基于蒙特卡洛法的舰艇规避鱼雷效能推演评估*
2014-07-05李明辉闵绍荣谢红胜
李明辉 闵绍荣 谢红胜
(中国舰船研究设计中心 武汉 430064)
基于蒙特卡洛法的舰艇规避鱼雷效能推演评估*
李明辉 闵绍荣 谢红胜
(中国舰船研究设计中心 武汉 430064)
研究水面舰艇有效机动规避声自导鱼雷的问题,以提高舰艇对抗来袭鱼雷的作战效率。针对以往舰艇规避鱼雷二维对抗态势模型的不足,建立了三维空间下的鱼雷弹道模型、自导检测模型、舰艇规避模型以及鱼雷对抗误差模型,运用Matlab工具,对舰艇机动规避鱼雷的对抗过程进行了推演,并采用蒙特卡洛法定量分析了影响舰艇规避鱼雷生存概率的主要因素。推演结果表明,规避航向和航速对舰艇生存概率有较大影响,根据鱼雷报警距离和报警舷角选择合适的规避航向/航速、提高对来袭鱼雷的报警距离和定位精度以及减少系统反应时间,可以有效提高舰艇生存概率。
蒙特卡洛法; 舰艇规避; 鱼雷防御; 舰艇生存概率
Class Number TP391
1 引言
随着鱼雷技术的不断发展,水面舰艇将面临着水下声自导鱼雷的巨大威胁。虽然水面舰艇对抗鱼雷可采用“软杀伤”、“硬杀伤”等多种干扰、诱骗、拦截等手段,但研究表明舰艇对抗鱼雷的规避方法仍是提高水面舰艇作战能力和生存能力的有效途径之一。随着水声对抗系统的发展,水下鱼雷的对抗过程仍需要舰艇机动与“软/硬杀伤”等手段的配合实施而达到最优。因此,舰艇的机动规避方法在对抗水下鱼雷攻击中具有重要的作用,是结合使用其它对抗手段的基础之一[1]。
现有对水面舰艇机动规避声自导鱼雷的研究,通常是在不考虑对抗误差的基础上,建立二维平面内的水面舰艇—鱼雷运动数学模型,仅以规避航速、航向作为决策变量进行分析,未对其它因素变量(如鱼雷报警距离、报警舷角等)作特别研究[2~4]。本文在上述研究的基础上,对水面舰艇规避鱼雷对抗模型进行了改进,基于蒙特卡洛法建立了三维态势下的舰船规避鱼雷对抗数学模型,在考虑到鱼雷对抗误差、复杂水文条件的基础上,以舰艇生存概率作为舰艇规避对抗来袭鱼雷的效能指标,定量分析了舰艇规避航速/航向、鱼雷报警舷角/报警距离、规避时机等主要因素对生存概率的影响,并在此基础上得到了有一定价值的结论。
2 对抗态势描述
全世界对舰攻击鱼雷应用较广的是美MK-48鱼雷,因此以该鱼雷为作战对象,舰艇在4km~8km的距离上发现来袭鱼雷并报警,假定此时来袭鱼雷已切断线导并进入声自导导引状态。

图1 舰艇规避对抗 来袭声自导鱼雷态势

水面舰艇:初始时沿90°航向以Vw航速匀速直航,在O点舰艇拖曳线列阵声纳发现报警舷角为Qs的鱼雷目标T,舰艇经一定系统反应时间,采取旋回转向、加速等手段防御鱼雷,以摆脱鱼雷捕获或追踪;舰艇达到规避航向、航速后保持匀速直航,期间鱼雷报警声纳持续跟踪鱼雷噪声,若有需要则转入新的规避航向。
