空载时锯床带锯条振动的建模与仿真
2014-07-01彭文菁马飞
彭文菁马飞
(1.武汉铁路职业技术学院,湖北武汉 430000;2.武汉理工大学,湖北武汉 430000)
空载时锯床带锯条振动的建模与仿真
彭文菁1马飞2
(1.武汉铁路职业技术学院,湖北武汉 430000;2.武汉理工大学,湖北武汉 430000)
本文对锯床空载时带锯条振动的原因进行了分析,主要针对锯轮偏心力及焊缝与锯卡的冲击力对锯条振动的影响进行研究,并对其建立数学模型,利用Matlab仿真。
振动;锯轮偏心力;锯卡;数学模型;仿真
1 引言
锯床性能的好坏主要体现在锯条的切削效果上,而锯条的切削效果直接由其振动的强弱决定。经分析,我们得知锯床空载时锯条的强迫振动来源,一是锯床主动轮质量偏心;二是锯条焊缝与锯卡碰撞产生的冲击力。本文仅对空载时锯条振动情况进行研究,并对此建立数学模型,利用Matlab进行仿真,以探讨空载时锯轮偏心力及焊缝与锯卡的碰撞对锯条振动的影响。
2 建模与仿真
锯条在某非零初始状态下不受外力的振动称为自由振动,锯条的自由振动与其本身特性及其初始状态有关。锯条在外力作用下的振动称为强迫振动。锯床空载时强迫锯条振动的外力有来自主动轮偏心的周期力和锯卡(转向器)处的冲击力。为简化模型,我们将针对起振原因逐一建模,由于力的作用效果可以叠加,锯条的振动也可以叠加,所以最后将两种模型组合起来即为锯条在综合力下的振动情况。而锯条实际中的振动为其自由振动与强迫振动的叠加。
2.1 各强迫力单独作用的仿真
由于锯条振动的模型属于变参数的双曲线型,Matlab仿真软件中目前没有现有的函数和工具箱求解。本文通过编程求解上述偏微分方程。
2.1.1 锯卡(转向器)处作用力引起的振动仿真
带锯条与锯卡间的距离较小时,由于焊缝的厚度不均匀和表面不平,在运转中焊缝会冲击锯卡,并引起带锯条张紧力瞬间变化。由于锯轮做周期性转动,所以焊缝也以一定的周期冲击锯卡。焊缝与上锯卡冲击时使锯条张紧力升高,取此部分力为正值;焊缝与下锯条冲击时使锯条张紧力降低,取此部分力为负值;焊缝与锯卡的冲击力由这两部分组成。焊缝与上下锯卡冲击时产生的脉冲力可表示为:
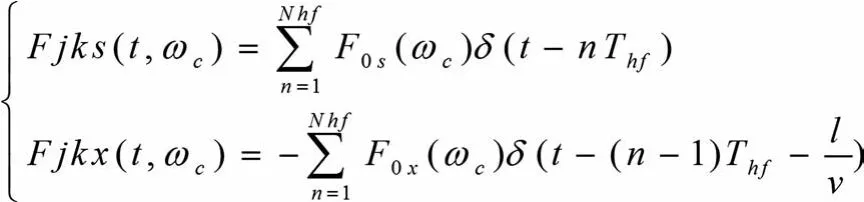
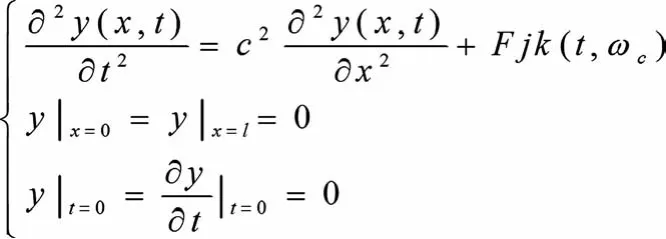
锯卡与焊缝的作用力为Fjk(t,ωc)=Fjks(t,ωc)+Fjkx(t,ωc)。其中F0(ωc)为焊缝与锯卡冲击力的大小,它与焊缝修整情况、锯卡构造及带锯条与锯卡间隙有关,是回转速度2ωc的函数;Thf为焊缝出现周期,Thf=L/(2ωcr);L为锯条全长,l为锯卡间锯条长,r为锯轮半径;Nhf为焊缝出现次数;v为锯条速度。由于锯条具有一定刚度,且考虑到模型的简化,将其振动时锯卡处看成固定的两端,不考虑锯条X轴方向的振动。由此可将锯条在锯卡冲击力作用下的振动近似成两端固定且张紧的弦,在两端受简谐干扰力作用的强迫振动模型。其振动方程如下:
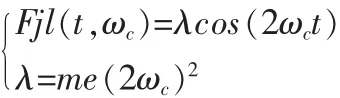
2.1.2 主动轮偏心引起的振动仿真
3 结果分析
(1)以时间为横轴,位移为纵轴,不同的曲线代表锯条上不同位置点随时间的振动情况;以锯条位置为横轴,振动位移为纵轴,不同曲线代表锯条在不同时刻的振动情况;以下类同。初始条件不同,锯条自由振动情况不同。
(2)相同张紧力不同转速下锯条分别受主锯轮偏心和焊缝与锯卡冲击产生的振动。整体趋势上锯条振动的幅度随着转速的增加而增大,要减小振动,需限制转速;而工作效率上要求锯床切割速度越快越好。所以在锯床切割过程中,应结合锯条振动情况选择合适的锯轮转速。
(3)为简化模型,仿真时假设锯条张紧力T恒定不变,但实际情况下T是变化的。T的大小直接影响锯条的松弛程度,进而影响锯条的振幅。分别比较可看出,随着T的增大,锯条振幅减小,振动减弱;但同时锯条刚性也越大,弹性越小,在切割中锯条受负载作用力极易超出其最大承受力而断裂,缩短了锯条使用寿命;若张紧力过小,锯条振动加剧,甚至会出现锯条与锯轮打滑,产生跑据现象。所以应在保证锯条使用寿命的前提下尽可能的增大锯条的张紧力。
参考资料:
[1]欧珠光.工程振动[M].武汉大学出版社.
[2]王伟,赖永星,苗同臣,李静斌.振动力学与工程应用[M].郑州大学出版社.
[3]仁兴民,秦卫阳,文立华.工程振动基础[M].机械工业出版社.
[4]王定江.应用偏微分方程[M].浙江大学出版社.
TG561
A
1003-5168(2014)04-0133-01
彭文菁(1981—),女,汉族,湖北省武汉市人,讲师,硕士,研究方向:智能控制与模式识别。
