基于姿态率控制的无人机目标跟踪算法
2014-07-03周洪霞唐金元
周洪霞,高 飞,任 剑,唐金元
(海军航空工程学院 青岛校区,山东 青岛 266041)
随着各国防空技术的进步,使用无人机的侦察作战能力进行远程精确打击是现代战争的有效手段。小型固定翼无人机,具有低空低速、体积小、噪音低、经济性好的特点,将成为一种侦察探测地面目标的有效手段[1]。
无人机航迹规划主要包括静态航迹规划和动态航迹规划2 个方面[2,3]。静态航迹规划是在无人机起飞前,综合考虑所有已知的约束及威胁,通过使用计算机等手段寻找出一条最优航迹作为预定航迹[4]。动态航迹规划是在飞行过程中,一些事先未知的威胁或环境变化被飞机上的传感器探测到或通过通信链被无人机感知到时,由机上重规划系统进行的更改预定航迹的过程,是在飞行中进行的,对实时性有很高的要求。动态航迹规划可以根据在线探测到的态势变化,实时或近实时重规划任务目标的能力,是无人机飞行控制系统所期望的[5]。
本文研究的基于姿态率控制的固定翼无人机目标跟踪算法属于无人机动态航迹规划,该算法指引无人机跟踪地面运动目标。
1 算法描述
由于无人机的飞行控制受到风的干扰影响较大,所以研究一种可以抗风的无人机航迹规划算法显得尤为重要。本节利用无人机和目标的相对速度和位置进行建模,推导一种基于无人机姿态控制的跟踪算法[6]。
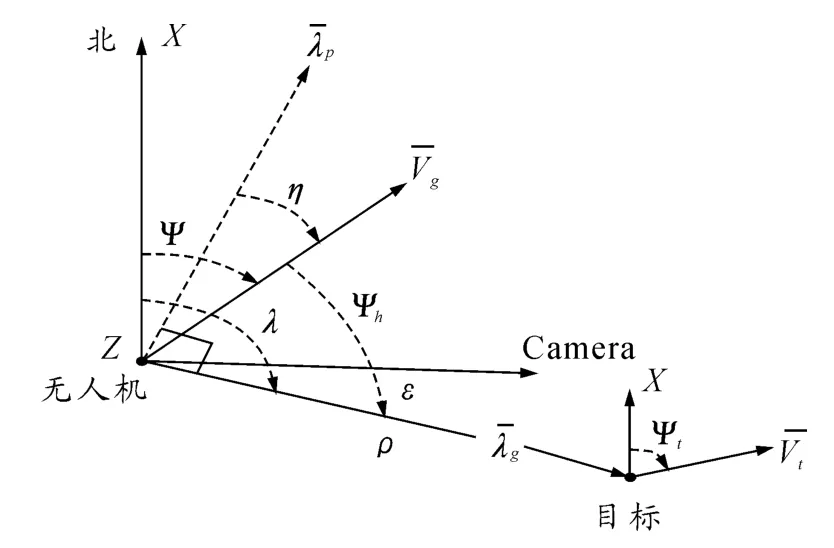
图1 无人机和目标相对位置图
由图1 可知,可以使用下面的公式来描述目标跟踪问题:
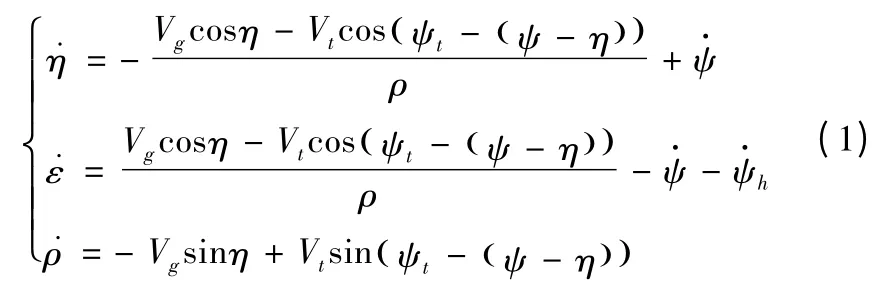
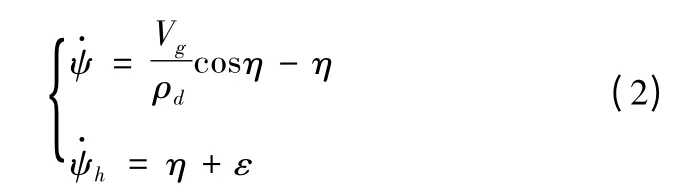
其中ρd为无人机与目标的理想距离,可以为无人机的最小转弯半径。
2 算法仿真
图2、图3 和图4 为基于姿态率控制的算法引导无人机跟踪机动目标的仿真图,左为航迹图,其中三角形为目标航迹,蓝色的线代表无人机航迹;在右图中,随着时间的增长,ρ趋于稳定。由图可以看出该算法可以很好地引导无人机对机动目标进行持续跟踪侦查,并且效果稳定。由于该算法使用的无人机速度是无人机自身测得的相对速度,所以算法抗风性较好。
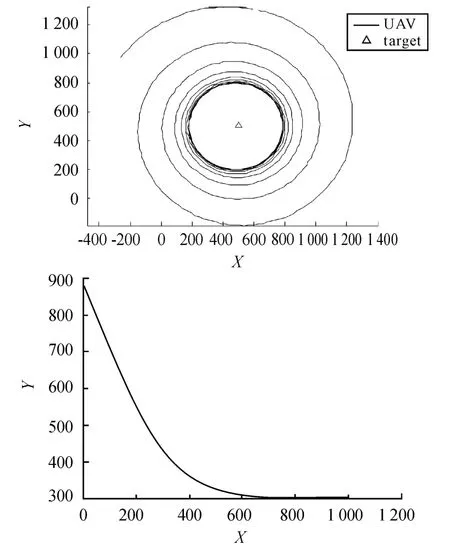
图2 无人机跟踪静止目标
图3 无人机跟踪匀速运动目标
图4 无人机跟踪机动目标
3 结束语
本文针对提高固定翼无人机对机动目标的跟踪效果,提出了一种基于姿态率控制的无人机跟踪算法。根据无人机的机动特性对系统进行了建模,并对基于姿态率控制的无人机跟踪算法进行了仿真。仿真结果表明,由于该算法使用的无人机速度是无人机自身测得的相对速度,所以算法抗风性较好,从而保证了无人机跟踪机动目标的可靠性。该研究对提高无人机跟踪目标的可靠性,从而加强无人机的军事应用有重要意义。
