基于多源信息融合的模糊理论在引气系统故障诊断中的应用
2014-07-03邵文俊
邵文俊
(安徽民航机场集团 地勤服务部,合肥 230000)
多源信息融合[1-3]其实就是对多个传感器信息处理的过程。利用多个传感器资源,通过对这些资源信息的使用,把多个传感器在空间或时间上的冗余信息组合,从而获得比它的各组成部分的子集所构成的系统更优越的性能。多传感器信息融合的基本原理就像人脑综合处理信息一样,充分依靠多传感器资源技术,通过对这些传感器及其观测信息的有效使用,把多个传感器上在空间和时间上的冗余信息依据某一种准则进行组合。多传感器信息融合的目标是通过数据组合而不是出现在输入信息中的任何个别元素,推导出更多的有用信息。
模糊逻辑理论来源于模糊数学[4]。模糊数学是研究模糊现象的一门学科,它是用隶属函数来描述事物的模糊性。模糊集合是利用数学方法来描述模糊现象,进而使数学在具有模糊性的工程领域里也能发挥作用。
模糊故障诊断方法[5-8]是依靠模糊集合论中的模糊关系矩阵和隶属函数和来描述机械故障与征兆之间的模糊关系,进而实现对机械故障的诊断。
1 引气系统原理
各种型号的民用飞机引气系统大相径庭,以ARJ21 引气系统为例。ARJ21 引气来源有发动机引气、地面高压气源车和APU 引气。引出的气体主要为发动机起动、机翼前缘防冰、发动机进气道前缘防冰和座舱空调提供压缩空气。ARJ21 引气系统原理图如图1 所示。
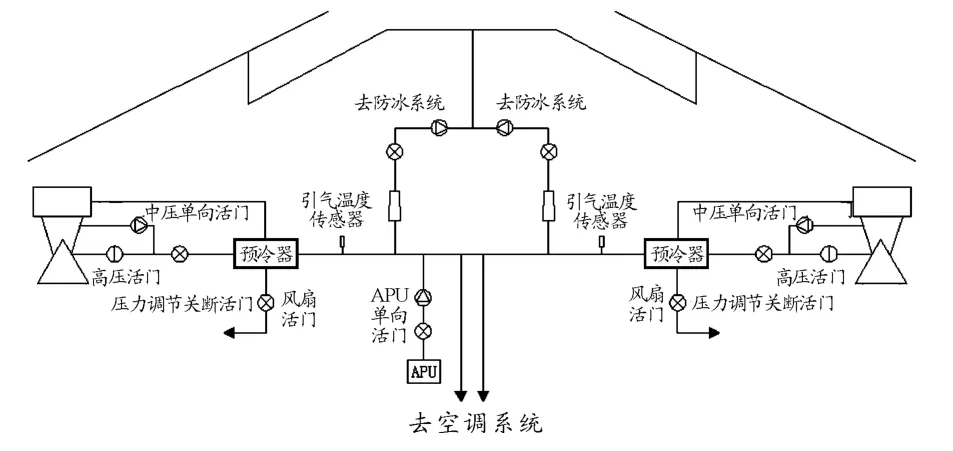
图1 ARJ21 引气系统原理
2 基于多源信息融合的模糊故障诊断数学模型
模糊故障诊断方法是依靠模糊集合论中的模糊关系矩阵和隶属函数来描述故障与征兆之间的模糊关系,从而实现对机械故障的诊断。
2.1 故障征兆向量
设发现的一组征兆样本为(y1,y2,…,ym),同时得到样本中各分量元素yi对征兆Yi的隶属度YiμYi(yi),于是故障征兆就可以用模糊向量表示为

