某流线型观测用水下机器人艏部的改进设计
2014-07-05金碧霞熊传志
□ 金碧霞 □ 熊传志
中国船舶重工集团 第七一〇研究所 湖北宜昌 443003
随着水下机器人应用领域的不断扩宽,水下机器人技术也成为研究热点,目前水下机器人已成为水下观测和水下作业最有效的装备[1]。某观测用水下机器人由艏部半球形迎流段、舯部圆柱形平行段、艉部圆锥形去流段组成流线型外形,从而可减小水流阻力,降低能耗。其艏部装载有照明灯、摄像机、声纳等观测设备,可用于查找江、河、湖、海的各种堤坝的裂缝、破损等质量问题,还可用于观测水底地形、地貌或搜寻水下沉物。为最大视角地对目标进行观察识别,艏部装有一套俯仰机构,观测设备可在俯仰机构电机的驱动下,在-90~45°较大范围的纵截面(垂直面)角度内进行俯仰动作。
1 存在问题
机器人艏部最初的设计采用了如图1所示的整体式结构,即艏部壳体为一个开有窗口的耐压壳体,照明灯、摄像机、俯仰机构安装在球壳内部,声纳安装在壳体底部的一个平台上,通过水密接插件和水密电缆实现电气连接。球壳左右两侧各有一个平台,通过连接杆实现与舯部的机械连接,同时电缆从连接杆的空心管中穿过到达舯部,实现与舯部的电气连接。
为保证机器人水下作业的安全性,在壳体内部安装了自行研制的漏水安全监测器,在壳体最下方铺设金属导线探针,若舱内漏水达到了一定程度,探针短路,会向控制软件发出漏水报警信号,以便进行应急处理。照明灯玻璃、摄像机玻璃与球窗采用O型圈径向密封,孔用弹性挡圈止位。俯仰机构传动原理如图2所示,固定齿轮作为太阳轮,旋转小轮作为行星轮,固定旋转板作为行星架组成行星轮系。固定旋转板一端与艏部筒体固定,另一端通过轴承支承在支撑轴上。将电机减速器固定安装在固定旋转板上,在电机及减速器的驱动下,旋转小轮(行星轮)除了绕减速器输出轴自转外,还绕支撑轴沿着固定齿轮(太阳轮)旋转,带动艏部筒体沿支撑轴旋转,从而带动观测设备完成俯仰动作。

▲图1 整体式艏部外形结构图
在加工和水下机器人湖试中发现,这种艏部设计存在以下缺点。
(1)工艺复杂,加工制造成本高。为保证壳体的水密性、强度及尺寸精度,壳体如采用整块铝合金板料大面积掏空加工,会造成原材料的大量浪费;如采用焊接结构,则要对所有焊接部位进行探伤,同时要采用高温回火等复杂的热处理工艺,来消除焊接残余应力,以稳定尺寸结构。为避免海水腐蚀对壳体造成损坏,壳体采用了复杂的表面处理工艺,如壳体成型后进行阳极氧化、铬酸盐封闭处理以及外表面喷涂防腐漆等。

▲图2 整体式艏部俯仰机构传动原理示意图
(2)外置的头部连接杆会影响水下机器人的流线型外形,从而增大了水流阻力和功耗。虽然考虑了增加导流罩进行整流,但效果并不理想。
(3)观测设备及俯仰机构密封在壳体内,导致壳体存在多处密封,降低了其安全性。只要有一处漏水,就有可能造成所有功能设备的损坏,同时对于漏水的部位也难以进行检测。
(4)由于选用的声纳是通过机械旋转来实现声学扫描,安装在平台底部的声纳在扫描过程中会对水下机器人形成一定的舵效应,进而影响到水下机器人运动的稳定性和操控性。
(5)在水下机器人悬停对目标进行近距离观察识别时,一般要进行俯仰动作。其俯仰动作会对水下机器人产生较大的扰动,影响到水下机器人姿态的平稳性。因此常将要进行俯仰动作的部组件设计成零浮力,以保证其在水中的静平衡。此种结构要在艏部壳体内安装大量的压载,才能保证其艏部在水中的静平衡。但在实验室和母船上对俯仰机构进行调试和功能检查时,其附加的压载会加重电机的负荷,降低其使用寿命。如采用将压载去掉,又会增加额外的装配时间。

