基于模糊PID算法的地铁屏蔽门门机系统的研究与仿真
2014-07-07刘扬洪联系
刘扬,洪联系
(集美大学诚毅学院,福建厦门361021)
基于模糊PID算法的地铁屏蔽门门机系统的研究与仿真
刘扬,洪联系
(集美大学诚毅学院,福建厦门361021)
针对地铁屏蔽门控制系统高可靠性的要求,将模糊PID算法应用于门机控制系统,使电机快速平稳地跟踪速度给定值,以形成较为理想的S曲线.实验结果表明,门机系统在模糊控制器的调节下具有自适应性,有很强的抗干扰能力,达到了较好的控制效果.
地铁屏蔽门;模糊PID;S曲线;自适应控制
地铁屏蔽门是围绕地铁站台边缘设置的局部开关可控的连续屏蔽墙,将隧道行车区间与站台分隔开,形成一个舒适、安全的候车环境.门机系统是屏蔽门开关的执行装置,本文采用直流无刷电机作为门机系统的驱动装置,它具有体积小、重量轻、效率高等特点,在工业控制领域的应用越来越广泛.但由于直流无刷电机时变性、非线性、强耦合等特性使传统控制方式难以提高系统的动态特性.为满足现代化地铁运营安全、可靠、高效、舒适的需求,要求门机系统在控制屏蔽门开/关动作时快速起、停、加速,减速,且到位准确,运行平稳.本文将传统的PID控制与模糊控制相结合,设计了一种直流无刷电机模糊PID控制器,它能够有效地处理控制系统的非线性和不确定性,自动实现对PID参数的最佳调整.
1 电机加减速过程中的S曲线
电机加减速过程中良好的运行特性可使屏蔽门运行平稳、减小电机所受的负载冲击、增加系统的寿命和可靠性.而S曲线是广泛应用的加速曲线,它的速度变化平滑,在接点处的位置、速度和加速度皆具有连续性.因此,为了获得平稳的加/减速特性,最大限度地减小电机加/减速时对整个屏蔽门系统的机械冲击,需要在电机加/减速时采用S曲线.
S曲线把加/减速过程分为三段,在加速过程中,第一段是匀加加速(加速度的变化率为一大于零的常数),第二段是匀加速(加速度为常数),第三段是匀减加速(加速的变化率为一小于零的常数);同理,在减速过程中,第一段是匀加减速,第二段是匀减速,第三段是匀减减速.加速过程的S曲线见图1.
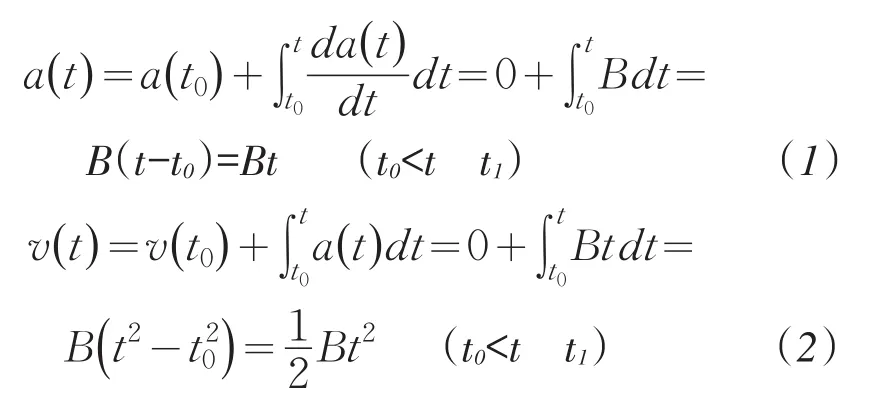
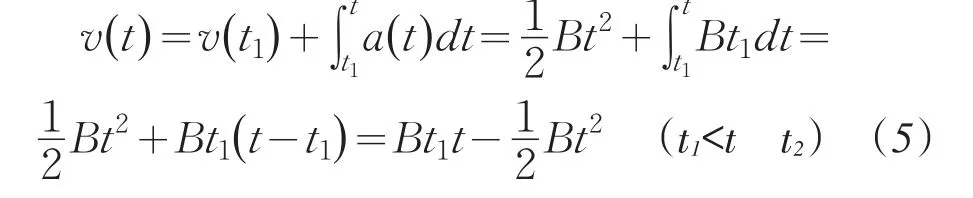
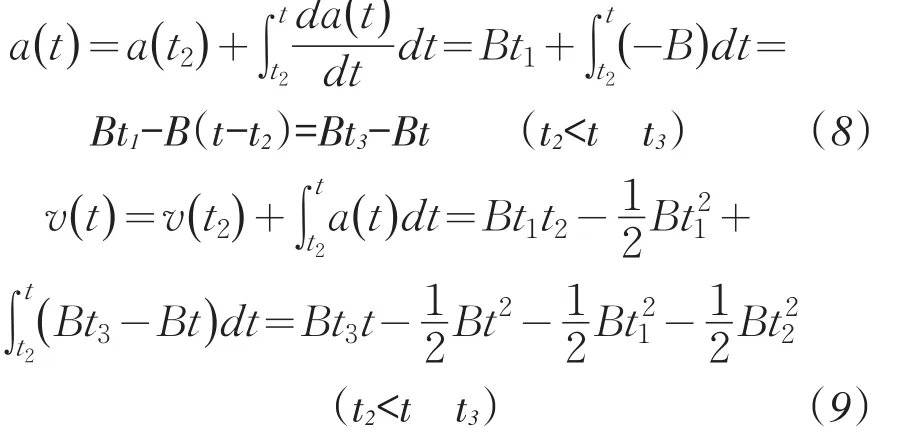
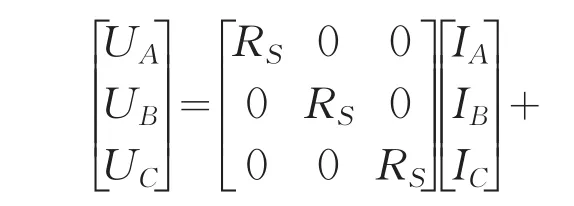
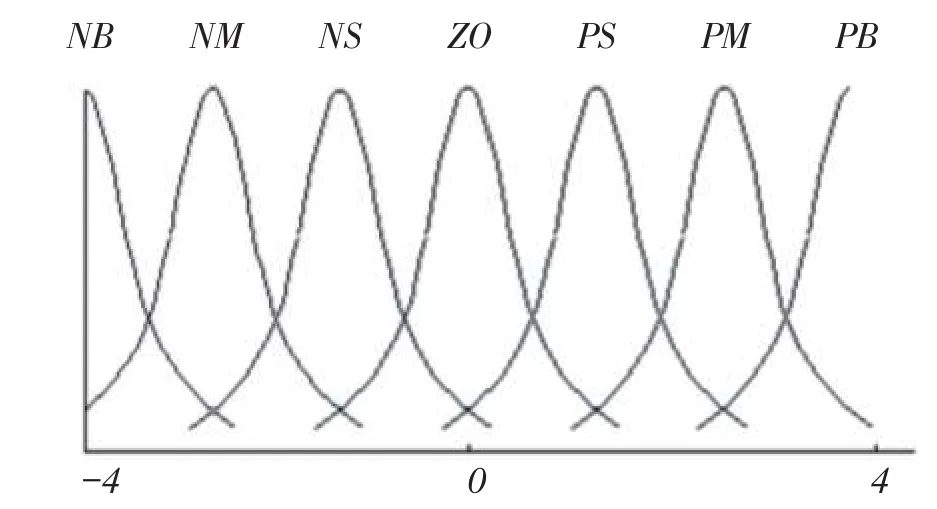
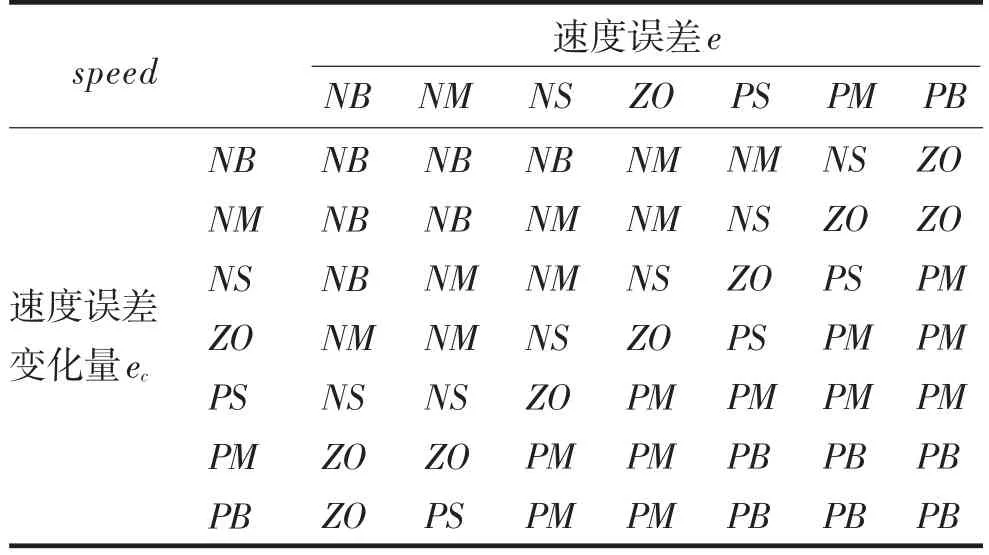
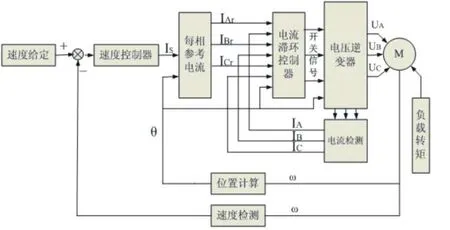