2.2 故障原因向量
设某机械中所有可能发生的各种故障原因的集合为

式中n 为故障原因种类的总数。
由n 个故障原因所引起的各种征兆集合为

式中m 为故障征兆种类的总数。
当某类故障发生时,可能由n 种原因Xj(j =1,2,…,n)独立或同时起作用,记为故障原因向量。
与主谓句相比,非主谓句是有标记的形式,从语言交际的功能角度来说,名词性非主谓句是以称呼和指令为主,如医生对护士说“止血钳”,乘务员对乘客说“票”等。动词性非主谓句则是以指令(如“严禁吐痰”)和说明为主(如“出太阳了”等),形容词性非主谓句则是以感叹表情为主(如“好热啊!”“多美啊!”等)。本文不讨论指令类语体和感叹类语体的句法形式,主要分析主谓句的各个次类与叙事语体和描写语体的适应关系。
2.3 权重分析
确定权重是进行模糊故障诊断矩阵融合的重要部分,确定权重的常用方法主要有统计法、试探法和层次分析法。由于AHP 法具有简单和实用等特点,本文中,采用AHP 的方法来确定不同模糊故障诊断矩阵的权重。
层次分析法首先是由著名的美国运筹学家T.L.Saaty 教授提出的一种分析方法。这种分析方法的主要特点是它能够将结构特别复杂、关系模糊不清的问题转化为定量分析。它把1 ~9 比率标度法引入其中,如表1 所示。然后根据这些综合的判断,确定每一个因素相对于总目标的重要程度排列顺序。

表1 标度值的定义
2.3.1 权重计算
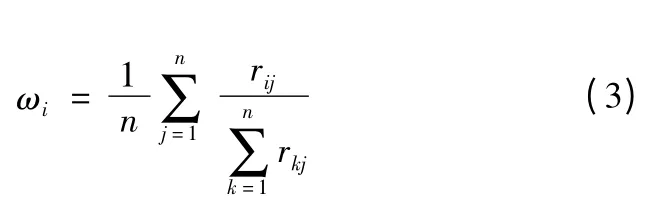
本论文采用和法进行权重计算。和法是将判断矩阵A的n 个列向量归一化后的行向量算术平均值,近似作为权重向量。
2.3.2 一致性检验
一致性检验的步骤如下:
1)计算一致性指标n=1,2,…,9,

其中λmax为判断矩阵的最大特征根。
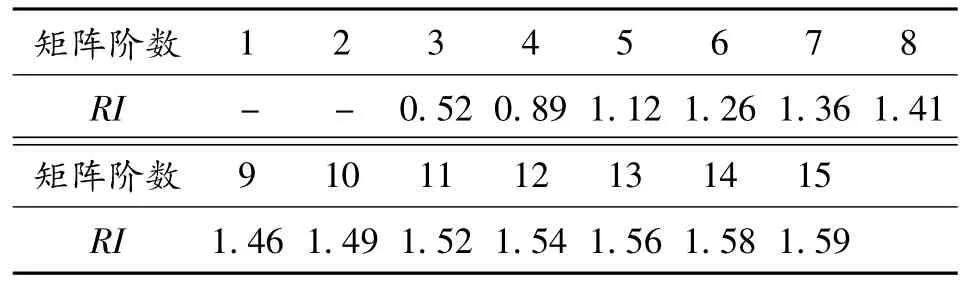
表2 平均随机一致性指标值
3)计算一致性比例CR

当CR <0.10 时,一般认为判断矩阵满足一致性要求。否则判断矩阵不满足一致性要求,需要调整判断矩阵,反复调整以后,最终使得CR <0.10,即直至具有满意的一致性为止。
2.4 模糊故障诊断模型
由于故障征兆界线的模糊性,因此可以通过建立隶属函数来表征各种征兆隶属于各种故障原因的程度。因为在故障征兆与原因之间存在因果关系。根据模糊推理合成原则,可得Y 与X 之间的模糊关系方程为

