履带张紧力及其影响因素分析
2014-06-27黄雪涛顾亮吕唯唯杨聪彬高晓东朱兴高
黄雪涛,顾亮,吕唯唯,杨聪彬,高晓东,朱兴高
(1.北京理工大学机械与车辆学院,北京 100081;2.山东交通学院汽车工程学院,山东济南 250023)
履带张紧力及其影响因素分析
黄雪涛1,2,顾亮1,吕唯唯1,杨聪彬1,高晓东1,朱兴高1
(1.北京理工大学机械与车辆学院,北京 100081;2.山东交通学院汽车工程学院,山东济南 250023)
针对复杂的履带张紧力问题,研究张紧力在履带环上的分布情况,建立了履带张紧力的理论估算公式。利用履带车辆的多体动力学模型,对静平衡及匀速运动工况下履带张紧力的变化情况进行理论估算和动力学仿真,验证了理论估算公式的合理性。分析履带张紧力的影响因素,并利用理论估算和动力学仿真相结合的方法探讨预张紧力、车辆行驶速度、主动轮驱动力矩3种因素对履带张紧力的影响规律,为履带车辆的设计开发提供了理论参考依据。
兵器科学与技术;履带张紧力;理论模型;预张紧力;动力学仿真
0 引言
履带作为履带车辆的专用部件,在提高车辆的越野通过性方面发挥着重要作用。履带是由多块履带板连接而成的多体机构,相邻履带板之间的相互作用力称为履带张紧力。履带张紧力及其影响因素研究,能够为履带车辆的设计开发提供理论依据,具有重要的理论指导和工程实践意义。但是,履带张紧力变化情况复杂,影响因素多,理论建模及分析的难度大,因此一直是履带车辆研究领域的一个热点和难点。
美国密歇根州立大学的Ma等[1]建立了非线性履带数学模型;密歇根理工大学的Sandu等[2]研究了弹性履带连续算法;陆军坦克车辆研究中心的Jayakumar等[3]建立了履带的动力学模型,研究了履带张紧力的动力学仿真方法;韩国汉阳大学的Huh等[4-6]研究了履带张紧力的测试方法;船舶及海洋工程研究所的Yeu等[7]研究了履带张紧力的控制