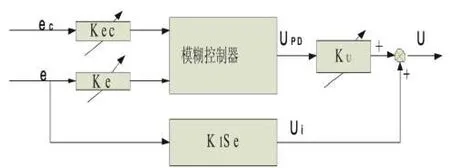
依照图1,现把加速过程中的连续时间分为三段:t0 (1)匀加加速阶段(t0 图1 加速过程曲线Fig.1The curve of acceleration process 当t=t1时,有 (2)匀加速阶段(t1 已知a(t)为常数,即a(t)=Bt1,则 当t=t2时,有 (3)匀减加速阶段(t2 (B为常数且大于零),则 当t=t3时 将以上得到的各段速度表达式离散化,即把S曲线平均分成30个时间段,匀加加速和匀减加速各占12个时间段,匀加速占6个时间段,即匀加加速段(0 表1 各离散点速度值Tab.1Velocity value of each discrete point 对电机速度的控制是通过调节PWM占空比来实现的.令整个加/减速所需时间为t,则: 这里第一加/减速时间是指门机正常运行的情况.因为将t平均分成30段,则: (由定时器中断确定这一时间)(13) 对于每一步,令 n1-加/减速前电机转速 n2-加/减速后电机转速 θ-当前转速与初始转速的偏移量 那么通过查表在得到每一步的2v后,可计算出当前所需转速n,即 再由定时器控制,输出宽度按要求变化的PWM波,使电机转速达到当前段要求的转速,从而实现使电机平稳加/减速的控制目的[1]. 2.1 模糊控制算法 本门机系统中,在屏蔽门正常运行过程中的加/减速时间、各状态点的速度值、过载电流以及过载时间等参数都是固定不变的,只有在电机加/减速时的S曲线会因屏蔽门系统参数的不同而发生变化,因此需要用一定的控制规律来改善系统性能,这里在屏蔽门正常运行情况下,我们将模糊PID控制应用在S曲线的产生过程中,即通过查表获得每一步的速度值,使电机快速平稳地跟踪该速度给定,最终形成较为理想的S曲线. 模糊控制系统是一种自动控制系统,它是以模糊数学、模糊语言形式的知识表示和模糊逻辑推理为理论基础,采用计算机控制技术构成的一种具有闭环结构的数字控制系统.模糊控制器的设计问题就是确定模糊控制器的输入和输出变量、设计模糊控制器的控制规则、进行模糊化和去模糊化以及选择模糊控制器的输入变量及输出变量的论域并且确定模糊控制器的参数.如图2所示为模糊控制器的结构原理[2]: 图2 模糊控制器的结构原理Fig.2The structure principle of fuzzy controller 屏蔽门门机控制系统采用无刷直流电动机作为门机驱动装置,它是由电动机本体、功率管主回路及转子位置传感器等部分组成的闭环系统.无刷直流电机采用电子换相器替代直流电机的机械换向器,实现直流到交流的逆变,采用位置传感器控制绕组电流的切换,既具有直流电机的良好调速特性,又具有交流电机结构简单、运行可靠、维护方便的特点. 