舵回路动态特性的频域辨识
2014-07-10裴少俊顾冬雷
裴少俊,顾冬雷
(南京模拟技术研究所,江苏 南京 210016)
0 引言
舵回路是飞行器中最重要的执行机构。飞行控制律的设计必须获取舵回路动态特性的精确模型[1]。利用机理建模的方法,需要涉及到舵回路的各个环节,过程复杂、工作量大而且不易获得准确的动态特性[2]。利用阶跃响应进行相关的超调、过渡时间等参量的测量去求取传递函数,方法比较粗略,无法获取精细的信息[3]。利用时域辨识方法,由于其拟合过程数据加权本质上更加偏重低频部分,对高频特性辨识得不够准确,无法全面反映对象的动态特性[2-4]。而本文利用频域辨识方法,则可以全面地获取所需要的频段动态特性,提升高频特性精度,为高质量的飞行控制律设计提供必要的信息[4-5]。频域辨识方法一般分成确定模型结构、数据采集、参数辨识、数据校核等步骤,构成一个完整的整体[2,4,6]。本文以此方法针对某型无人直升机的舵回路特性进行了相关研究工作,取得了较好的效果。
1 辨识建模
1.1 模型结构
辨识建模首先需要获取模型结构。一般地,辨识的模型结构主要抓住系统的关键特性即可[2,4],而无须过多顾及细节。辨识参数一般均为集总参数,除了反映系统关键特性外,也包含了次要特性的影响因素。
由图1所示为某型号无人直升机舵回路基本原理,控制回路通过比较位置设定值和反馈值之间的关系求取控制信号,驱动电机运动,达到位置伺服控制的效果。通过该框图,可以得到如下的简化传递函数[7]:

