基于混合驱动的无刷直流电机特性研究
2014-07-07侯红胜刘卫国
侯红胜,刘卫国
(西北工业大学自动化学院,陕西西安710072)
基于混合驱动的无刷直流电机特性研究
侯红胜,刘卫国
(西北工业大学自动化学院,陕西西安710072)
通过分析无刷直流电机两相导通与三相导通驱动控制的特点,改变功率器件导通角度能够实现混合驱动。随着导通角度的增加,电机的输出最大转速和功率增加,稳速时的负载范围扩大,同时转矩脉动下降。利用转子位置传感器能够实现任意角度的混合驱动。采用混合驱动技术能够提高电机的输出能力,更加充分利用电机,为电机的选择和设计提供参考。
无刷直流电机;混合驱动;机械特性;转矩脉动;导通角度
1 引言
无刷直流电机通常采用全桥驱动电路,功率器件根据转子位置信息逻辑信号实现电机三相绕组导通和关断。常见的导通方式为两相导通方式和三相导通方式[1]。两相导通方式通常采用方波电流驱动方式,三相导通方式通常采用正弦波电流驱动方式[1-2]。
在方波无刷直流电机驱动中,通常采用两相导通方式,但是没有完全利用电机。论文分析功率器件导通角度介于120°与180°(电角度)之间的混合驱动方式下电流的变化,并求取电机电磁转矩及其平均值,从而得到电机的机械特性和转矩脉动。从分析和仿真可知,采用混合驱动的方式可以提高电机的输出转速、转矩和功率,降低转矩脉动。
2 无刷直流电机的驱动
无刷直流电机及驱动电路等效图如图1所示,电机绕组通常采用星形连接方式。图1中RaRb,Rc,La,Lb,Lc分别为定子各相绕组电阻和电感N为电机中性点,Udc为直流母线电压,ea,eb,ec分别对应三相反电势。假设三相电路对称,则Ra=Rb=Rc=R,La=Lb=Lc=L。

图1 无刷直流电机及驱动电路原理图Fig.1 Schematic diagram of BLDCM
理想两相导通驱动方式梯形波反电势与方波电流关系如图2所示。图2中在任何时刻只有两相绕组同时导通。每个功率管的导通角度为120°(电角度)。当导通角度超过120°时,会出现三相绕组同时导通的现象。如图3所示,此时两相绕组与三相绕组交替导通,即混合驱动方式。
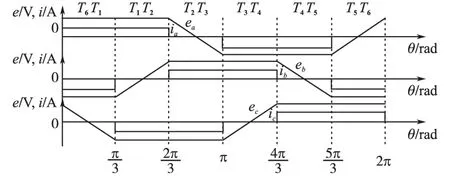
图2 两相驱动理想反电势、电流波形Fig.2 Ideal EMF and current waveforms with two phases conducted
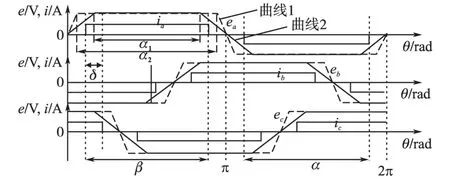
图3 混合驱动反电势、电流波形Fig.3 Ideal EMF and current waveforms with three phases conducted
图3中α1,α2表示梯形波反电势平顶宽度,β表示功率器件导通角度,120°<β<180°。δ表示此时有三相绕组导通。曲线1表示α2>β,反电势梯形波波顶宽度大于功率管导通角度,曲线2表示α1<β。
两相绕组导通时电机等效电路图如图4a所示,假设B,C相导通。
不考虑过渡过程,则电机的电枢电压方程为

式中:E2,I2分别为两相导通时相反电势和平均电流值。
此时电机电磁转矩Tem2为

三相绕组驱动时电机等效电路图如图4b所示。
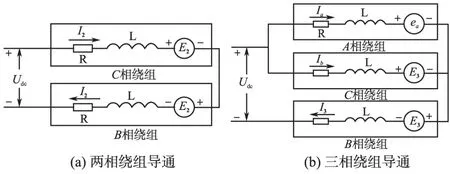
图4 等效电路Fig.4 Equivalent circuit
A相绕组提前导通,为了分析方便,假设此时A相绕组反电势达到恒定值,即反电势平顶宽度大于或等于功率管导通角度。不考虑过渡过程,电机的电压方程为