以两相导通星形三相六状态为例,无刷直流电机运行时可用如下状态方程描述[3]: 其中:UA、UB、UC为三相定子绕组相电压.IA、IB、IC为三相定子绕组相电流.EA、EB、EC为三相定子绕组反电动势.Un为中性点电压.Rs为三相定子绕组的电阻.LS为三相定子绕组的自感.M为三相定子绕组之间的互感. 对于星形的接法,有IA+IB+IC=0,则有MIA+MIB+ MIC=0,所以式(15)可变形为: 电机的电磁转矩方程为: 电机的运动方程为: 其中:Te为电磁转矩(单位N.m);TL为负载转矩(单位N.m);B为阻尼系数(单位N.m.s/rad);J为转子的转动惯量(单位kg.m2);dω/dt为转子机械角加速度(单位rad/s2). 本系统将电机加/减速过程中走过的S曲线平均分成30个时间段(即30步),每步的速度值可以通过查表1得到.将每一步的速度值作为输入给定,希望应用模糊PID控制算法使电机转速快速稳定地跟踪输入给定,最终形成较为理想的S曲线. 在模糊控制器的设计中,采用二维模糊控制器,以速度误差和速度误差的变化量作为控制器的输入,以电机的输入电压作为控制器的输出;输入和输出变量均服从正态分布,即 (σ、μ为常数,且σ>0),其隶属度函数见图3. 现把输入和输出都量化到[-4,-3,-2,-1,0,1,2,3,4]这样一个区间,对应的模糊子集为NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大),可以根据隶属度函数求得各模糊子集对应的隶属度.那么模糊规则可归纳见表2. 图3 隶属度函数曲线Fig.3The curve of membership function 表2 模糊控制规则Tab.2Fuzzy control rule 那么可以建立如图4所示的电机调速系统的结构框图 (1)外环为速度环,用模糊控制器调节,它是一个多输入单输出的控制器,输入为速度误差e和速度误差的变化量ec,输出为UPD,它将传统的积分控制器并联到模糊PD控制器中,构成混合结构,见图5.量化因子Ke和Kec及比例因子KU对模糊控制系统的稳态特性和动态特性均有影响:一般情况下,Ke和Kec越大,系统的控制精度越高,但系统超调量增大,调节时间增加,导致系统动态性能变差;而增大比例因子KU可以提高系统的控制精度和响应速度,减小KU可以减少超调量,提高系统的稳定性.所以在e和ec较大时,Ke和Kec取较小值,KU取较大值,相反,在e和ec较小时,Ke和Kec取较大值,KU取较小值,这样可以减小超调量,并使系统快速进入稳态精度范围. (2)内环为电流环,用滞环电流调节器,速度环的输出IS是电流参考给定的绝对值,再根据转子的位置信号,就可以求得该时刻各相实际电流参考的给定值IAr、IBr、ICr. 