R 为模糊关系矩阵,它可表示为

其中矩阵R 的元素rij∈[0,1],i=1,2,…,n。
3 引气系统故障诊断实例
通过对使用困难报告、航空公司调研数据和维修人员经验汇编可得出民用飞机引气系统常见的故障现象有:X1预冷器控制活门卡滞或封严损伤;X2引气调节器施压活门磨损或失效;X3引气压力传感器故障;X4高压级调节器反流膜盒破损;X5高压级活门活塞环磨损;X6压力调节和关断活门磨损;X7450F°传感器失效;X8预冷器490F°超温电门故障;X9APU 单项活门磨损或打不开;X10第五级引气单项活门阀片衬套断裂。
常见的故障原因有:Y1引气压力低;Y2引气超温;Y3引气压力低、引气超温;Y4地面慢车时压力低;Y5地面慢车时引气压力低、引气超温、引气管道压力不稳定。
通过座谈会以及问卷调查,专家给出了B737NG 飞机引气系统重要部附件统计表,依据专家给出的B737NG 系统中故障率较高的部附件统计表,利用模糊统计法,可以逐个计算出矩阵元素rij,最后得到基于专家意见的B737NG 引气系统的模糊故障诊断矩阵如表3 所示。
同样方法,最后得到基于专家意见的A320 民用飞机引气系统的模糊故障诊断矩阵如表4 所示。
依据航空公司的调研数据,采用统计法可以建立引气系统的模糊故障诊断矩阵如表5 所示。
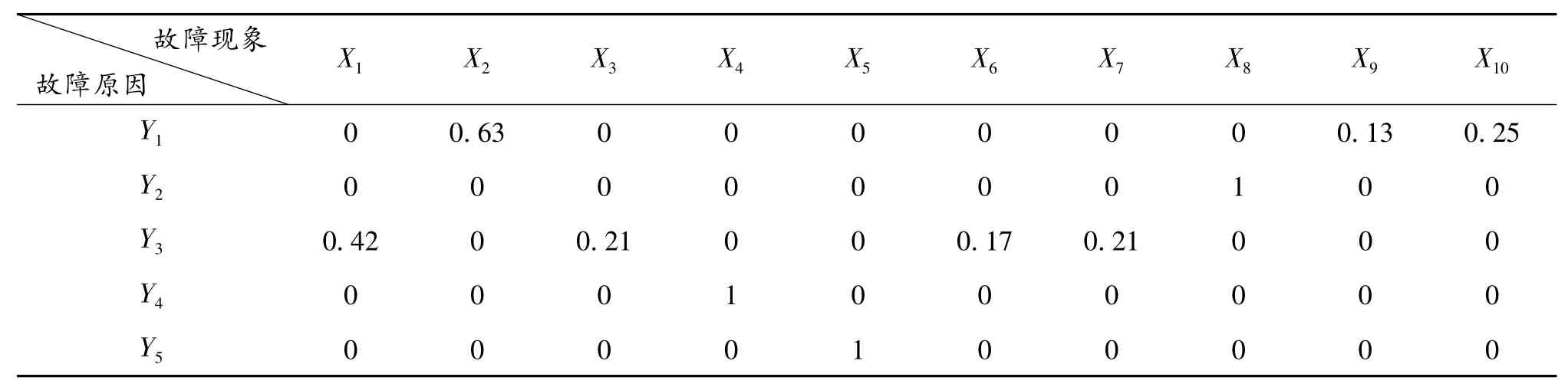
表3 基于专家意见的B737NG 民用飞机引气系统的模糊故障诊断矩阵