来袭鱼雷:以有利提前角φa向预定方位射击,捕获目标前处于匀速直航搜索阶段,t时刻在被动声自导方式下发现目标,转入主动自导跟踪阶段,并采用尾追式弹道追踪舰艇,直至命中舰艇或鱼雷航程耗尽。
3 对抗数学模型
3.1 来袭鱼雷弹道模型
假定来袭鱼雷搜索弹道采用定深直航方式,追踪弹道采用尾追式,当鱼雷到达预定命中点或丢失目标进行再搜索时,采用水平面环形再搜索方式[6]。
舰艇鱼雷报警时,鱼雷初始位置坐标由式(1)计算:
(1)
其中:φxy为鱼雷—报警声纳与XY平面的夹角,Xs0、Ys0、Zs0分别为鱼雷报警时舰艇拖曳阵列声纳坐标,由式(2)求出:
(2)
式中:Ls、Hs分别为舰艇拖曳阵列声纳线缆长度和深度。
直航搜索阶段和尾追跟踪阶段的鱼雷弹道轨迹由式(3)计算:
(3)
其中,直航搜索阶段鱼雷航向由式(4)计算:
(4)
其中:φa为鱼雷射击有利提前角,Xa为鱼雷预计命中点,Dm、Qm为舰艇鱼雷报警距离和鱼雷报警舷角。
尾追跟踪阶段鱼雷航向由式(5)计算:
(5)
鱼雷环形再搜索阶段弹道轨迹由式(6)计算:
(6)
式中:Xtc、Ytc、Ztc为鱼雷环形搜索圆心坐标,Rt为环形搜索半径,wt为环形搜索角速度(左旋为正,右旋为负)。
环形再搜索阶段鱼雷航向由式(7)计算:
(7)
3.2 鱼雷声自导检测模型
本文中,鱼雷声自导检测模型由主被动声纳方程描述[7]:
1) 被动声纳方程:
DT=STL-TL-NL+DI
(8)
式中:STL为舰艇辐射声源级,TL为声波传播损失,NL为鱼雷干扰噪声级,DI为鱼雷自导接收指向性指数。
水面舰艇航速的变化将改变舰艇辐射自噪声强度,从而改变鱼雷的被动声自导作用距离。根据文献[8],舰艇辐射噪声声源级与舰艇吨位、航速的关系可近似拟合为
STL=60logK+9logT-20logF+20logD+Δ
(9)
其中:K为以节为单位的舰艇航速,T为舰艇排水吨位,F为接收机中心频率,D为以码为单位的距离,Δ取30。
声波在海水中的传播损失由式(10)进行计算:
TL=20logr+βr×10-3
(10)
2) 噪声掩蔽下的主动声纳方程:
DT=SL-2TL-NL+DI+TS
(11)
式中不同于被动声纳方程的参数为:SL为鱼雷自导发射声源级,TS为目标反射强度。其中,目标反射强度是鱼雷入射声波与目标舰艇舷角的相关函数,具有蝶形分布效应,推演时根据鱼雷-舰艇相对方位和蝶形分布函数抽样产生[9]。
3.3 鱼雷状态判断模型
1) 鱼雷捕获目标
在鱼雷定深直航搜索阶段,若使声自导装置捕获目标舰艇,必须使水面舰艇落入到自导扇面中,即满足相对距离和相对方位的约束条件。任意时刻舰艇与来袭鱼雷的相对距离Dwt和相对方位Bwt由式(12)计算:
(12)