式中:E3,I3分别为三相导通时相反电势值和电流平均值。
此时电磁转矩Tem3为

对比式(1)与式(3)可知,当E2=E3时,I3>I2,从而Tem3>Tem2,即在同样转速下,三相绕组驱动电磁转矩大于两相绕组驱动时电磁转矩。当I2=I3时,Tem3=Tem2,E3>E2,即在同样的电磁转矩下,三相绕组驱动时电机输出转速大于两相绕组驱动时电机转速。采用图3所示两相绕组与三相绕组交替驱动的情况,考虑电机由于机械惯性的原因,保持转速恒定,即E3=E2,此时电磁转矩Tem23处于交变过程,其一个周期内的平均值为Tem2<Tem23<Tem3。
以上分析是基于反电势为曲线1,不考虑过渡过程的结果。随着导通角度的增加,三相导通时会出现反电势不能保持恒定值,同时由于电机绕组电感存在,以及两相绕组与三相绕组交替导通,在混合驱动时电流不能保持理想方波形状。但是上述的分析结果不变。
3 电流变化分析
图3中,为了简化分析,以曲线1示意分析绕组电流的变化规律。在一个周期内,绕组的导通顺序为:C—AC—A—A—A—AB—B—B—B—BC—C—C共12个状态,其中两相导通与三相导通各6个,且交替导通。由于对称关系,绕组正相导通与反向导通电流波形反向。所以只需要分析两相导通,三相导通,以及三相导通到两相导通由于电感作用使得关断相通过二极管续流时电流波形。对应图3,分析C导通,AC导通,以及AC到A过渡过程的电流变化情况即可。为了分析方便,忽略电枢绕组电阻压降,不考虑PWM影响,即PWM=1状态,电机由于惯性保持转速恒定,导通相绕组反电势恒定,等于E或-E,且2E=Ken,Ke为反电势系数。