表4 基于专家意见的A320引气系统模糊故障诊断矩阵
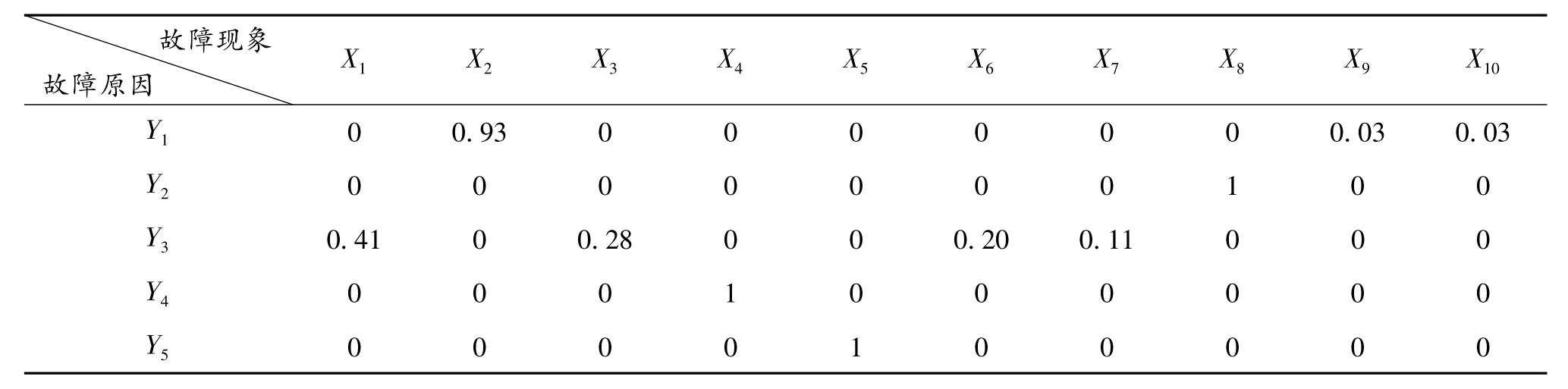
表5 基于故障率的B737引气系统引气系统模糊故障诊断矩阵
3.1 权重计算
分别设基于故障率的模糊故障诊断矩阵为因素B1,基于B737 专家意见模糊故障诊断矩阵为因素B2,基于A320 专家意见的模糊故障诊断矩阵为因素B3,其权重分别为ω1、ω2和ω3。
基于故障率的模糊故障诊断矩阵是统计了国航天津分公司从2005 年1 月1 日至2010 年5 月1 日全部飞机引气系统故障,数据详尽、可靠,故由此因素得出的模糊故障诊断矩阵很重要。基于专家意见的模糊故障诊断矩阵的建立是通过问卷调查及专家分析得出的数据,所以数据的可靠度次之,又因为A320 引气系统故障是故障发生几率不是很多的系统,统计数据可靠度最低,所以基于A320 专家意见的模糊故障诊断矩阵重要性最低。通过以上分析可以建立判断矩阵如表6 所示。
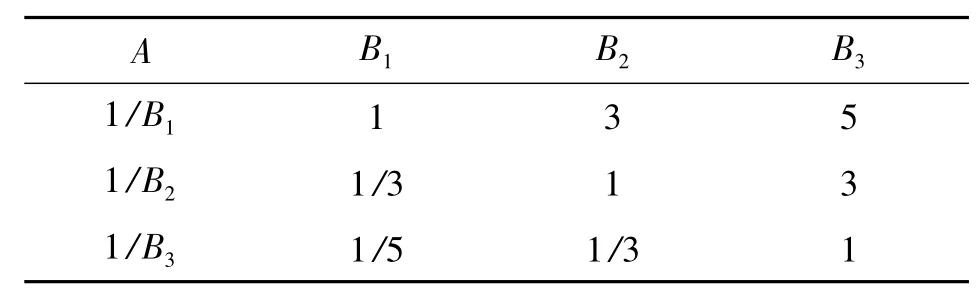
表6 基于因素B1、B2 和B3 的权重判断矩阵
按照和法解得ω1=0.63,ω2=0.26,ω3=0.11。
一致性检验:CR=0.0375 <0.10,满足一致性。
3.2 融合后的引气系统模糊故障诊断矩阵
按照上述思想,可得出融合后民用飞机引气系统模糊故障诊断矩阵如表7 所示。
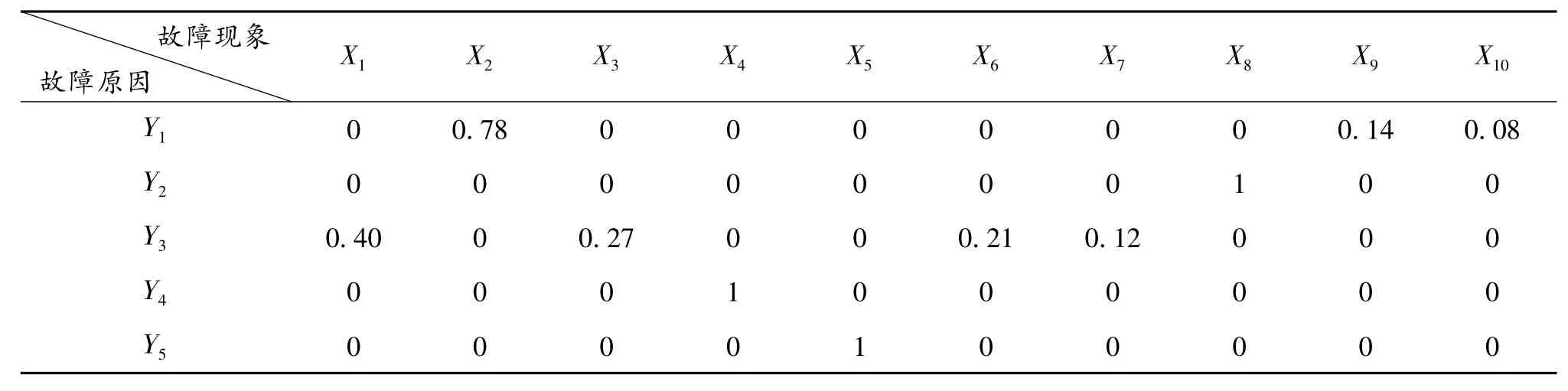
表7 基于多源信息融合的民用飞机引气系统模糊故障诊断矩阵
3.3 多因素模糊理论对民用飞机引气系统故障诊断及结果分析
当航空发动机出现引气压力低的征兆时,用1 表示征兆出现,用0 表示无征兆,得到征兆向量Y =(1,0,0,0,0)。根据模糊推理合成规则可得故障原因向量X=Y ◦R,解得故障原因向量X=(0,0.78,0,0,0,0,0,0,0.14,0.08)。根据最大隶属度原则,诊断结果为引气调节器施压活门磨损或失效。由于此诊断结果不仅仅依靠B737 专家意见的数据,还综合了B737 故障率和A320 的专家意见得出的,所以包含的数据充分,诊断更加真实可靠。