设鱼雷自导扇面角为θ,鱼雷换能器检测阈为DT0,当满足式(13)时判定鱼雷已经捕获舰艇。
(13)
2) 鱼雷命中舰艇
设鱼雷引信动作距离为Rt,则当满足式(14)时判定鱼雷命中舰艇,舰艇规避失败:
(14)
式中:Lm、Wm分别为舰艇船长和船宽。
3) 鱼雷航程耗尽
鱼雷报警后,t时刻鱼雷的剩余航程Sl=Sr-Vt·t,当Sl=0时判定鱼雷航程耗尽,舰艇规避成功。其中,Sr为鱼雷报警时的剩余航程,可由经验公式(15)求出[7]:
Sr=St/3+1.2Da
(15)
式中St为鱼雷总航程,Da为鱼雷报警距离。
3.4 舰艇机动规避模型
以鱼雷报警时间为计时起点,经过鱼雷识别时间tr、决策反应时间tb和舰艇操纵延迟时间ty,舰艇开始规避。舰艇规避采用“旋回转向+加速”的机动方式,当舰艇旋回、加速至预定航向和航速时采取匀速直航,期间若有需要则进行新的机动规避。
1) 旋回段模型
(16)

2) 加速直航段模型
(17)
式中,aw为舰艇加速度。
3.5 对抗误差模型
1) 在鱼雷射击过程中,通常其射击误差及其散步主要包括两方面的内容:舰艇目标运动要素误差及其引起的目标散步、鱼雷航行误差及其引起的鱼雷散步。因此,鱼雷射击时,主要考虑以下误差源误差[4]:


2) 舰艇在规避来袭鱼雷时,主要考虑的误差源包括鱼雷报警距离误差ΔDm、鱼雷报警舷角误差ΔQm。

(18)
式中:Rm为各参数的观察值,σi为标准正态分布随机数。
4 数值算例及结果分析
4.1 推演计算条件
1) 某型号舰艇参数
我舰初始速度18节,最高规避航速32节,旋回半径300m,旋回角速度1.5°/s;舰艇拖曳阵列声纳线缆长度500m,深度40m~60m。根据鱼雷攻击战术原则,可认为对鱼雷的报警舷角在30°~150°之间,并将鱼雷报警距离分为远、中、近三个区域。
2) 某型号鱼雷参数
来袭鱼雷速度45节,自导扇面角90°,旋回角速度6.0°/s,直航搜索深度40m~80m,主动声源级180db,自噪声60dB,主被动检测阈20dB,鱼雷自导频率30kHz,方向性指数30dB,鱼雷总航程20000m。
为保证实验数据的精度,本文取蒙特卡洛试验次数为8000次,推演步长为0.5[10]。
4.2 对抗态势推演结果及分析
图2为第53次推演中舰艇成功规避来袭鱼雷三维态势图,图3为第65次推演中舰艇未成功规避来袭鱼雷三维态势图。

图2 舰艇成功规避来袭鱼雷态势

图3 舰艇未成功规避来袭鱼雷态势
图2和图3分别是舰艇成功、未成功规避鱼雷众多态势中的一种,本文仅以此作为代表案例进行分析。图2中,由于鱼雷报警距离较远,我舰得以在较为充裕的反应时间内进行“旋回+加速”转向,规避航向、航速选择都较为正确,因此舰艇在初始阶段逃离了鱼雷自导扇面角的搜索,来袭鱼雷经环形再搜索捕捉到舰艇时,剩余航程已经较小,最终鱼雷航程耗尽,舰艇规避成功;图3中,由于鱼雷报警距离较近,且我舰旋回规避转角较小,舰艇始终在鱼雷自导扇面之内,当两者相对距离小于鱼雷声自导作用距离时,鱼雷顺利捕获舰艇,最终追踪命中舰艇,舰艇规避失败。