▲图3 分体式艏部外形结构图
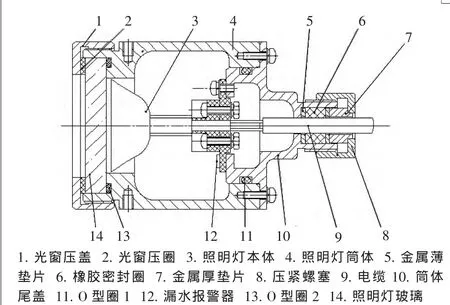
▲图4 水下照明灯结构图
(6)照明灯、摄像机均安装在球壳内,存在一定的视觉盲区。
2 改进设计
2.1 方案制定
针对以上艏部在加工和试验中出现的问题,对艏部进行了改进设计。采用“整体开放、局部密闭”的设计思路,设计了一种分体式的艏部(如图3所示)。艏部壳体采用玻璃钢材料制作轻质壳体结构,由左外壳、中间球壳和右外壳组成。中间球壳由开有观测窗口的前导流罩和后导流罩组成,可进行俯仰动作。照明灯、摄像机按功能模块分别独自密封,形成独立的模块单元。由上安装板、下安装板、左法兰盘、右法兰盘、支撑转轴组成一个可进行俯仰动作的云台,观测设备安装在云台上。为达到更好的观察效果,增加了两个远光灯,安装在左右外壳的筒体内,并与水下机器人轴线成一定角度向下。为减小悬停观察时俯仰动作对水下机器人姿态稳定性的干扰,云台和中间球壳在水中可保持静平衡,并且其俯仰中心与其浮心重合。
2.2 水下照明灯设计
为保证照明灯在水下工作时安全和可靠,将照明灯本体密封在一个耐压筒体内形成水下照明结构,如图4所示。照明灯本体固定在筒体尾盖上,有利于照明灯的换装及电气接线。尾盖与照明灯筒体采用O型圈1密封,螺钉连接。照明灯筒体前部的密封由照明灯玻璃、O型圈2、带有螺纹的光窗压盖组成。为防止光窗压盖旋紧时对照明玻璃的损坏,在两者之间增加了一个由聚四氟乙烯材料制作的光窗压圈。照明灯与外部的电气连接采用压缆密封方式来实现,其压缆密封由金属薄垫片、橡胶密封圈、金属厚垫片、压紧螺塞、电缆组成。经过在实际水下环境中的实验证明,这样的电气连接接口,即使在水中承受一定的水压,也能保证信号与能源安全正常的传输。在水下照明灯筒体上加工有螺纹孔,通过螺钉连接,实现水下照明灯与外部云台(或左外壳、右外壳)的机械对接。

▲图5 水下摄像机结构图

▲图6 俯仰机构简图
2.3 水下摄像机设计
水下摄像机结构设计与水下照明灯结构设计一致,其结构图如图5所示。由上安装板、连接板、下安装板、辅助支撑块组成摄像机本体的安装架,将摄像机本体固定在安装架后,通过连接板与筒体尾盖连接。其电气接口采用压缆密封方式来实现,机械接口由筒体上的螺纹孔与云台用螺钉进行连接。
2.4 水下俯仰机构设计
水下俯仰机构由传动机构和俯仰角度检测机构组成,传动机构采用具有自锁功能的蜗轮蜗杆传动,俯仰角度检测机构通过电位器来测量俯仰角并反馈给控制系统。其结构如图6所示。
3 设计难点
水下照明灯与水下摄像机的相对位置直接影响到水下机器人的观测效果。譬如,把光源放在摄像机的正前面照射被照物体时,就会把摄像机正前面水中漂浮的悬浊物照得很亮,从而难以得到被照物体的像差,图像很难清晰。同时由于光在水中的衰减,要取得理想的观测效果,就要选择照明装置和摄像机相对观测区的最有利的位置,对镜头视场角和照明装置光通量出射角进行协调,以增强水下视距。因此在设计水下机器人时,应从水下机器人接近观测对象的能力、保持静止或准确移动的能力以及所选用摄像机的视距、视角、照明装置的照度、水质情况等因素加以全面考虑,以求得最佳配置[1]。由于设计的水下机器人为增加观测的视场角,观测设备安装在一个可进行俯仰动作的云台上,为减小其俯仰动作对水下机器人姿态平稳性的扰动,其整个俯仰部分在水中要具有零浮力,并且其俯仰中心在其浮心上。因此,在布置观测设备时,要综合考虑水下机器人的观测效果和运动的平稳性,以求得最佳的匹配。
4 总结与试验
与原艏部相比,改进后的艏部具有以下优点:①由于壳体采用了抗腐蚀性好、质量轻、成形方便、建造快、修理容易的玻璃钢材料制作,使其成本低廉,工艺简单。②所有机械结构件均内置于球壳,结构紧凑,没有外部附件,不会增加额外的水流阻力,对水下机器人起到了较好的整流作用。③将观测设备按不同的功能密封,形成了各自独立的模块单元,在每个独立的功能模块内部均安装了漏水检测传感器,并将其分别接在不同的I/O端口,一旦水下机器人发生漏水报警,即可快速具体地判断每个模块舱的安全情况,提高了检测效率。④声纳内置于中间球壳里面,消除了原来的舵效应影响,提高了水下机器人运动控制精度。⑤俯仰云台不用额外增加压载或浮力材料,在结构上很容易实现水中静平衡。⑥增加了两个远光灯,提高了水下照明效果。
改进后的水下机器人在湖北漳河和广州珠江进行湖试,试验结果表明,水下机器人在相同的航速下,推进器功率相比之前较小,同时提高了其水下照明和观察效果,且水下机器人的运动更易控制。改进后的艏部,为水下机器人的高效运行提供了有效的硬件基础。
[1] 蒋新松,封锡盛,王棣棠.水下机器人[M].沈阳:辽宁科学技术出版社,2000.