技术;西班牙塞维利亚大学的Galvin等[8]建立了地面-履带的边界元模型,研究了履带张紧力对地面-履带耦合关系的影响;捷克国防大学的Chalupa等[9]研究了履带张紧力数学建模技术;北京理工大学的张振华等[10]研究了悬挂系统对履带张紧力的影响。前人的研究工作主要集中在履带的简化模型及履带张紧力的动力学仿真和控制技术上,对履带张紧力的理论建模及影响因素研究的较少,本文结合履带环的几何参数,研究了履带张紧力在履带环上的分布规律,建立了履带张紧力的理论估算公式,并利用理论推导与动力学仿真相结合的方法研究了履带张紧力的影响因素,为履带的优化升级奠定基础。
1 履带张紧力的理论估算模型
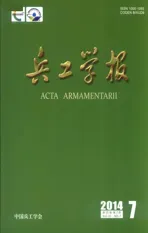
履带车辆匀速行驶时,履带环上各段受到的履带张紧力有明显差别。根据履带环上张紧力的变化情况,履带张紧力可以分九部分:诱导轮附近、履带上支段、主动轮附近、第1~6负重轮附近,如图1所示。
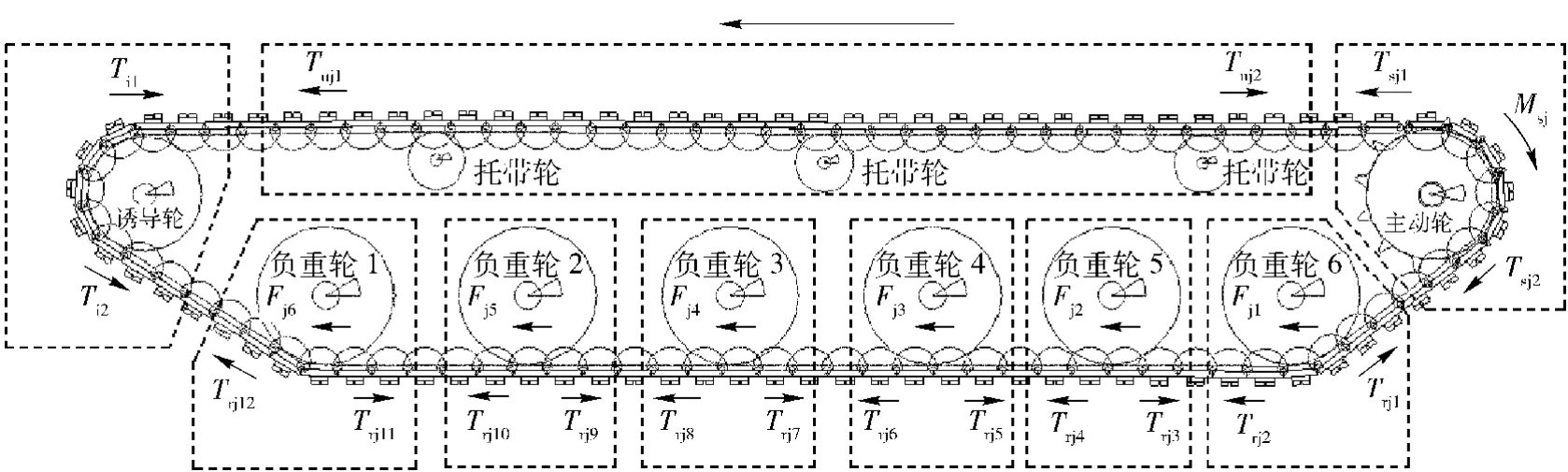
图1 履带环各部分受力分布Fig.1 The distribution of track tension on track link
诱导轮安装在履带张紧机构上,用来支撑上支履带和改变上支履带的运动方向,并通过它来调整履带的松紧程度。分别取诱导轮、诱导轮曲臂为隔离体,得到诱导轮、诱导轮曲臂的几何结构及受力情况如图2、图3所示。
图2、图3中,Ti1、Ti2表示诱导轮附近的履带张紧力;mi表示诱导轮质量,ri表示诱导轮半径,ρ表示履带单位长度质量;Fp表示驱动力产生的张紧力分量;Fi表示曲臂作用于诱导轮上的力;Ftnxt是履带转动时产生的离心力;Msj表示主动轮的驱动力矩;rs表示主动轮半径;Fr为履带张紧装置产生的预张紧力。结合诱导轮及诱导轮曲臂隔离体的动力学平衡方程,可以得出诱导轮附近的履带张紧力:

式中:l为履带长度;lfr为履带松边长度;lw为履带紧边长度。
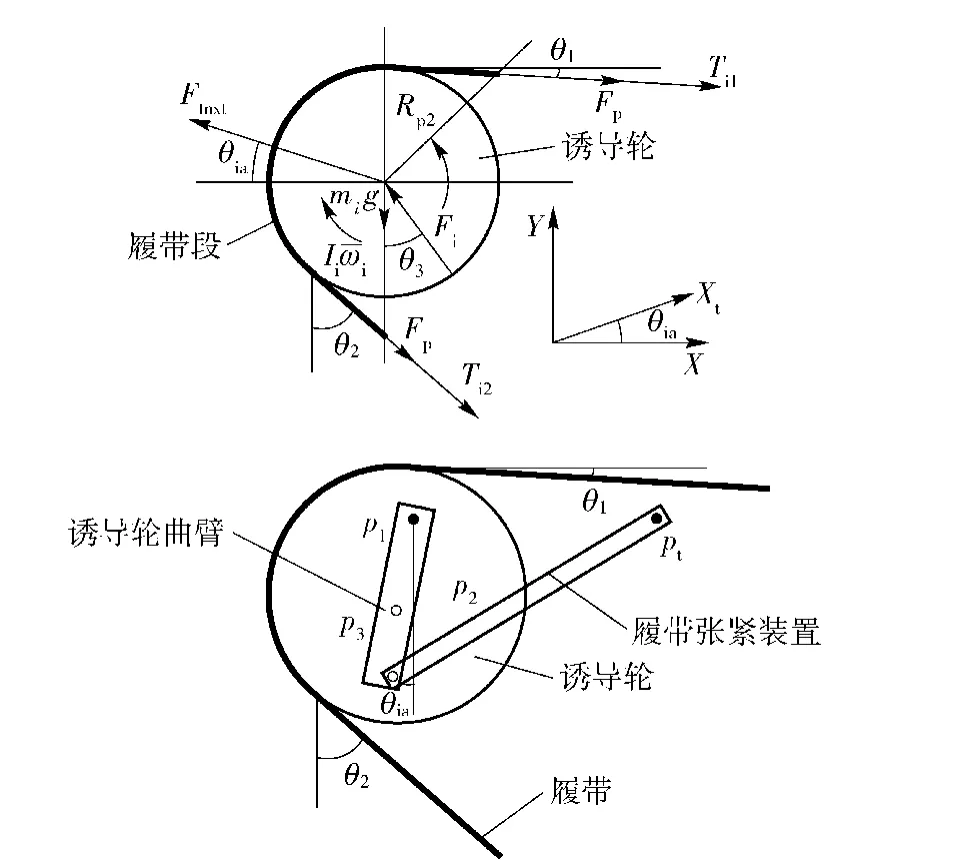
图2 诱导轮隔离体几何结构及受力分析图Fig.2 Free body diagram and geometry of idler

图3 诱导轮曲臂隔离体几何及受力分析图Fig.3 Free body diagram and geometry of idler arm
上支履带段位于履带环上部,对于后驱的履带车辆而言,它属于松边。取上支段的履带为隔离体,得到上支履带的受力如图4所示。
图4 上支履带段隔离体受力分析图Fig.4 Free body diagram and geometry of upper track
图4中:Tuj1、Tuj2为上支履带两端的张紧力;θ1、θ3表示上支履带左、右端的水平夹角,二者的值较小且认为二者相等。由于履带张紧力较大,上支部分保持水平状态,则上支履带段的力平衡方程可以表示为

主动轮是履带车辆行走机构的驱动装置。取主动轮为隔离体,得到主动轮的受力如图5所示。其中,Tsj1、Tsj2表示主动轮两端的履带张紧力。则主动轮附近的履带张紧力满足动力学方程:

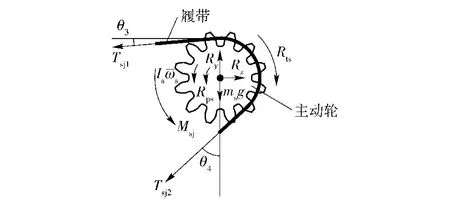
图5 主动轮隔离体受力分析图Fig.5 Free body diagram of drive sprocket
负重轮的作用主要是保证车体在履带上滚动并将车的重量分配在支撑面全长上。取各负重轮为隔离体,得到负重轮受力如图6所示。
