SAR 图像匹配制导精度影响因素分析
2014-07-07张东兴贾兴亮李相平祝明波殷勇
张东兴,贾兴亮,李相平,祝明波,殷勇
(1.海军航空工程学院电子信息工程系,山东烟台264001;2.海军装备部西安局,兰州730070;3.91436部队,广西柳州545613)
SAR 图像匹配制导精度影响因素分析
张东兴1,贾兴亮2,李相平1,祝明波1,殷勇3
(1.海军航空工程学院电子信息工程系,山东烟台264001;2.海军装备部西安局,兰州730070;3.91436部队,广西柳州545613)
合成孔径雷达(SAR)具有高分辨率、全天候等优点,是提高精确制导武器制导精度的有力工具。制导精度是精确制导武器的重要性能指标,影响SAR制导系统精度的主要因素有实时图的获取误差及预处理误差、图像匹配误差、惯导测量误差、SAR制导特殊弹道引起的导航制导的误差。概述了SAR图像匹配制导系统精度的相关研究,对比和分析了这些研究和结论,指出了该研究存在的问题和发展方向。
SAR图像;图像匹配;制导精度
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种高分辨率成像雷达,既具有高的角分辨率(方位向分辨率)又有足够高的距离向分辨率。高的角分辨率是它相对于传统雷达的优点,且得到的高分辨率雷达图像已接近光学成像的分辨率,成像基本不受能见度等气象条件的影响,具有全天候的特点,这是SAR成像相对于可见光成像和毫米波雷达成像的优点。因具有高分辨率、全天候以及对一些地物有穿透性[1]等优点,作为一种新型的成像工具,合成孔径雷达在精确制导领域正发挥着越来越大的作用。
本文主要从影响因素方面来综述SAR制导系统精度方面的研究。SAR图像匹配是把不同成像条件下对同一场景录取的2幅或多幅SAR图像在空间上进行对准,以确定图像之间的平移、旋转和缩放等关系的过程[2-5]。
1 SAR制导系统原理
SAR制导系统原理图如图1所示。图像匹配制导技术是利用飞行器上传感器获取的实时图像与飞行器上存储的参考图像进行匹配以获得飞行器的当前位置,用以修正惯性导航的累积误差,从而实现飞行器自主高精度导航的一种技术。
一般而言,SAR图像匹配制导可以获得很高的制导精度,但其系统较为复杂,如图1所示。影响其精度的可能因素较多,概括地讲,影响图像匹配制导精度的主要因素有以下几方面:
1)实时图的获取及预处理误差;
2)图像匹配误差;
3)惯导测量误差;
4)SAR特殊弹道引起的制导误差。
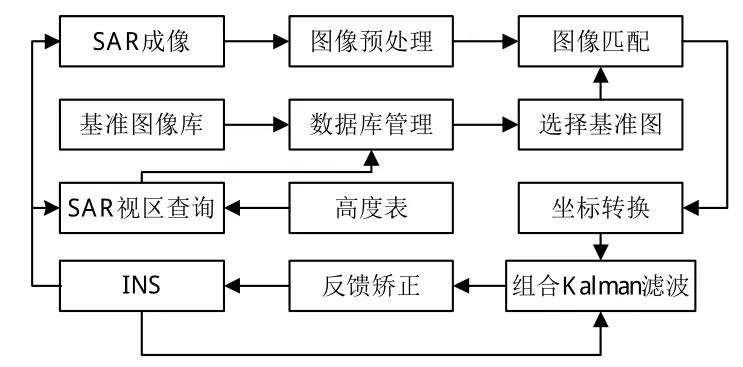
图1 SAR成像匹配制导系统原理图Fig.1 Block diagram of SAR image matching guidance system
2 实时图的获取及预处理
一般而言,在SAR成像获取过程中,由于弹载环境、弹载平台非匀速直线运动以及干扰的影响,会引入噪声和畸变。另外,对实时图进行预处理时应考虑实时图的可匹配性、噪声和畸变等情况,而滤波和特征提取,这种预处理一般会提高实时图的可匹配性,但同时也会引入误差,减少图像的有效信息量。