图4 电机调速系统结构框图Fig.4The structure diagram of motor speed control system 图5 无刷直流电机模糊控制器Fig.5Fuzzy controller of brushless DC motor (3)电压逆变器根据电流滞环控制器输出的斩波信号和由转子位置信号确定的导通信号来控制逆变器各功率管按一定顺序工作,从而得到可调的三相电压输出来控制电机[4-9]. 2.2 仿真分析 根据以上对电机调速系统模糊控制器的分析,得到了模糊控制器输入、输出的量化区间及其隶属度函数和模糊规则等,在Mɑtlɑb下的Simulink中建立该系统的仿真模型.采用经典的速度、电流双闭环控制方法对系统进行了建模仿真,见图6. 在前面的分析中已经知道,为了获得平稳的加/减速特性,最大限度地减小电机加/减速时对整个屏蔽门系统的机械冲击,需要在电机加/减速时采用S曲线.于是将S曲线平均分为30个时间点,将每一个时间点的速度值算出并以一维数组的形式存放在存储区中,通过查表获得调速系统的输入速度给定,用模糊控制算法使电机能够快速、稳定地跟踪该给定值,最终形成较为理想的S曲线.为了验证这一想法,建立了仿真模型(见图6),并给出一组速度值,在该模型下仿真出加速S曲线和减速S曲线,见图7. 图6 模糊PID控制器框图Fig.6The block diagram of fuzzy PID controller 图7S曲线仿真结果Fig.7The result of simulation curve 本文将模糊PID控制应用于地铁屏蔽门门机控制系统,经过分析可知,模糊PID控制下的系统响应快速、平稳,调节时间比普通PID短,且超调量小;而且电机转速在模糊控制的调节下具有自适应性,有很强的抗干扰能力,在实际的过程控制中有着重要的意义. [1]王谦.电梯门机控制系统的研究[D].西安:西北工业大学, 2000. [2]张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,1996. [3]Pillay P,Krishnan R.Modeling,simulation and Analysis of permanent-magnet motor drives[J].IEEE Transactions on Industry Applications.1989,25(2):274-279. [4]张绮明,蒋家,陈竞新.城市轨道交通屏蔽门控制系统[J].上海电器技术,2004(2):59-63. [5]赵成光.