(1)
式中:Kp为比例控制系数;Km为静态增值;b为机械特性斜率;J为转动惯量;kf为电位器的反馈系数。e-τ不仅反映了系统时延效应,而且一些非线性特性也可用时延来等价表示[2]。
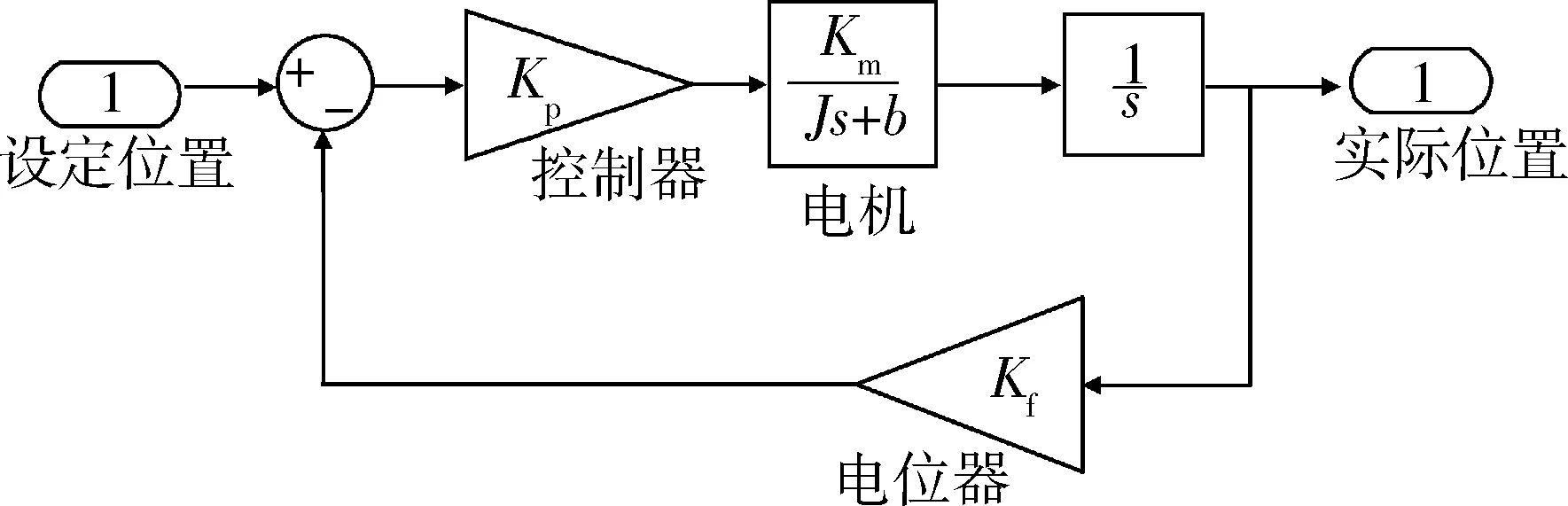
图1 舵回路机理示意图Fig.1 Schematic diagram of servo loop mechanism
1.2 数据采集
Kp为仅有的控制参数,对于这种只有一个可调变量的单回路系统,手动调整一般可以得到较优的动态特性[7]。因此可以通过手工调节Kp值,获取较为满意的响应特性,然后针对整个回路的输入输出进行数据采集,辨识得到舵机特性参数,获取舵机的传递函数。舵回路的传递函数实际仅取决于4个集总参数,即KpKm,J,b,KpKmKf。由于Kf=1,所以实际所需确定的参数为3个。辨识获取舵机相关参数后,可以调整Kp值实现最优化。
在形成了闭环控制后,可以同步采集伺服舵机控制的设定值和舵机杆位移反馈值,形成输入输出对,以供辨识建模。首先需要对动态对象施加激励信号,激发建模所感兴趣频段的特性信息,方可加以辨识[4-5]。加入激励信号有多种方式,一般以逐步增加频率值的扫频信号模式最为合适,可覆盖所感兴趣的频段[8-9]。
以直升机的横滚舵回路为例,在输入端施加扫频信号,以充分激发其在各个频率段的动态特性。为了更加符合真实带载情况,一般地舵回路装载到直升机上后进行数据采集[6,10]。由于人的手动操纵频率可以达到4 Hz左右,覆盖了飞行控制感兴趣的舵回路特征频段,且手动激励信息比计算机生成的扫频信号更加丰富,辨识效果更好,因此采用手动数据采集的方式[2,4,6]。通常为了信息更加全面,可以将几组数据组合在一起使用[2,4],但对于舵回路这种特性较为单一的对象,一组数据就可以进行辨识了。舵回路行程量归一化后输入输出信号如图2所示。
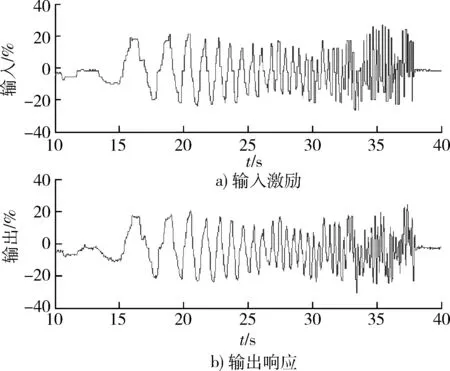
图2 横滚通道输入激励和输出响应Fig.2 Input and output response of roll channel
1.3 频域辨识
获取输入输出数据后,可以利用功率谱方法[11]得到如图3所示的频率响应波特图以及输入输出的相干函数。

图3 舵回路频率响应Fig.3 Frequency response of servo loop
一般地,相干函数值大于0.6的频段表明频谱特性具有较好的置信度,可以用于辨识建模[2,4,6,10]。由图3中的相干函数值可知,该舵回路动态特性从低频段开始直到27 rad/s的频率均可用于辨识建模。
以式(1)的模型结构,利用图3中波特图的频率响应值进行最小二乘法拟合[1-2,12],可得到如下的归一化传递函数:

(2)
该传递函数和实验所得到的频率响应波特图的贴合度如图4所示,可见直至27 rad/s的频率点,均有良好的一致性。

图4 传递函数拟合图Fig.4 Transfer function fitting diagram
1.4 数据校核
为了检验所得到模型的准确性,最终需要在时域中检验其预测能力。为了更好地反映模型的预测能力,数据校核采用的信号形势和辨识激励采用的信号形式不同[13]。此处采用偶极子输入信号作为校验信号。
由图5可见,辨识模型针对校核输入数据的响应几乎和实际的舵回路响应重合,模型预测精度达到了95%以上,可以用于控制律设计和仿真试验。

图5 时域预测校验Fig.5 Time-domain prediction verification
2 结果分析
直升机具有横滚、俯仰、总距、偏航4个操纵通道。其中,横滚、俯仰、总距通道均采用同样的丝杆传动的舵机,而偏航通道采用变速箱传动的方式。所得到的辨识结果如表1所示。

表1 直升机舵回路辨识结果Table 1 Results of helicopter servo loop identification
由表1可见,横滚、俯仰、总距通道舵回路动态特性比较接近,其中纯时延、阻尼、静态增益值的差异可以忽略,这是因为它们采用同一种舵机,其根本的动态特性是一致的。由于它们连接着不同的通道,而不同通道的负载是不一样的。为了准确获取各个舵回路在实际工作情况下的动态特性,扫频工作是利用操纵手手动飞行,在实际工作情况下获取的。它们带宽的差异,正反映了各个通道实际工作时外部条件的差异。至于偏航舵回路的舵机结构和前述通道有相当显著的差异[6,10],其动态特性和另外3个回路差异比较明显也是合理的。
3 结束语
频域辨识方法操作简便,效果切实,尤其能够比较精确地获取动态对象的高频特性,是一种行之有效的工程化建模方法。本人将该方法用于舵回路特性的辨识,快速准确地获取了舵回路的传递函数,支持了后续飞行控制设计工作的展开。
参考文献:
[1] KLEIN V,MORELLI E A.Aircraft System Identification,Theory and Practice[M].Virginia:American Institute of Aeronautics and Astronautics, 2006.
[2] METTLERB .Identification Modeling and Characteristics of Miniature Rotorcraft[M].Boston: Kluwer Academic Publishers, 2003.
[3] HAMEL P G,KALETKA J.Advances in Rotorcraft System Identification[J]. Progress in Aerospace Sciences, 1997,33(5):259-284.
[4] METTLER B, TISCHLER M B,KANADE T.System Identification Modeling of a Small Scale Unmanned Rotorcraft for Control Design[J]. Journal of the American Helicopter Society, 2002, 47(1):50-63.
[5] TISCHLER M B.System Identification Requirements for High-Bandwidth Rotorcraft Flight Control System Design[J]. Journal of Guidance, Control Dynamics, 1990,13(6):835-841.
[6] TISCHLER M B,CAUFFMAN M G.Frequency-Response Method for Rotorcraft System Identification: Flight Application to BO-105 Coupled Rotor / Fuselage Dynamics[J]. Journal of the American Helicopter Society, 1992(37):3-17.
[7] DOYLE J, FRANCIS B,TANNENBAUM A. Feedback Control Theory[M]. New York:Macmillan,1992.
[8] MORELLI E A.Optimal Input Design for Aircraft Instrumentation Systematic Error Estimation[C]∥ AIAA.1991,PAPER 91-2850: 91-102.
[9] GUPTA N K,HALL W E Jr.Input Design for Identification of Aircraft Stability and Control Derivatives[R]. NASA CR-2493, 1975.
[10] FLETCHER J W.Identification of UH-60 Stability Derivative Models in Hover from Flight Test Data[J]. Journal of American Helicopter Society, 1995, 40(1):32-46.
[11] BENDAT J S,PIERSOL A G.Engineering Applications of Correlation and Spectral Analysis[M]. New York: John Wiley & Sons,1993.
[12] WINGROVE R C.Quasi-Linearization Technique for Estimating Aircraft States from Flight Data[J]. Journal of Aircraft, 1973,10(5): 303-307.
[13] MORELLI E A.Flight Test of Optimal Inputs and Comparison with Conventional Inputs[J]. Journal of Aircraft, 1999, 36(2):389-397.