全液压自动猫道翻板机构动力学仿真分析*
2014-07-05李艳娇谭志松
□ 李艳娇 □ 于 萍 □ 谭志松 □ 张 鹏
吉林大学 机械科学与工程学院 长春 130025
当前,国内井场钻井平台作业施工中,钻具上下钻台过程仍以人工操作为主,其劳动强度大而且不安全,不能满足石油钻井、大陆科学钻探等频繁上下钻杆的要求[1]。为此,结合我国深部大陆科学钻探的施工要求,笔者自主研发了全液压自动猫道。翻板机构是全液压自动猫道的重要组成部分,其作用是将钻杆从平台平面翻转到举升滑道内,通过调整液压缸杆的伸出速度,使钻杆平稳地进入举升滑道内[2]。
1 翻板机构机构设计
翻板机构模型简图如图1、图2所示,由图可知翻板机构的工作原理是:当钻杆被平台上的挡销挡住,停放在平台上初始速度为零(或者具有一定的初速度)时,翻板机构开始运动,靠近举升滑道侧的液压缸1保持压力不动,起到旋转支点的作用。控制靠近平台侧的液压缸2,使其液压缸杆伸出,将翻板组件绕着液压缸1的支点旋转,通过控制液压缸2的流量,从而控制翻板组件的翻转角度,使钻杆通过翻板组件的速度保持稳定,从而平稳的滚落[3]。
2 翻板机构运动学仿真
钻杆在翻板机构上面滚落时,必须绕过平台上的挡销,这给钻杆滚落增加难度,因而对钻杆滚落速度的控制,也就是对翻板机构中的液压缸起升的控制显得尤为重要[4],针对不同的钻杆翻板机构驱动函数的确定、钻杆滚落速度、钻杆与翻板机构的接触力的测量,这些数据将为实际调试过程提供理论依据。
2.1 翻板机构仿真模型
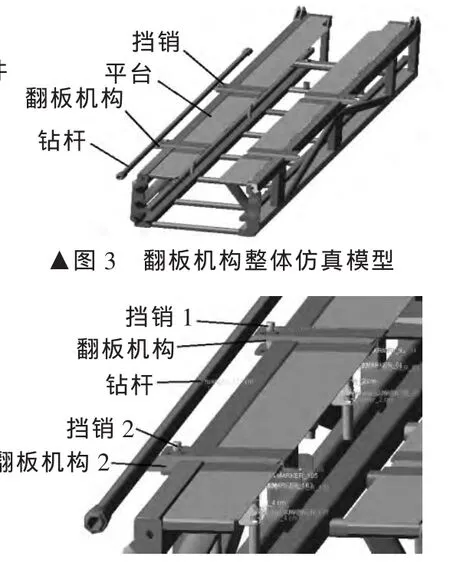
利用ADAMS软件,建立翻板机构仿真模型,如图3、图4所示,在翻板机构翻转时,对不同型号的钻杆进行分析,从而得到钻杆运动过程中的受力以及运动曲线[5]。

▲图2 翻板机构运动示意图
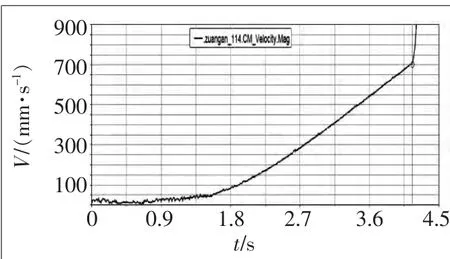
▲图4 翻板机构局部仿真模型
2.2 翻板机构仿真曲线
对直径为114、127、146mm3种型号的钻杆进行运动学及动力学仿真并比较分析,总结出适合钻杆的驱动函数,从而提高输送钻杆的能力。
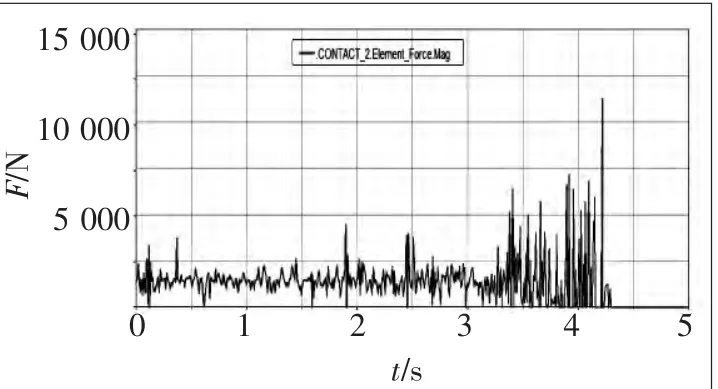
针对114钻杆进行仿真分析,测出钻杆的运动质心速度变化。设定驱动函数为STEP(time,0,15,0.5 , 20 )+STEP (time , 0.5 , 0 , 1 ,10 )+STEP(time,1,-20,5,-30)。
由图5曲线可知,在t=4.414s时,钻杆的速度为704mm/s,即钻杆滚离平台的时间和速度。
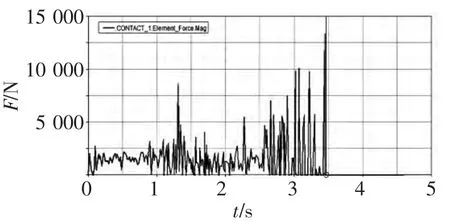
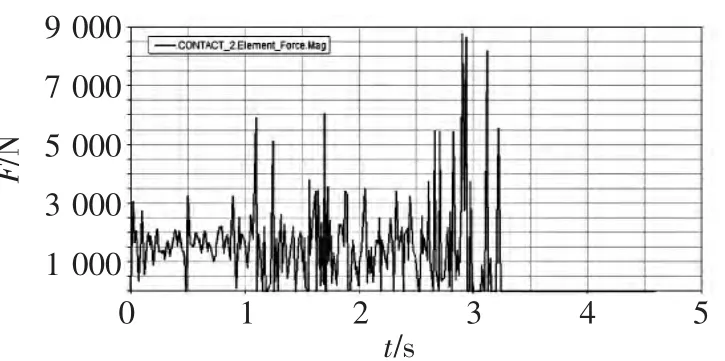
图6与图7所示为钻杆与翻版机构碰撞力示意图,钻杆与翻板机构接触力呈震荡曲线变化,当速度变大后,钻杆与翻板机构之间的碰撞越严重,所以在保证时间的基础上,要控制钻杆滚落速度。
针对127钻杆,当设定127钻杆的驱动函数与114钻杆相同时,127钻杆会被挡销挡住,因而改变驱动函数为 STEP (time,0,5,0.5,15)+STEP(time,0.5,0,1,15)+STEP(time,1,-20,5,-30),此时钻杆可以顺利绕过挡销,滚过翻板机构,图8为127钻杆质心速度变化曲线示意图。
▲图5 114钻杆质心速度曲线