4.3 舰艇生存概率推演结果及分析
舰艇规避的主要目的是保证舰艇的生命力,因此本文以舰艇的生存概率作为规避对抗效果的评估标准。
1) 规避航向对生存概率的影响
通常鱼雷报警后,舰艇的旋回机动分为“背鱼雷转向”和“向鱼雷转向”,图4、图5分别是两种转向情况下,报警舷角为右舷60°、规避速度为30kn时的舰艇生存概率随规避航向变化的趋势图。

图4 “背鱼雷转向”时舰艇生存概率
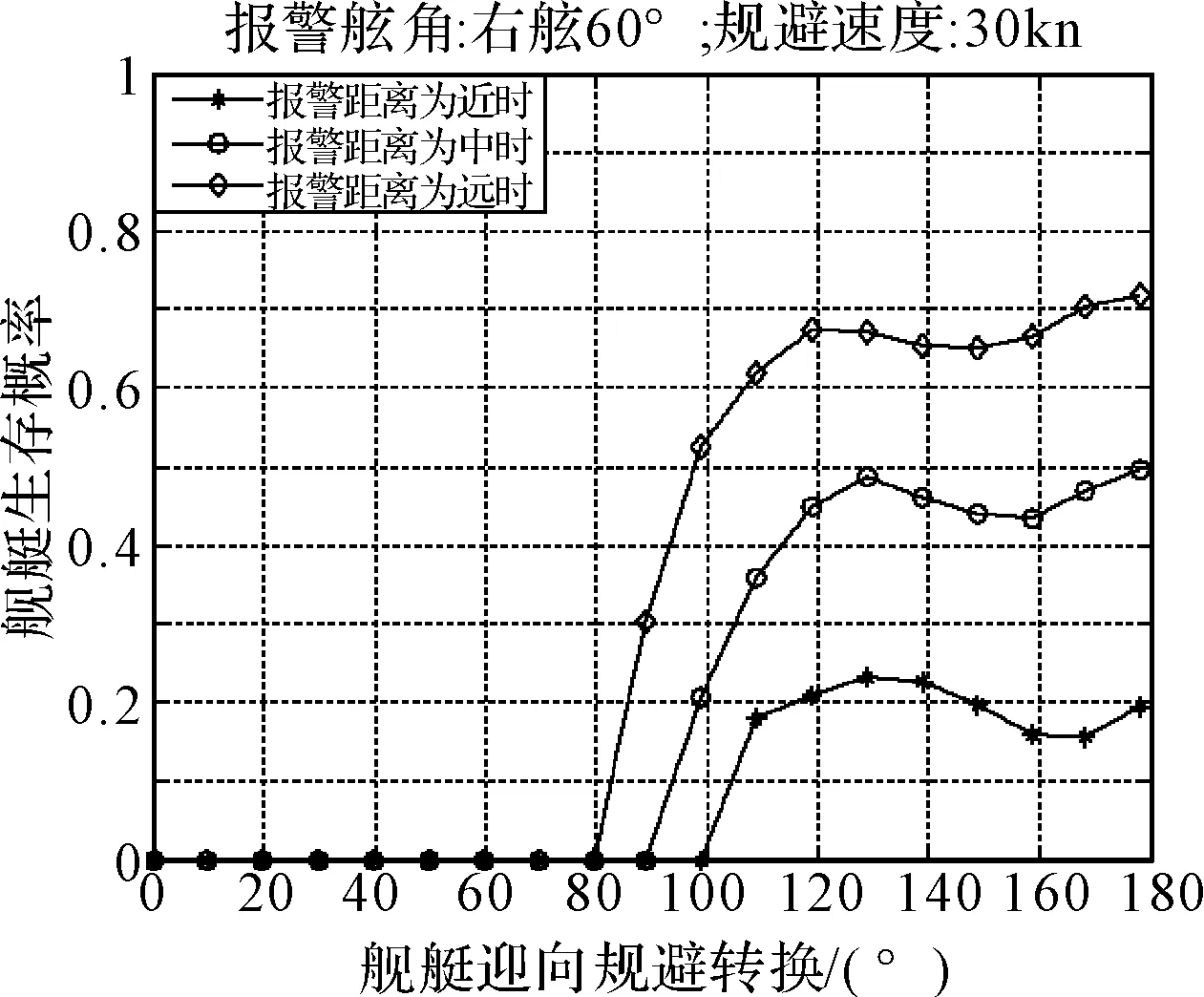
图5 “向鱼雷转向”时舰艇生存概率
由图4和图5可知:
(1)“背鱼雷转向”规避方式下的舰艇生存概率明显高于“向鱼雷转向”,两种规避方式下的曲线变化趋势大致相同。
(2)舰艇规避转向角并非越大越好,当规避转向角大于阈值40°~70°时,舰艇生存概率呈下降趋势。这是由于舰艇在旋回转向过程中,鱼雷-舰艇相对距离减小,鱼雷自导作用距离增加,而该范围内的规避转向角又无法有效逃离鱼雷自导扇面,因而使鱼雷捕获舰艇概率增加,舰艇生存概率减小。
2) 规避航速对生存概率的影响
图6~图8分别是鱼雷报警舷角为右舷120°、报警距离为近、中、远时舰艇生存概率随规避速度变化的趋势图。
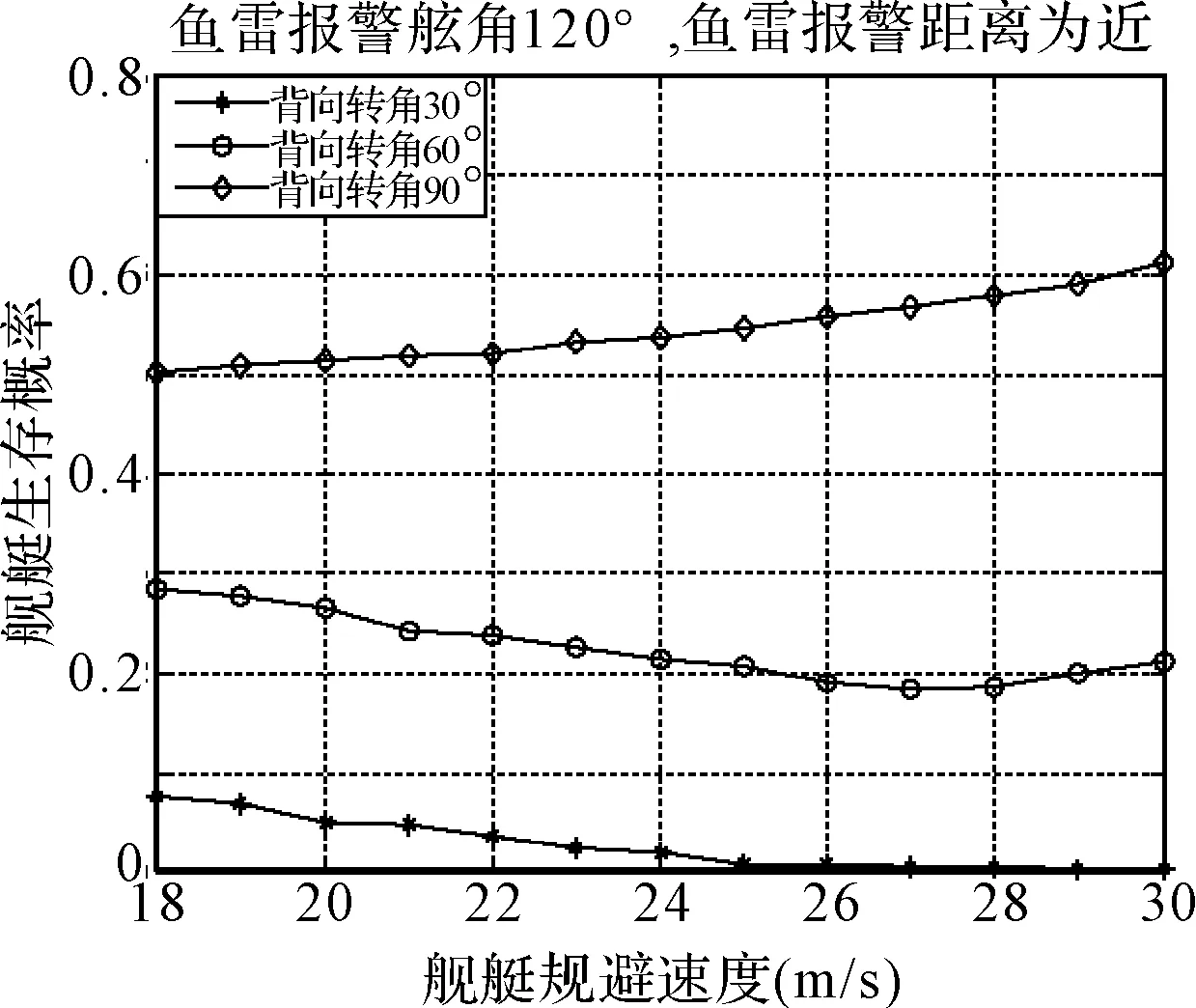
图6 “报警距离为近”时 舰艇生存概率随规避速度变化趋势

图7 “报警距离为中”时 舰艇生存概率随规避速度变化趋势
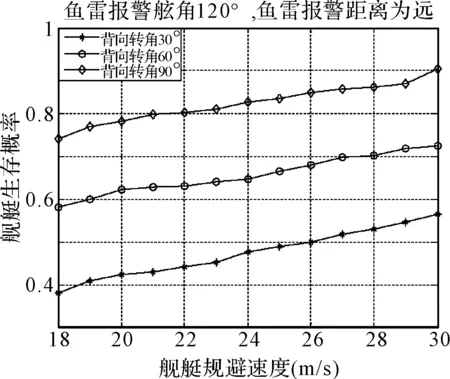
图8 “报警距离为远”时 舰艇生存概率随规避速度变化趋势
由图6可知,鱼雷报警距离较近时,舰艇规避速度并非是越大越好。鱼雷报警距离较近且规避转向角较小时,舰艇不能轻易加速,以免降低舰艇生存概率。这是由于舰艇加速时,舰艇自噪声强度变大,鱼雷自导作用距离增加,从而使鱼雷捕获舰艇概率增大。
由图7~图8可知,鱼雷报警距离为中、远区间,且舰艇规避转角较大时,舰艇生存概率随规避速度的增加而增大,规避效果明显。
3) 报警舷角对生存概率的影响
图9为舰艇背向规避转向角为60°、规避速度为30kn时,舰艇生存概率随鱼雷报警舷角变化的趋势图。

图9 舰艇生存概率随鱼雷报警舷角变化趋势
如图所示,舰艇生存概率曲线随鱼雷报警舷角变化呈两端低中间高的抛物线态势,在相同的鱼雷报警距离下,当鱼雷报警舷角较小或较大时,来袭鱼雷相对我舰方位的变化较小,舰艇需要更多的旋回转向以逃离鱼雷自导扇面角,因此该阶段内的舰艇生存概率相对较小。