忽略电枢电阻压降,B,C电流的变化为

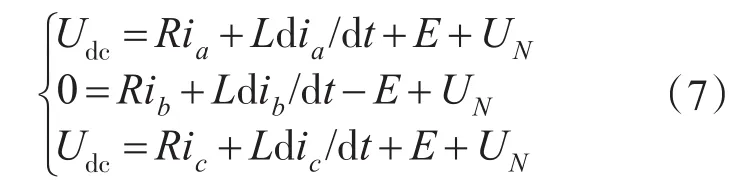
此时中性点电压为

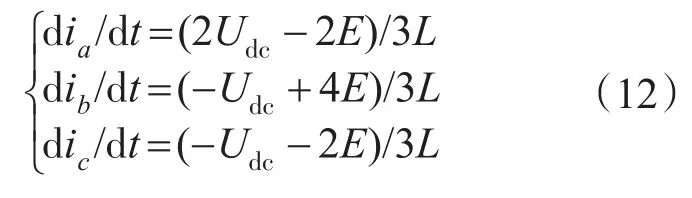
忽略电枢电阻压降,此时三相电流的变化率为

3)C相关断,由于电感原因,电流不能立即降为零,此时端电压方程为

此时中性点电压为

忽略电枢电阻压降,此时三相电流的变化率为
在A相绕组正半周导通周期内,A,B,C三相绕组电流的变化规律如表1所示。
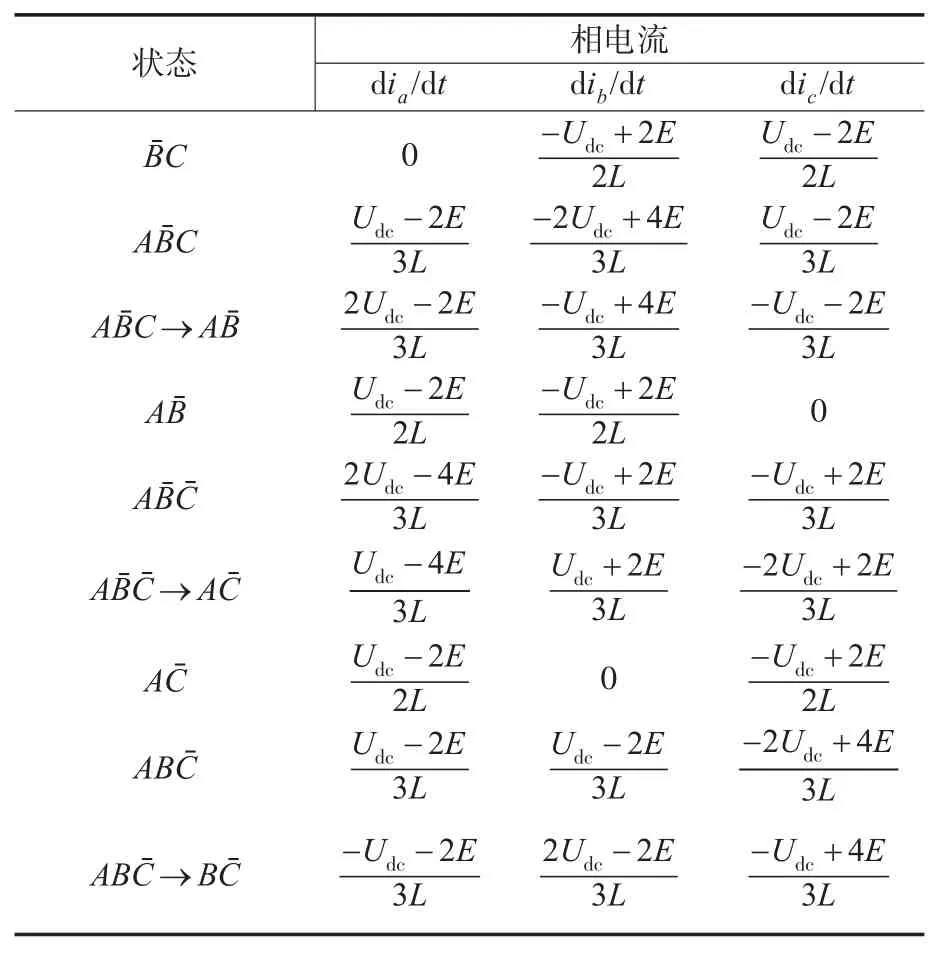
表1 三相绕组电流变化规律Tab.1 Variation of winding current in three-phase
当反电势波形平顶宽度小于功率器件导通角度时,在功率管开通后和功率管关断前的一段时间,反电势不再保持恒定,造成电流的变化非线性。
4 机械特性分析
假设每个功率管的导通角度为β,则两相导通与三相导通的角度分别为(180-β)°和(β-120)°。其中三相变两相导通过程中根据关断相是否有续流电流分成两部分,如图5所示。

图5 三相电流波形图Fig.5 Three phases current waveforms
图5中A,B,C分别表示三相电流。χ代表续流对应的角度,①~⑨表示A相绕组正半周电流变化的9个阶段,I1~I7为各个阶段顶点电流值。假设一个周期(360°电角度)所需要的时间为T,T与转速及电机极对数之间的关系为

式中:n为电机的转速;p为电机的极对数。
则每段电流变化的时间可以转化为[(β-120)/360]T,[(180-β)/360]T和(χ/360)T。根据式(6)、式(9)、式(12)及图5分析A相电流在各个阶段的变化值。
阶段①电流从0上升至I1,

阶段②电流从I1上升至I2,

阶段③电流从I2上升至I3,

阶段④电流从I3上升至I4,

阶段⑤电流从I4下降至I5,

阶段⑥电流从I5上升至I6,

阶段⑦电流从I6上升至I7,

阶段⑧从I7下降至零。
阶段⑨电流一直保持为零。
从上述可知由电机转速n和功率器件导通角度β可以计算电流在各个阶段的值。根据对称原则,可求得B,C相各阶段电流值。并由第⑧阶段电流从I7下降至零可以求取χ值。结合式(13)~式(20)可以求得:

从而有:

电机的电磁转矩表示为

式中:Tem,ω分别为电机的电磁转矩和机械角速度。
如第2节中分析当三相绕组导通时反电势保持恒定,转矩公式可以改写为

三相绕组电流一直变化,电磁转矩始终处于波动过程,利用平均电磁转矩求解电机的机械特性[3]。从图5中可以看出I5=I2,I6=I3,I7=I4-I1,由电流和转矩周期关系,分析60°(电角度)内电流即可,根据I1,I2,I3,I4可求取电机的平均电磁转矩。由式(15)~式(17)、式(23)结合式(13)可以求得I1,I2,I3,I4电流值为