[1]李志宇,徐烨峰,杨国梁.跟踪海面目标的小型无人机飞行控制仿真研究[J]. 科学技术与工程,2008(3):1374-1378.
[2]Kirk E D.Optimal Control Theory[M].Englewood Cliffs,New Jersey,USA:Prentice-Hall,1970.
[3]Lawrence D A.Lyapunov Vector Fields for UAV Flock Coordination[C]// 2nd AIAA“Unmanned Unlimited”Systems,Technologies,and Operations-Aerospace. San Diego,California,USA,2003.
[4]Singer R A.Estimating optimal tracking filter performance for manned maneuvering targets[J].IEEE Trans.on Aerospace and Electronic Systems.1970,6(7):473- 483.
[5]DAM Frazzoli E,Feron E. Real-Time Motion Planning for Agile Autonomous Vehicles[J].Journal of Guidance,Control,and Dynamics,2002(25):116-129.
[6]Zhiyuan Li,Naira Hovakimyan.Vision-based Target Tracking and motion estimation using a small UAV[C]//IEEE conference on decision and control.[S.l.]:[s.n.],2010.
[7]Dobrokhodov V N,Kaminer I I,Jones K D,et al.Vision-based tracking and motion estimation for moving targets using small UAVs[C]//AIAA Guidance,Navigation and Control Conference and Exhibit.[S.l.]:[s.n.],2006.
[8]王俊,周树道,朱国涛,等. 无人机航迹规划常用算法[J].火力与指挥控制,2012(8):5-8.
