个方面。
(1) 典型高度飞行
由于低空大气密度大使阻力较大,而过高的飞行高度又不能给发动机提供足够的空气,采用吸气式超燃冲压发动机的高超声速飞行器较适合于约30 km高度巡航飞行[7]。
(2) 临近空间内的飞行时间较长
(3) 高超声速巡航飞行
(4) 机动力较弱
临近空间气体稀薄及吸气式发动机限制了飞行器的气动过载,而巡航段的飞行器也不易实现直接力控制,因此,其机动能力较弱。
相比于低空飞行器,临近空间内的高超声速飞行器具有速度高的优点,同时也带来了稀薄气体引起的可用过载低的缺点,尤其是吸气式冲压发动机的进气道设计限制了其大攻角飞行。空基拦截器防御方案可以将大于25 km高度的空域作为有效拦截区域,利用目标在这一空域变轨或机动力较弱的特点,发挥拦截器机动性和灵活性的优点。这也是空基拦截器防御方案的一个优势所在。
2 空基拦截器防御方案
空基拦截器方案是针对临近空间高超声速飞行器提出的一种潜在防御方案,该方案建立在预警系统可以探测并跟踪目标的前提下。对于临近空间高超声速巡航飞行器,主要考虑在目标的巡航段实施拦截[8]。和空空导弹系统类似,拦截方案的流程如图1所示。相比地基防空导弹系统,该方案有以下几个优点:
(1) 通过载机携带至一定高度,有效提高拦截器作战高度及射程;
(2) 载机快速机动及作战灵活性提高拦截器的适用性;
(3) 基于中远程空空导弹改进的拦截器具有研究成本较低、开发周期短的优势;
(4) 空基拦截器更有利于实现迎击或前向拦截2种小速度比拦截制导方法。
空基拦截器基于空空导弹技术,涉及的知识学科主要包括空气动力学、导航与控制理论、结构力学、计算与信息科学及燃料与弹药,分别对应了本方案的涉及的技术内容,如图2所示。

图1 空基拦截器方案流程Fig.1 Process of air launched interceptor defense scheme
3 关键技术与难点
空基拦截器继承了成熟的空空导弹技术,相比于传统的地基防空导弹,主要涉及以下关键技术:
(1) 远程预警、目标探测与跟踪技术
无论是地基防空导弹系统还是空基拦截器系统,都要求探测并跟踪到目标,尽可能地增加防御系统的反应时间。大高度、速度快给预警与跟踪增加难度,这是各防御方案实施的前提。
(2) 空基拦截器的总体设计
针对临近空间高超声速飞行器的目标特性及作战环境,并考虑机载携带要求,需要对拦截器总体设计,使拦截器满足高速、大机动、大作战高度、大射程及小体积等要求。
(3) 高超声速飞行器的拦截制导方法
无论对于临近空间高超声速巡航飞行器还是再入式飞行器,都有可能出现拦截器速度小于目标速度的情况,此时传统的尾追方法无法截获目标,需要研究其他的拦截制导方法,如迎击拦截(head-on impact)、前向拦截[9](head pursuit)制导方法。而这2种制导方法在实际应用中还存在不少技术困难,特别是前向拦截的后视导引头或探测器技术。
(4) 零脱靶量的末制导律设计与实现
目前常见制导律的设计多数是针对尾追式的制导方法,且多数采用破片杀伤回避直接碰撞即可满足要求。对于要求直接碰撞的高超声速飞行器交会问题,需要设计精确的末制导律,使其脱靶量接近0,同时满足对目标机动和系统摄动的鲁棒性要求。
(5) 高精度复合控制技术
临近空间空气稀薄,拦截器的气动舵不足以提供拦截器的大机动过载,现阶段通常考虑气动力/直接力复合控制方法。高速、高空状态下的直接力与气动力耦合、气动力与有限的直接力的分配策略等问题是精确复合控制的关键。
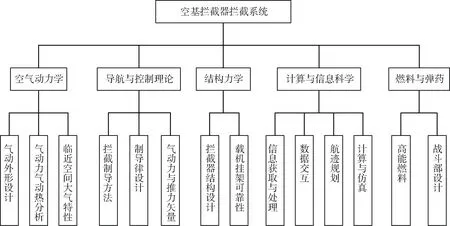
图2 空基拦截器系统方案知识脉络Fig.2 Technical sketch of air launched interceptor defense scheme
(6) 拦截器的爬升轨迹在线生成
对高超声速的时敏性目标,一个主要难题在于如何增加拦截器的反应时间。除了提高预警系统的探测与跟踪目标能力外,缩短拦截器从载机高度进入末制导启控点的飞行时间是另一种途径。虽然目前的离线轨迹优化方法理论和工程已经比较成熟,但是对于临近空间高超声速飞行器目标的拦截,轨迹优化的实时性还不能达到要求。一种被认为可能的方法是通过离线轨迹优化获得参考轨迹,任务中根据获取的目标信息进行轨迹的重规划。
4 运动学分析
为了初步分析空基拦截器策略的可能性,建立简化的高超声速飞行器拦截的运动学模型并进行仿真。拦截器与目标的相对运动关系如图3所示。

图3 拦截器与目标的相对运动关系Fig.3 Sketch of relative motion
图3中,r为拦截器与目标距离;v,vT分别为拦截器与目标的速度;q为目标视线角;η,ηT为拦截器与目标速度矢量前置角;σ,σT为弹道角及目标航向角,得到拦截的相对运动方程[10]为
(1)
根据高超声速飞行器的目标特性,分别考虑迎击和前向2种拦截制导方法。迎击拦截的比例导引关系方程为
(2)
而前向拦截的比例导引关系方程可以通过交会关系推导得到[11],即
(3)
由相对运动方程与导引关系构成了拦截的运动模型。仿真中假设目标以vT=1 700m/s作等速圆弧机动飞行,目标nT=5,拦截器从载机15km的高度发射,并以vT=1 360m/s等速进行拦截,案例中比例系数均取K=5,其他参数初始值按典型值设定。拦截器的需用过载是表征拦截可行性的一项重要技术指标。迎击、前向拦截轨迹图及拦截器需用过载分别如图4,5所示。
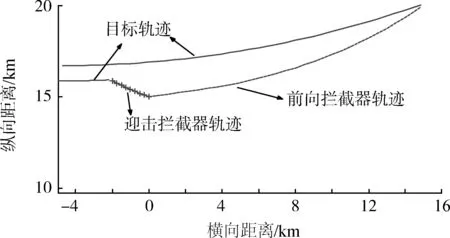
图4 迎击拦截与前向拦截轨迹Fig.4 Trajectory of head-on impact and head pursuit engagement
图5 迎击拦截与前向拦截需用过载曲线Fig.5 Required overload of interceptor