图6对应图5前3阶段,即60°内电流的变化波形。
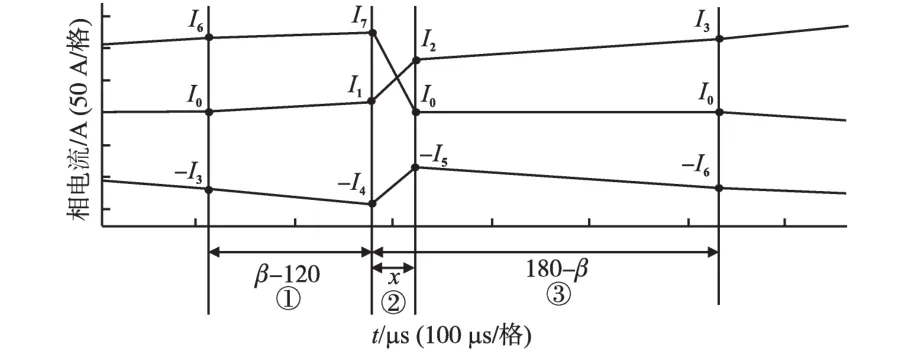
图6 前3个阶段电流波形图Fig.6 The three segments current waveforms
从图6和式(14)~式(17)中可知:I0=0,I4>I3>I2>I1>0。一个周期内各相绕组电流的绝对值变化如图7所示。
三相电流绝对值的和在六分之一个周期内循环,变化规律如图7所示。由式(24)可知电流绝对值和的平均值为
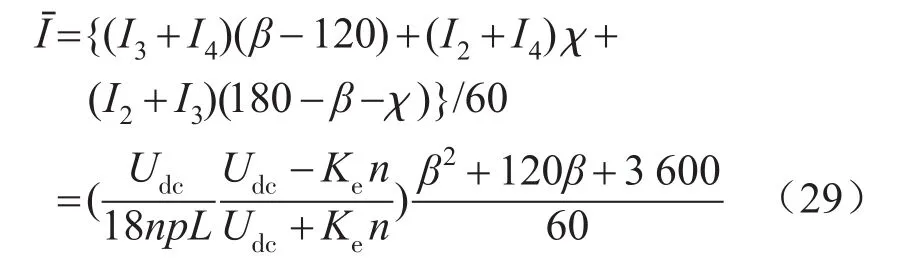
从而得到电磁转矩的平均值Tem为

式中:KT为电机的转矩系数。

图7 三相电流绝对值变化Fig.7 Three phases current absolute value
在电机参数确定后,通过设定转速值,由式(29)、式(30)可以求得平均电磁转矩和机械特性。改变β能得到电机在不同导通角度下机械特性。由式(29)可知随着功率器件导通角度的增加,平均电流值增加,电磁转矩的平均值增加。
5 转矩脉动
无刷直流电机转矩脉动的抑制和消除一直是研究的热点[4-6]。从图7可知,无刷直流电机混合驱动中,电磁转矩最大值出现在第①阶段结束时刻,最小值出现在第②阶段结束时刻。由此,转矩脉动率为

根据式(26)、式(28)、式(29)有:

从式中可知,当功率器件导通角度保持不变时,随着转速的增加,转矩脉动率增加。当转速不变时,功率导通角度β增加,转矩脉动率ξ会下降。
6 转子位置获取
在混合驱动中,功率管导通的开通与转子位置有一定对应关系,为了实现功率器件导通角度控制,需要知道转子的位置信息。可以通过无位置传感器控制技术或者已有位置传感器实现正确位置点的采集[7-8]。通常的三相无刷直流电机中采用3个霍耳位置传感器实现电机的120°驱动方法。通过正确的霍耳位置信号和电机的转速等可以获取转子的实时位置信息。从而实现功率管导通角度的任意导通角度控制。
通过3个霍耳位置传感器可以把1个周期(360°电角度)分成6个区间。在获取一个准确的位置信息后,到下一个位置信息之间,经过的角度为