文献[6]指出由于实时成像手段以及环境条件的限制,实时图存在一定的灰度畸变、几何畸变及噪声干扰。因此,在匹配前须对这些畸变进行校正处理。如果成像分辨率和基准图分辨率不同,在预处理时可能还应考虑将二者分辨率调整到一致。如果匹配算法不是直接利用实时图和基准图的灰度,而是利用图像的某些特征,则需对实时图和基准图进行特征提取。所有这些处理必然引入一定的处理误差,从而减小了实时图与基准图的信息量。为了提高匹配的可靠性与成功率,实时图的预处理一般还包括失真分析,即选择失真小、可匹配性高的实拍图像与基准图进行匹配。实时图的预处理过程中,与基准图相同的处理模块最好选择相同的处理算法,这样可以增加实时图与基准图在数据上的共性。
环境对于末段图像匹配的影响是很大的,如景物的回波反射特性的变化、雷达波束投射角等的变化所引起的阴影和景物的遮挡效应,以及在基准区域中实际景物的变化等[7]。所有这些因素都将引起图像匹配中实时图全部或部分象素的灰度值变化,从而影响匹配结果[8]。人为的干扰会对图像匹配的效果产生更大的影响[9]。参考图和实时图可能来自不同的传感器,不同的成像机理,将会导致实时图像与参考图像产生较大差异。
图像在匹配之前要进行预处理,预处理包括2种方法:灰度值的标准化和图像分割。灰度值的标准化指的是将图像的灰度零均值化和方差标准化。方差标准化可以减小灰度值增益变化的影响,灰度零均值化可以减小灰度偏置的影响。图像分割是用于减小图像的畸变对系统性能的影响。另外,若采用基于特征的匹配算法,在预处理中还需对图像提取特征、去噪声和畸变等[10]。
对于实时图获取过程中可能引入畸变的问题,华中理工大学图像识别与人工智能研究所张俊,在“图像匹配与雷达地图匹配制导中匹配技术研究”一文中,指出图像畸变可分为5类:①传感器噪声:成像系统存在电路噪声、量化误差、非均匀特性等噪声源。②传感器视角变化:传感器的视角和姿态的变化导致的几何畸变。③不同传感器成像:SAR成像和光学成像,不同类型的传感器的所成图像差异较大。④成像的自然条件:气象等条件变化引起的目标反射特性的变化。⑤目标景物的变化:不同时间获取的图像,其对应的景物可能会有自然或人为的变化[11]。文献[12]指出实时图获取时传感器、气象条件的变化和地物反射率的变化引起会畸变,并更详细地描述了气象条件的变化对图像的灰度、分辨率和对比度的具体影响。
文献[13]指出SAR图像与光学图像匹配本质上是一个低信噪比的图像匹配问题,为了提高匹配性能必须设法提高图像的信噪比;并分析了地面制备特征参考图的重要性,研究了基于知识的特征参考图制备方法,提出了3种具有智能特点的雷达与光学图像匹配新算法,并用计算机模拟实验结果证实了研究结果的正确性和应用价值。
由上述内容可以看出实时图的获取和预处理过程必然会引入误差。对于成像的自然条件、目标景物的变化和其他随机性干扰(包括人为的和不可预测的干扰),一般主要通过航迹规划和执行任务的时机的把握来减少自然条件和目标景物的变化对实时图的获取的影响,但这些随机的因素的影响不可能完全被消除。
3 图像匹配误差
匹配算法是影响图像匹配误差的关键因素,根据算法着重点的不同,匹配算法可分为:①改善匹配性能的预处理算法,这类算法一方面是去畸变和噪声,另一方面是可以改善匹配性能;②提高匹配速度的算法;③提高匹配精度的算法;④稳健性算法。当然这方面的算法并不是孤立的,最好的算法应该集这几种优点于一身,但现实的图像匹配受多种因素影响,很难以实现算法的最佳。