▲图6 114钻杆与翻板机构1碰撞力曲线
▲图7 114钻杆与翻板机构2碰撞力曲线

▲图8 127钻杆质心速度变化曲线
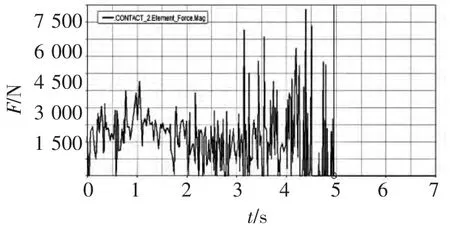
▲图9 127钻杆与翻板机构1接触力曲线
▲图10 127钻杆与翻板机构2接触力曲线

▲图11146钻杆质心速度曲线

▲图12 146钻杆与翻板机构1接触力曲线图
▲图13 146钻杆与翻板机构2接触力曲线图
由图8可知,钻杆在t=3.455s时滚离翻板机构,此时的速度为1184mm/s,钻杆滚落速度较平稳。
由图9与图10可知,127钻杆与翻板机构接触力呈波动变化,钻杆与翻板机构之间运动为滚动,随着速度增大,振动的幅度也在增大。
针对146钻杆,设定驱动函数STEP(time,0,10 , 0.3 ,20 )+STEP(time, 0.3,0 , 1 , 10 )+STEP(time,1,0,3,0)+STEP(time,3,-20,7,-30)时,由图11可知,钻杆在t=3.5s之前运动较平稳,3.5s以后钻杆在重力作用下速度线性增长,当t=4.98s时,钻杆脱离翻板机构时的速度为1035mm/s。
由图12与图13可知,翻板机构受力较平稳,但是在个别时间点会出现碰撞现象。
通过对114、127、1463种常用的钻杆进行运动学与动力学分析,观察比较114钻杆与127钻杆的滚落时间可知:随着钻杆直径的增大,钻杆质量以及钻杆在翻板机构上的滚落速度也随之增大。从而在控制翻板机构举升速度时,要根据不同的钻杆而定。通过对114、127钻杆与146钻杆速度之间的比较,由于146钻杆质量较大,从而导致钻杆在翻板机构上滚落速度是很快的,要通过调整驱动函数来减慢146钻杆的滚落速度。
3 结论
(1)通过控制液压缸活塞杆的驱动速度得到适合钻杆滚落的驱动函数,在保证时间的前提下,使直径为114、127、147mm的3种钻杆在翻板机构上面的滚落速度减小。
(2)通过钻杆与翻板机构的接触力曲线以及翻板机构1与翻板机构2所受到的接触力之间进行比较,得到结论:钻杆与翻板机构之间接触力曲线呈波动并存在碰撞现象,翻板机构1与翻板机构2所受到的接触力曲线大体相同,但是存在个别冲击现象。
[1] 赵淑兰.动力猫道技术国内外现状和发展趋势[J].石油矿场机械,2010,39(2):13-15.
[2] 尹晓丽.钻杆自动传送系统及设计方案[J].石油矿场机械,2009,38(7):42-46.
[3] 寇红涛.液压动力钻杆排放猫道设计及应用[J].石油机械,2008,36(9):29-30.
[4] 刘承建.液压猫道装置[P].中国专利:CN101761313A,2010-06-30.
[5] 郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2007.