从仿真结果可以看出,当拦截器速率小于目标速率时,给定合适的末制导初始条件下迎击、前向拦截2种制导方式理论上可以实现交会。其中前向拦截的拦截器的需用过载较小,而迎击拦截由于相对速度较大导致需用过载在交会末段过早地趋于发散。虽然前向拦截对需用过载要求较低,但由于后视导引头或探测技术、拦截器的外形与结构等限制目前还没有工程应用[12]。对于迎击拦截方式,从制导方法及末制导律方面,决定空基拦截器策略是否可行的必要条件之一是拦截器的大机动能力,除此之外,还取决于满足大机动过载的结构与材料、目标远程探测与跟踪及高精度复合控制等一系列关键技术。
5 结束语
高超声速飞行器,尤其是临近空间高超声速巡航飞行器对目前的地面防空系统提出了越来越高的技术要求。本文针对临近空间内的飞行器,探索了一种具有发展潜力的基于空基拦截器的防御策略,分析了该防御策略涉及的部分关键技术与难点,并从拦截器的制导方法与导引规律方面对高超声速飞行器小速度比拦截的可行性进行了初步分析,为该防御策略的后续研究提供思考。
参考文献:
[1] 肖存英. 临近空间大气动力学特性研究[D]. 北京:中国科学院研究生院, 2009.
XIAO Cun-ying. Researches on the Dynamics of the Atmosphere in the Near Space [D]. Beijing: Graduate University of Chinese Academy of Sciences, 2009.
[2] 范金荣. 发展中的高超声速武器及战略意义[J]. 现代防御技术, 2006,34(2):1-5.
FAN Jin-rong. The Hypersonic Weapons in Development [J]. Modern Defence Technology, 2006,34(2):1-5.
[3] 熊俊辉, 唐胜景. 高超声速巡航飞行器防御方案探讨[J]. 飞航导弹, 2012(1): 13-15.
XIONG Jun-hui, TANG Sheng-jing.Discussion on Defense Methods of Hypersonic Cruise Vehicle [J]. Winged Missiles Journal, 2012 (1): 13-15.
[4] 薛海中. 新概念武器[M].北京:航空工业出版社, 2009.
XUE Hai-zhong. New Concept Weapons [M]. Beijing: Aviation Industry Press, 2009.
[5] 赵鸿燕, 王丽霞. 网络中心机载防御系统发展概况[J].飞航导弹, 2009(6):40-46.
ZHAO Hong-yan, WANG Li-xia. Development of NCADE Program [J]. Winged Missiles Journal, 2009(6):40-46.
[6] 钱锟. 美国发展低成本空基反导武器系统[J]. 现代军事, 2009(1):50-54.
QIAN Kun. Low Cost Air-Launched Anti-Missile Weapon System of USA [J]. CONMILIT, 2009(1):50-54.
[7] XIONG Jun-hui, TANG Sheng-jing, GUO Jie. Approach of Aircraft Configuration with Free-Form Surface Design Based on Reverse Engineering[C]∥2011 Emeit, 2011(6):2757-2761.
[8] 呼卫军, 周军. 临近空间飞行器拦截策略与拦截武器能力分析[J]. 现代防御技术, 2012, 40(1):11-15.
HU Wei-jun, ZHOU Jun. Analysis of the Interception Strategy of the Near Space Vehicle and Capability of the Interception Weapon [J]. Modern Defence Technology, 2012, 40(1):11-15.
[9] Shima Tal, ODED M. Head Pursuit Guidance [J]. Jounal of Guidance, Control and Dynamics,2007,30 (5): 1437-1444.
[10] 钱杏芳, 林瑞雄, 赵亚男. 导弹飞行力学[M]. 北京:北京理工大学出版社, 2006.
QIAN Xing-fang, LIN Rui-xiong, ZHAO Ya-nan. Flight Dynamics of Missiles[M]. Beijing:Institute of Technology Press, 2006.
[11] PRASANNA H M, GHOSE D. Retro-Proportional-Navigation: A New Guidance Law for Interception of High-Speed Targets [J]. Journal of Guidance, Control, and Dynamics, 2012, 35(2):377-386.
[12] ODED M, Shima Tal. Head Pursuit Guidance for Hypervelocity Interception[C]∥AIAA Guidance, Navigation, and Control Conference and Exhibit 2004, AIAA 2004-4885.