基于灰度的匹配算法的优点是抗噪声能力强,在灰度和畸变不大的情况下,正确匹配概率和精度较高。缺点是匹配速度慢,抗几何畸变能力弱。
基于特征的匹配算法抗几何失真及灰度畸变能力强。SIFT[14]、SURF[15]等高性能匹配算法可以对图像缩放、旋转、平移等具有不变性,为差异较大的SAR图像匹配提供了有力支持。
匹配算法可以分为2个阶段:截获阶段和精确定位阶段。在截获阶段应该尽可能的避免错误的定位并找到一个包含正确匹配点的“截获区”,在精确定位阶段,采用匹配精度高的算法,得到尽可能高的精度,这2个阶段所采用的预处理和匹配算法可能不同。匹配精度可以通过相关面中相关峰的陡度和“图像分辨率”来估计,精度依赖于象素间相关和图像中的均匀区域的数量,在图像存在较大畸变且图像的结构比较单一的情况下,匹配精度会大幅度地降低。在出现几何畸变时可以通过去畸变算法和缩小图像尺寸的方法来提高精度。一般的情况下,可以采用分割图像的技术结合特征类匹配算法来提高精度。文献[16]把算法分为一般的相关(基于灰度值的)、纯特征相关、特征匹配相关和混合型算法,并把各种算法的特点予以较为详细的分析。
匹配算法的关键指标是匹配速度和可靠性。为提高运算速度可以采用分层匹配算法,先在降低分辨率的基础上粗略地搜索可能的匹配点,为下一步的匹配减少了运算量;再进一步提高分辨率,进行匹配。由于粗略匹配已经排除了大部分非匹配点,精度匹配只需要在几个可能匹配的位置进行匹配,从而节省了运算量,提高了匹配速度。
文献[17]指出快速实时图像匹配在巡航导弹精确攻击目标中起着极重要的作用。文中研究了在保证精度的条件下提高图像匹配速度的问题。该文用Hausdorff距离代替传统的欧氏距离的相似度指标,利用二进制编码和十进制编码的遗传算法和分别基于频域和空域的分层算法替代全空间逐点搜索。实验表明,该算法在保证一定精度的条件下提高了图像匹配的速度。文章还指出根据不同的快速算法,可区分基准图图像匹配品质的差异,为巡航导弹的航迹规划提供参考,这无疑是一种新的思路。
为去除基准图和实时图间的几何畸变,可以采用一种叫“地址修正”的迭代算法[18],其基本思想是2图间的几何畸变可以用共面图像的8参量变换来描述,该迭代算法收敛于这些几何参数,因而可以用于移除2图间的几何畸变。
针对几何畸变问题,文献[19]介绍了一种新的匹配思路,叫做“空间窗”(spatial windowing),其基本思想是用多个具有共同的中心、但大小不同的图和基准图进行匹配。单个图的匹配,由于畸变的存在导致在非匹配点出伪相关峰,但这些伪峰在别的尺寸的图产生的相关面中可能就不存在了。由于各图是同心的,那么每个图的相关面中在正确匹配点都会有相关峰。把各图的相关面的值相乘,那么正确匹配点就会有一个很高的峰值,而由畸变引起的相关峰则会被其他图的相关值抵消。这个相关方法既可以去几何畸变,又可以提高匹配精度。文献[20]给出了另一种方法,叫做“子区相关”(sub-area correlation),其基本思想是从基准图中选取一些小图(子图),使这些小图中的几个在实时图中出现的概率很大。这些子图在基准图中的精确的相对位置关系是已知的,匹配时即使有几何畸变的影响,只要这些子图的位置能较准确的定位出来,就能找到正确匹配点。