4 结束语
以民用飞机引气系统为例,利用多源信息融合及其模糊理论技术,建立了基于多源信息融合的模糊故障诊断的数学模型,对民用飞机引气系统进行了实例诊断,得出基于多源信息融合的模糊理论的故障诊断方法是一种比较可行的诊断方法,具有一定的理论和现实意义。
[1]李弼程,黄洁,高世海,等.信息融合技术及其应用[M].北京:国防工业出版社,2010.
[2]王仲生,赵鹏.基于多源信息融合的发动机转子早期故障识别[J].西北工业大学学报,2009(6):326-329.
[3]杨广,吴晓平,宋业新,等.基于粗糙集理论的多源信息融合故障诊断方法[J]. 系统工程与电子技术,2009(8):2013-2019.
[4]胡宝清. 模糊理论基础[M]. 武汉: 武汉大学出版社,2010.
[5]费成巍,艾延廷,白光忱.基于模糊熵的航空发动机整机振动故障诊断方法[J].振动与冲击,2010(6):7-9.
[6]瞿红春,刘杰,王太勇.一种基于信息熵的航空发动机性能评估方法[J]. 机械科学与技术,2009,28(6): 701-404.
[7]张义忠,冯振声,孟晨.模糊理论在导弹系统故障诊断中的应用[J].火力与指挥控制,2000(1):63-66.
[8]雍干.模糊理论在凝气器故障诊断中的应用[J].华东电力,2002(4):8-11.
[9]杨帆,吴迅,陈茂林,等.基于精馏塔多源信息融合的故障诊断方法[J]. 武汉理工大学学报,2012(11): 135-138.
[10]赵建辉,赵建平,孙永江,等.BP 神经网络在雷达故障诊断中的应用[J].兵工自动化,2013(2):37-39.
[11]程建兴,史仪凯.基于多传感器数据融合的飞机电源系统故障诊断[J].火力与指挥控制,2012(8):184-187.