综合图4~图9可知:
(1)舰艇规避航向的选择应以鱼雷报警距离和报警舷角为决策变量:鱼雷报警距离较近或报警舷角较小时,以舰艇生存概率曲线变化趋势选择合适的背向规避转角;鱼雷报警距离为中、远,或报警舷角较大时,应选择较大的背向规避转角。
(2)舰艇规避航向的选择应以鱼雷报警距离和报警舷角为决策变量:当鱼雷报警距离较近时,应以规避鱼雷自导扇面为主,根据报警舷角选择合适的规避转向角,且不轻易增加规避速度;报警距离较远时,以逃离鱼雷自导作用距离为主,规避航速越高越好。
5 结语
本文提出了三维态势下的舰艇机动规避鱼雷方案的对抗效能定量分析模型,包括鱼雷弹道模型、自导检测模型、舰艇机动规避模型和对抗误差模型等。通过蒙特卡洛推演计算,定量分析了舰艇规避航速/航向、鱼雷报警舷角/距离等因素对舰艇规避鱼雷生存概率的影响,得到了有一定价值的结论。该模型可以用作鱼雷规避防御对抗效能的定量分析,为进一步研究“软、硬杀伤”鱼雷对抗手段的效能评估提供了参考。
[1] 邹振华,李守奇.水面舰艇规避自导鱼雷的建模计算与分析[J].舰船电子工程,2008,28(10):122-124.
[2] 邢昌风,李敏勇,吴玲.舰载武器系统效能分析[M].北京:国防工业出版社,2008:331-350.
[3] 高东华,章新华.舰艇规避策略对鱼雷捕获概率影响的仿真研究[J].系统仿真学报,2001(3).
[4] 孟庆玉,张静远,宋保维.鱼雷作战效能分析[M].北京:国防工业出版社,2006:78-82.
[5] 姜凯峰,周明,林宗祥.舰载反鱼雷鱼雷作战效率仿真研究[J].计算机仿真,2011,28(6):9-13.
[6] 张永,逄洪照,陈志刚,马旭勃.发射噪声背景下自导鱼雷命中概率[J].火力与指挥控制,2007(12).
[7] 杨真勇,郑援,吕海平.潜艇机动性能对使用干扰器规避主动声自导鱼雷对抗效果的影响分析[J].鱼雷技术,2011,19(2):128-133.
[8] 周智超,刘永辉.水面舰艇防潜作战模拟训练的计算机仿真研究[J].计算机仿真,2002,19(3):1-4.
[9] 卞元庆,石小龙.鱼雷反潜自导反水声对抗能力仿真分析[J].鱼雷技术,2000,8(4):112-116.
[10] 杜比.蒙特卡洛方法在系统工程中的应用[M].西安:西安交大出版社,2007:51-150.
Simulation of Vessel Evading Efficiency to Acoustic Homing Torpedo Based on Monte Carlo Method
LI Minghui MIN Shaorong XIE Hongsheng
(China Ship Design and Development Center, Wuhan 430064)
In order to study operational efficiency of vessel evasion to acoustic homing torpedo, this paper establishes a torpedo ballistic model and a vessel evasion model based on typical torpedo operational state. By using Matlab to deduct the operation process of Vessel evasion, Monte-Carlo method is adopted to calculate survival probability of vessel in different evasion factors, and the main effects on vessel’s survival probability is quantitatively analyzed when this factors changes. Deduction results indicate that the alarm range and angle of torpedo the evasion courses and velocities have a great effect on vessel’s survival probability. Choosing an appropriate evasion tactic on the basis of torpedo alarm range and angle, increasing the alarm range and orientation accuracy of incoming torpedo and decreasing the torpedo response time can effectively improve the vessel’s survival probability.
monte carlo, vessel evasion, torpedo defense, vessel’s survival probability
2013年8月3日,
2013年9月29日
国防重点实验室研保建设项目资助。
李明辉,硕士研究生,研究方向:舰船作战效能推演评估、水下作战仿真。闵绍荣,研究员,研究方向:舰船信息系统设计研究、作战系统效能评估。谢红胜,高级工程师,研究方向:舰船信息系统设计研究、作战系统效能评估。
TP391
10.3969/j.issn1672-9730.2014.02.037