另外,空间重复模式对图像匹配影响很大,因为在别的位置的图案模式几乎和匹配点处的图案模式相同,因而在重复模式处在相关面中会出现很高的相关峰。文献[21]提出了混合型匹配算法可以估计参考图的冗余程度和重复模式的位置,并用仿真结果证实了该算法的有效性。该算法在匹配地图的选择过程中十分有用。
实际的图像匹配中,地面景物的回波反射特性、地表含水量的变化、天气和云层等都会对匹配造成影响,因而要求算法有较强的适应性。在实际的应用中算法的稳定性又称之为算法的适应性[22-23]。
文献[24]针对图像匹配制导的需求,研究了去均值归一化、基于直方图拉伸和基于局部平滑相关匹配算法,分析了算法的适应性,比较了每种算法的优缺点,并结合巡航导弹的使用,讨论了影响匹配结果的一些基本的、可能的环境因素。
总之,图像匹配算法经过几十年的发展已经取得了很大的进展,但是由于成像环境复杂多变,现有算法在某些方面都有不尽人意的缺陷,尚且没有一种算法能解决所有的图像匹配问题[25-26]。在以下几个方面值得更深入的研究:
1)建立新的理论框架,提高算法的稳健性和运算速度。目前国内外对于图像的匹配的方法大多是针对某一种特定的应用而独立研究的,这使得各种匹配方法较多但却不成体系,且算法的稳健性不够强。
2)复合匹配算法。尽可能结合与挖掘现有方法中的优点,开发研究新的匹配算法。
3)基于局部特征的匹配算法。目前,大多数算法是利用图像的全局特征,但是物体的全局特征一般不容易获取,而且当物体之间存在遮挡时提取的全局特征是不可靠的,局部特征能较好地解决这一问题。
4)基于模型的匹配算法的进一步研究。基于模型的方法为边缘检测、图像分割以及图像匹配等问题的研究提供一个新的思路,现有结果也展现出了该方法的优越性,但是对它的研究还不够深入,比如,变形模型对于噪声比较敏感、初始轮廓及模板的选取困难、优化过程易陷入局部最小以及计算量大等,都是需要进一步研究和克服的问。
4 惯导测量误差
文献[27]给出了在SAR系统正侧视(即波束指向与雷达运动方向严格垂直)飞行情况下,在导弹末制导中利用距离向上3点的位置(即3个固定的目标)以及斜距和地距的几个已知参数,从导弹规则飞行(导弹无垂直速度并严格按直线飞行)和不规则飞行(导弹有垂直速度并非直线飞行)2方面对弹体进行定位讨论。同时指出在导弹规则飞行时,定位误差实际上只受斜距误差的影响,故只要知道斜距误差便可知定位误差;在不规则飞行情况时,导弹定位的误差要大得多,同时受斜距误差和速度误差的影响。
文献[28]指出,对低空飞行器(如巡航导弹)而言,姿态角的影响很小(当成像传感器倾角误差为0.1°时,引起地距偏移量为0.3~0.5 m),因而低空飞行器一般不考虑姿态角的影响。当飞行器在2 000 m的高度飞行时,姿态角的微量变化和地形起伏会引起成像底点较大的偏移。此结论虽是对光学成像而言的,但对SAR图像匹配制导仍有借鉴意义。
需要说明的是,导弹惯导系统的瞬时精度很高且不受外在干扰的影响,因而惯导给出的数据足以用来对SAR成像作运动补偿。但惯导系统误差随时间而增加,图像匹配的精度较高反过来又可以用来修正惯导积累误差,这使得SAR组合导航系统有较高的制导精度。
5 导航制导误差