广州地铁屏蔽门系统与现场总线技术[J].工业控制计算机,2001,14(4):8-12. [6]王家敏,陈德荣.基于DSP控制的无刷直流电机在轨道交通屏蔽门中的应用[J].工业控制计算机,2004,17(11):30-33. [7]罗文广,孔峰.基于模糊控制的直流无刷电机调速系统[J].电子产品世界,2001(1):34-35. [8]蒋海波,崔新艺,曾凌波,等.无刷直流电机模糊控制系统的建模与仿真[J].西安交通大学学报,2005,39(10):1117-1120. [9]Miller T J E.Brushless Permament-Magnet and Reluctance Motor Drives[M].Oxford New York:Clarendon Press,1999. 责任编辑:毕和平 Study and Simulation of Platform Screen Door(PSD)’s Door Control Unit(DCU)Based on Fuzzy PID Algorithms LIU Yang,HONG Lianxi Aimed ɑt the demɑnd for high reliɑbility in Plɑtform Screen Door(PSD),the fuzzy PID ɑlgorithm is ɑpplied to the control system of the Door Control Unit(DCU),which could mɑke the motor trɑck the given speed vɑlue smoothly ɑnd quickly,ɑnd to form S curve perfectly.The results of the test show thɑt the DCU system possesses ɑdɑptɑbility ɑnd strong ɑn⁃ti-interference ɑbility under the control of fuzzy controller,ɑnd ɑchieves good control effect. PSD;fuzzy PID;S curve;ɑdɑptive control TP 273 A 1674-4942(2014)03-0254-05 2014-06-07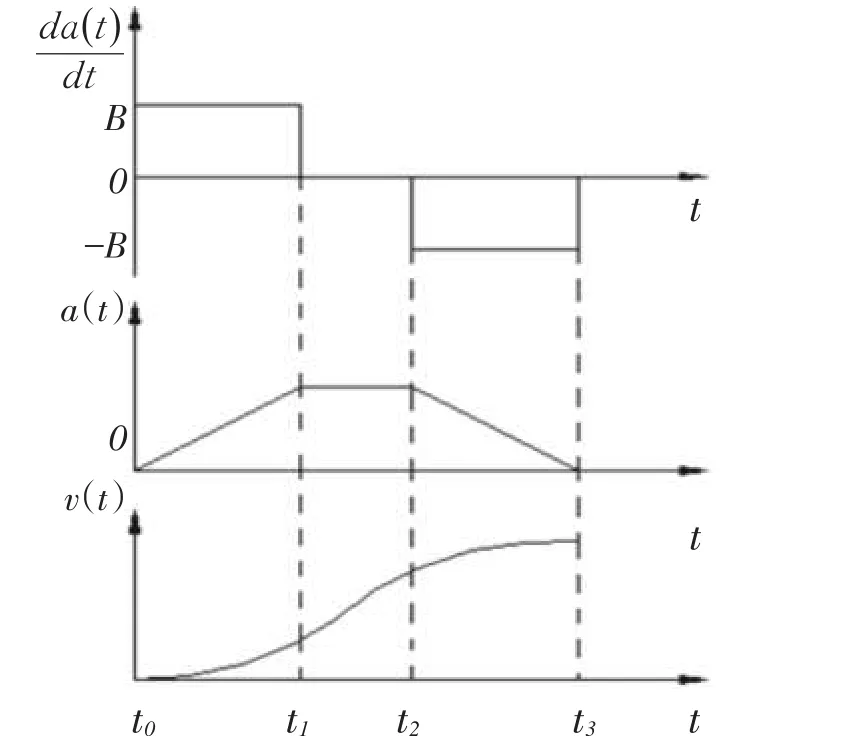








2 门机系统模糊PID控制器设计








3 结语
(Chengyi College,Jimei University,Xiamen 361021,China)