式中:θ为从一个准确位置移动到下一个位置之间移动的角度;t为运行的时间。
当需要实现功率器件的导通角度值,可以计算t,并在定时器中设置此值,经过t可以控制功率管的导通与关断以实现功率管的任意导通角度控制。
7 实验分析与结论
无刷直流电机的额定参数为:PN=9kW,Udc=90V,IN=115A,nN=9 460r/min,R=0.004Ω,L=0.02mH,TN=9.3N·m。图8是电机在不同导通角度下的机械特性。从图8中可以看出,随着导通角度的增加,输出转速有所提高。额定转矩时转速由9 460r/min提高到9 644r/min,提高了2.4%。随着导通角度的增加,功率管关断时间减小,而负载的增加会使得绕组续流时间增加。所以随着导通角度的增加,最大负载范围会缩小。图8中160°导通角驱动时负载只能达到24N·m。负载继续增加会造成关断相不能正常关断。
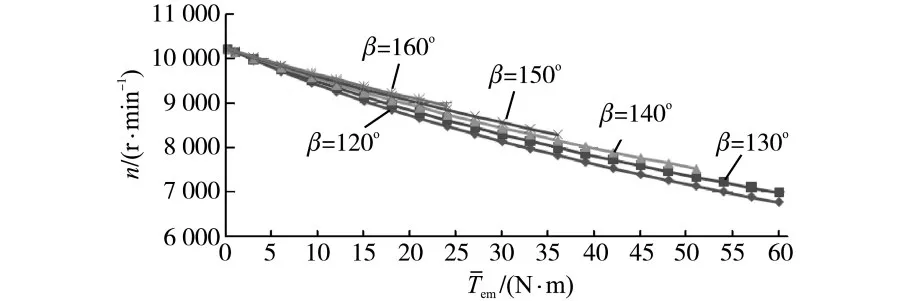
图8 不同导通角度下电机的机械特性Fig.8 Speed-torque characteristics with conduct angle
图9是不同导通角度下转矩脉动与电磁转矩的特性曲线。随着负载的增加,转矩脉动下降。且随着导通角度的增加而减小。在额定负载时,转矩脉动由58%下降到48%。
图10是稳速驱动中,电磁转矩与驱动角度在额定转速时曲线图。在额定负载内,采用两相驱动方式,施加PWM调制可以使转速稳定,超过额定负载后,随着负载的增加,需要增加功率器件导通角度以实现电机的输出转速稳定。额定转速时采用160°导通时最大转矩达到13.6N·m,提高了38%。
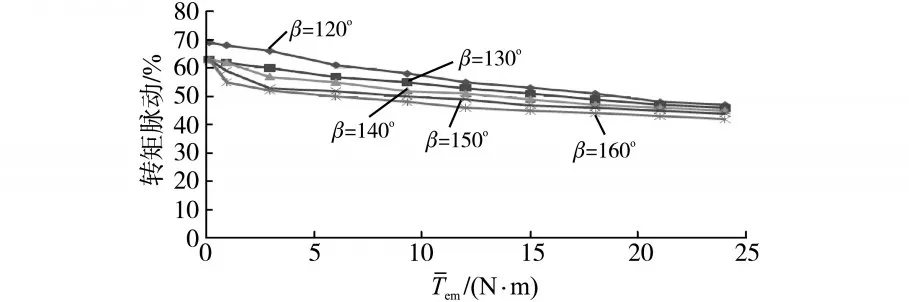
图9 不同导通角度下转矩脉动Fig.9 Torque ripple with conduct angle

图10 导通角度与平均电磁转矩关系图Fig.10 Conduct angle to average torque
通过两相导通与三相导通相结合的混合驱动方法,可以提高无刷直流电机额定转矩下的输出转速和额定转速下的电磁转矩。同时能够降低转矩脉动,适用于短时要求输出大负载情况在电机的设计时可以选择合适的电机参数,优化电机特性。
[1]夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):25-34.
[2]谭亚丽,郭志大.无刷直流电机方波正弦波复合驱动器设计[J].电气传动,2011,41(6):11-13.
[3]王晋,陶桂林,周理兵,等.基于换相过程分析的无刷直流电动机机械特性的研究[J].中国电机工程学报,2005,25(14):141-145.
[4]郝晓宇,窦满峰,张浩.变角度导通法补偿换相转矩脉动[J].微特电机,2011,39(8):14-17.
[5]Shi Tingna,Guo Yuntao,Song Peng.A New Approach of Minimizing Commutation Torque Ripple for Brushless DC Motor Based on DC-DC Converter[J].IEEE Transaction on Industrial Electronics,2010,57(10):3483-3490.
[6]陈基锋,张晓峰,王斯然.基于能量单元法的无刷直流电机导通区转矩脉动[J].电工技术学报,2010,25(11):36-41.
[7]Wu Yuanyuan,Deng Zhiyuan,Wang Xiaolin.Position Sensorless Control Based on Coordinate Transformation for Brushless DC Motor Drives[J].IEEE Transactions on Power Electronics,2010,25(9):2365-2371.
[8]马瑞卿,李颖,刘冠志.基于dsPIC30F2010的无刷直流电动机正弦波驱动系统设计[J].微特电机,2010,38(8):11-14.
Study of Brushless Direct Current Motor Performance Based on Mixed Drive
HOU Hong-sheng,LIU Wei-guo
(College of Automation,Northwestern Polytechnical University,Xi’an 710072,Shaanxi,China)
By analyzing the two phases drive and three phases drive in BLDCM,changing the power devices conduct angle can realize the mixed drive.With the conduct angle increased,the maximum speed and output power were increased,the load with rated speed was enlarged.Using the position sensors in the motor,any value of conduct angle can be realized.The mixed drive method can improve the output power.It can make the best use of motor.Also it can be a reference to choose or design a BLDCM.
brushless DC motor;mixed drive;speed-torque characteristics;torque ripple;conduct angle
TM351
A
2013-11-29
修改稿日期:2014-06-28
侯红胜(1978-),男,博士研究生,讲师,Email:houhs@nwpu.edu.cn