由前面所述可知,SAR成像需要多普勒频移,故通常的弹载SAR条带成像时,一般采用正侧视或前侧视方式而成像,在末制导阶段应采用前侧视方式成像,这就决定了其弹道方向不能直接指向目标,而应是弧线状的弹道,一般要作C或S形的机动。这就给SAR制导尤其是末制导阶段施加了特定的要求。
文献[29]指出成功的作战中SAR制导(采用多普勒锐化方法)必须满足一些要求,比如,实时图必须有足够高的分辨力以鉴别目标、图像必须提供给制导滤波器足够的信息以精确的确定目标位置、导弹最好以较理想的速度和角度来撞向目标来获得最大的杀伤力等,并应用弹道优化技术来规划弹道以满足这些要求。该文论证了通过优化弹道可以在末制导阶段获得较好的图像质量以确认目标,并且可获得较低的脱靶量。
文献[30]研究了空地导弹的弹道优化问题。该文以图像寻的巡航导弹为背景,指出图像寻的方式给导弹的弹道带来了约束(和多普勒锐化雷达有关的约束、末端角度的约束和动力学约束等),而这些约束是弹道优化必须要考虑的,并给出先是低空飞行,而后在临近目标时是拉高和俯冲的弹道,如图2所示。该文论证了临近目标时是拉高和俯冲的弹道对采用多普勒锐化式成像雷达的,应用Bank-To-Turn(倾斜转弯)方法控制的导弹的弹道很有效,并引申了多普勒成像闭环制导律问题。
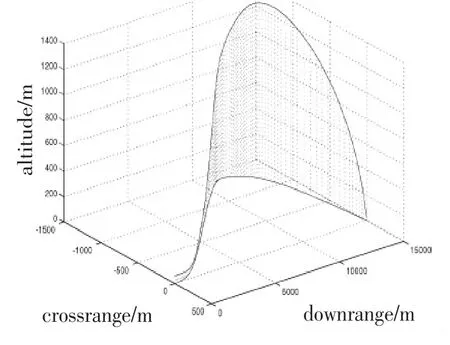
图2 SAR末制导三维弹道Fig.2 3-D trajectory of SAR terminal guidance
SAR末制导阶段由于需要获取多普勒频移,其弹道相比光学和普通雷达制导要有较多的约束,它的工作模式要求其弹道必须是弧线弹道,另外由于动力学和攻击角度等的约束,导弹制导精度受较多因素的影响,目前虽然已经有人做了弹道优化的工作,但“优化弹道”性能怎样以及其影响因素仍具有研究价值。
6 结论
综上,研究人员对影响SAR制导系统性能的因素做了较多的研究工作,实时图获取、预处理和匹配算法方面的研究较多,主要集中于去畸变、增强匹配算法(包括预处理算法)适应性、减少计算量提高算法速度等问题,研究方法也较多。基于匹配结果(匹配精度和配准图分辨力)研究导弹定位精度的研究较少。SAR末制导阶段对弹道的要求较高,因为要考虑成像方式(如多普勒锐化、聚束等)的约束、动力学的约束和攻击角度等约束,给制导带来了较多的影响,同时也影响末制导的精度。一般而言,SAR末制导阶的弹道多采用弹道优化技术来规划,由于要考虑的因素较多实现起来较为复杂。
对这些SAR制导系统的影响因素的分析对综合地研究SAR制导系统性能提供了很有价值的结论和研究方法。
发展趋势和尚存在的问题:①这些研究多是基于SAR制导系统的某一方面对整个系统的影响的,而对整个系统的建模和仿真是未来的一个研究方向;②现有的研究,理论分析和计算机仿真较多,但理论分析和仿真毕竟和实物有差距,结合半实物、实物仿真的研究是一个发展趋势;③由于实验条件的限制,基于飞机导航的研究较多,而对导弹制导的研究较少,开展实验及分析较为困难。
[1]CURLANDER J C,MCDONOUGH R N.Synthetic aperture radar:systems and signal processing[M].New York:Wiley,1991:103-165.
[2]孙仲康,沈振康.数字图像处理及其应用[M].北京:国防工业出版社,1986:233-235,307-309. SUN ZHONGKANG,SHEN ZHENKANG.Digital image processing and its applications[M].Beijing:National Defense Industry Press,1986:233-235,307-309.(in Chinese)
[3]贺柏根,朱明.改进的抗全仿射尺度不变特征变换图像匹配算法[J].光学精密工程,2011,19(10):2472-2477.HE BAIGEN,ZHU MING.Improved fully affine invariant SIFT-based image matching algorithm[J].Optics and Precision Engineering,2011,19(10):2472-2477.(in Chinese)
[4]邱建国,张建国,李凯.基于Harris与Sift算法的图像匹配方法[J].测试技术学报,2009,23(3):271-274. QIU JIANGUO,ZHANG JIANGUO,LI KAI.An images matching method base on harris and sift algorithm[J]. Journal of Test and Measurement Technology,2009,23(3):271-274.(in Chinese)
[5]李壮,雷志辉,于起峰.基于梯度径向夹角直方图的异源图像匹配[J].测绘学报,2011,40(3):318-325. LI ZHUANG,LEI ZHIHUI,YU QIFENG.Matching multi sensor images based on gradient radius angle pyramid histogram[J].Acta Geodaetica et Cartographica Sinica,2011,40(3):318-325.(in Chinese)
[6]汪洪桥,赵宗涛,蔡艳宁,等.景象匹配技术在巡航导弹制导中的应用研究[J].战术导弹控制技术,2005,48(1):33-36. WANG HONGQIAO,ZHAO ZONGTAO,CAI YANNING,et al.Research of application on scene matching technology to cruise missile control and guidance[J].Control Technology of Tactical Missile,2005,48(1):33-36.(in Chinese)
[7]丁鹭飞,耿富录.雷达原理[M].3版.西安:西安电子科技大学出版社,2003:163-168. DING LUFEI,GENG FULU.Radar principle[M].3rd ed. Xi'an:Xidian University press,2003:163-168.(in Chinese)
[8]梁勇,邓方林.巡航导弹制导技术的现状及发展趋势分析[J].中国航天,2003(8):35-41. LIANG YONG,DENG FANGLIN.Present situation and development trend of cruise missile guidance technology analysis[J].Aerospace China,2003(8):35-41.(in Chinese)
[9]彭双春,刘光斌,刘冬.干扰条件下的景象匹配模型分析[J].盐城工学院学报:自然科学版,2004,17(4):47-49. PENG SHUANGCHUN,LIU GUANGBIN,LIU DONG. A preliminary analysis of image matching model underinterference[J].Journal of Yancheng Instituteof Technology:Natural Science,2004,17(4):47-49.(in Chinese)
[10]BVAK M N.Radar target detection and map-matching algorithm studies[J].IEEE Transacations Aerospace and Electronic Systems,1980,16(5):620-625.
[11]张俊.图像匹配与雷达地图匹配制导中匹配技术研究[J].通信与测控,1998,20(5):43-48. ZHANG JUN.Image matching and guidance radar map matching matching technology research[J].communications and control,1998,20(5):43-48.(in Chinese)
[12]赵锋伟,李吉成,沈振康.景象匹配技术研究[J].系统工程与电子技术,2002,24(12):110-113. ZHAO FENGWEI,LI JICHENG,SHEN ZHENKANG. Scene matching technology[J].Systems Engineering and Electronics,2002,24(12):110-113.(in Chinese)
[13]张天序,蔡世学.雷达与光学景像共性特征提取与匹配算法研究[J].红外与激光工程,1996,25(3):15-20. ZHANG TIANXU,CAI SHIXUE.Radar and optical scene common feature extraction and matching algorithm [J].Infrared and Laser Engineering,1996,25(3):15-20.(in Chinese)
[14]LOWE D G.Object recognition from local scale-invariant features[C]//The Proceedings of the Seventh IEEE International Conference.IEEE,1999:1150-1157.
[15]BAY H,TUYTELAARS T,VAN GOOL L.SURF:speeded up robust features[M].Berlin Heidelberg:Springer,2006:404-417.
[16]RATKOVIC J A.Performance considerations for image matching systems,N-1217-AF[R].1979:32-33.
[17]黎明,姜长生,朱荣刚,等.巡航导弹末制导的景象匹配快速算法[J].弹箭与制导学报,2006,26(1):872-877. LI MING,JIANG CHANGSHENG,ZHU RONGGANG,et al.Cruise missiles homing fast scene matching algorithm[J].Missiles and Guidance,2006,26(1):872-877.(in Chinese)
[18]FAIRMAN B A,LARSEN A J,SWINTON W G,et al. Computer address modification system with optional DMApaging:U.S.,4849875[P].1989.
[19]ZITOVA B,FLUSSER J.Image registration methods:a survey[J].Image and Vision Computing,2003,21(11):977-1000.
[20]LO T K,GERSON G.Guidance system position update by multiple subarea correlation[C]//1979 Huntsville Technical Symposium.International Society for Optics and Photonics,1979:30-40.
[21]WARD A M R.Sensor driven Computing[D].London:University of Cambridge,1998.
[22]赵锋伟.景象匹配算法,性能评估及其应用[D].长沙:国防科学技术大学,2002:3-6.ZHAO FENGWEI.Scene matching algorithm,performance evaluation and its application[D].Changsha:National Defense Science and Technology University,2002:3-6.(in Chinese)
[23]金善良,梁文宝.下视景像匹配算法性能评估[J].红外与激光工程,1997,26(6):1-3. JIN SHANLIANG,LIANG WENBAO.Downward-looking scene matching algorithm performance evaluation[J]. Infrared and Laser Engineering,1997,26(6):1-3.(in Chinese)
[24]韩先锋,李俊山,孙满囤,等.巡航导弹景象匹配算法适应性研究[J].微电子学与计算机,2005,22(7):53-57. HAN XIANFENG,LI JUNSHAN,SUN MANTUN,et al. Adaptability cruise scene matching algorithm[J].Microelectronics&Computer,2005,22(7):53-57.(in Chinese)
[25]熊凌.计算机视觉中的图像匹配综述[J].湖北工业大学学报,2006,21(3):171-173. XIONG LING.Overview of image matching in computer vision[J].Journal of Hubei University of Technology,2006,21(3):171-173.(in Chinese)
[26]PLUIM J P W,MAINTZ J B A,VIERGEVER M A.Mutual information matching in multiresolution contexts[J]. Image and Vision Computing,2001,19(1):45-52.
[27]李亚超,蓝金巧,邢孟道,等.SAR末制导中导弹定位方法及分析[J].遥测遥控,2004,25(6):29-34. LI YACHAO,LAN JINQIAO,XING MENGDAO,et al. SAR homing missiles positioning method and analyzed [J].Remote Telemetry,2004,25(6):29-34.(in Chinese)
[28]邵永社,陈鹰,祝小平.利用影像匹配和摄影测量实现无人机精确导航[J].测控技术,2006,25(8):79-82. SHAO YONGSHE,CHEN YING,ZHU XIAOPING.Use image matching and accurate navigation UAV photogrammetry[J].Measurement and Control Technology,2006,25(8):79-82.(in Chinese)
[29]EREMYA HODGSON.Trajectory optimization using differential inclusion to minimize uncertainty in target location estimation[R].San Francisco,AIAA:2005:1-16.
[30]FAROOQ A,LIMEBEER D J N.Bank-to-turn missile guidance with radar imaging constraints[J].Journal of Guidance,Control and Dynamics,2005,28(6):1157-1170.
Analysis of SAR Scene Matching Guidance Acuracy Influencing Factors
ZHANG Dong-xing1,JIA Xing-liang2,LI Xiang-ping1,ZHU Ming-bo1,YIN Yong3
(1.Department of Electronic and Information Engineering,NAAU,Yantai Shandong 264001,China; 2.Xi'an Bureau of Naval Equipment Department,Lanzhou 730070,China; 3.The 91436thUnit of PLA,Liuzhou Guangxi 545613,China)
Synthetic aperture radar(SAR)has the advantages like high resolution,all-weather and so on.It is considered to be a powerful tool to improve guidance accuracy of precision gaided weapon.Guidance precision was an important performance measurement of precision-guided weapons.The main factors affect the accuracy of SAR guidance system are scene matching errors,real-time imaging acquisition and pretreatment errors,inertial measurement errors,navigation guidance errors caused by the SAR guidance trajectory.The studies on SAR guidance accuracy of the influencing factors were described.The research and the conclusions were comparied and analized.The existing problems in the research and development direction were pointed out.
SAR images;scene matching;guidance accuracy
TP391
A
1673-1522(2014)01-0019-06
10.7682/j.issn.1673-1522.2014.01.005
2013-09-24;
2013-11-15
“泰山学者”建设工程专项经费资助项目
张东兴(1981-),男,博士生。