舒马赫借用甘地的观点,即,不能靠大量生产来帮助世界上的穷人,得靠大众生产才能帮助他们,来说明传统产业动用了大众资源这种无价资源,符合生态法则,具有良好发展前景的观点,并且进一步认为“恢复简单明了比沿着越来越精密和复杂的方向发展难得多”[4].我国正处在从要素积累的经济增长模式向集约型的经济增长模式过渡,依据发达国家的发展历程,这一时期一国产业和经济领跑部门主要是钢铁、电气、石油、汽车、民用消费及服务业等传统产业[5].我国经济发达地区传统产业的发展与国家的经济政策密切相关.一些经济政策对于工业集聚具有直接的影响,一项政策一旦实施,即有自己的自增强作用[6].
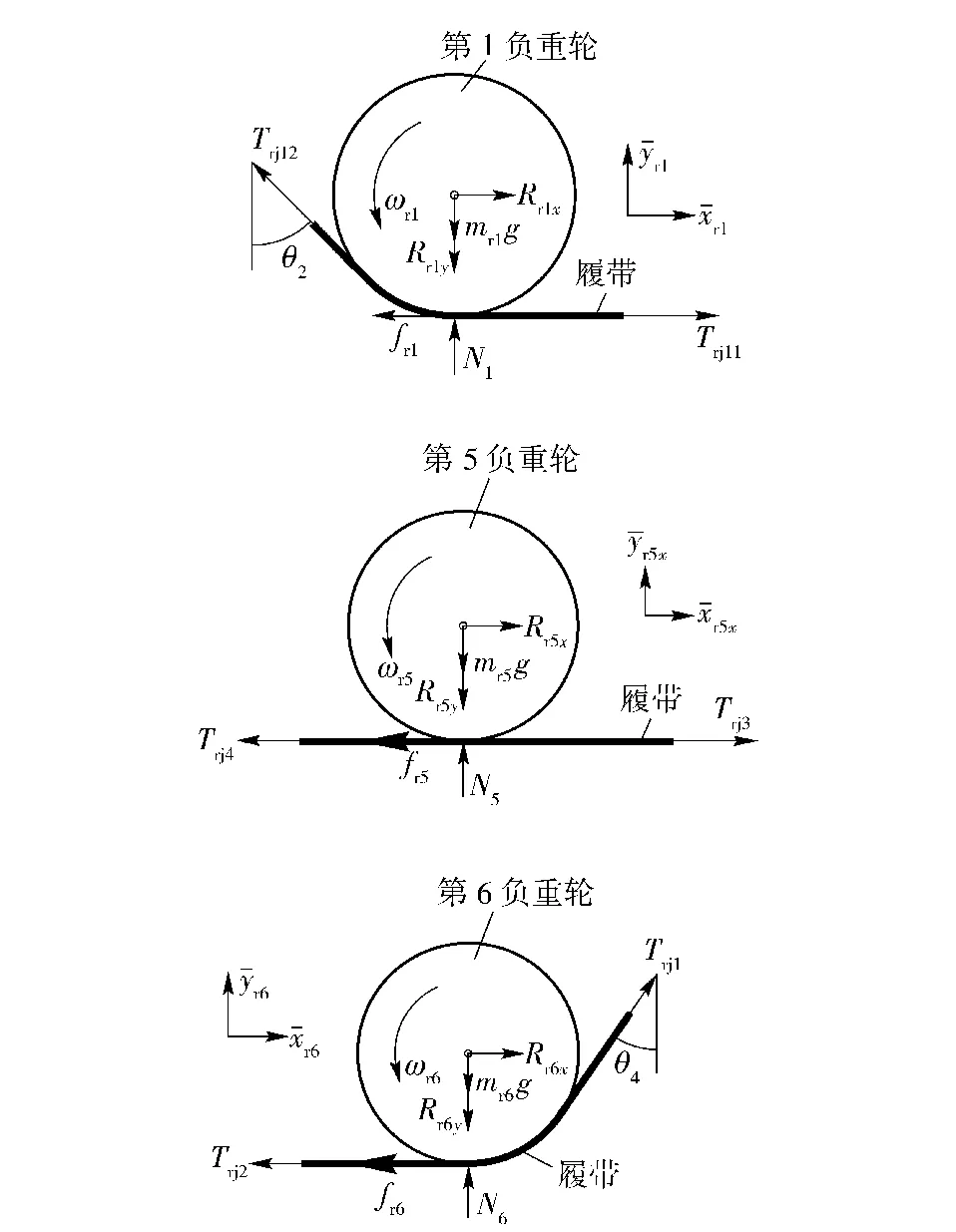
图6 负重轮隔离体受力分析图Fig.6 Free body diagram of road wheel
图6中:Trj为负重轮附近的履带张紧力;Rrjx、Rrjy表示平衡肘作用于负重轮的作用力;u为履带、负重轮之间摩擦系数;mr表示负重轮质量;r表示负重轮半径;ωr表示负重轮滚动角速度;i= 2,3,4,5.则负重轮之间的履带张紧力满足动力学方程:

以履带松边与紧边的临界点为起点,顺时针方向为正方向,建立履带张紧力与履带位置关系的估算公式:

2 履带张紧力理论估算公式的仿真验证
根据履带车辆的具体结构参数,利用ADAMS软件的ATV模块建立的履带车辆仿真模型如图7所示。借助于动力学模型对静平衡(车辆处于静止状态)和匀速运动工况下履带张紧力的变化情况进行仿真分析,通过仿真结果与理论估算结果的对比分析来检验理论估算公式的适用性。
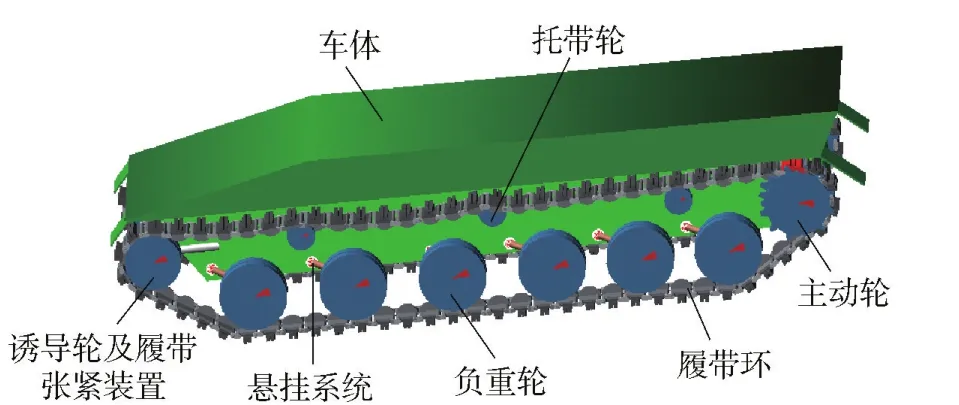
图7 履带车辆仿真模型Fig.7 The simulation model of tracked vehicle
对静平衡工况下的履带张紧力进行仿真分析,并以履带松边与紧边的临界点为起点,顺时针方向为正方向,履带板与起点的周向长度为横坐标,以履带张紧力为纵坐标,得到静平衡状态下履带张紧力的理论估算与仿真结果对比关系如图8所示。
在匀速运动工况下对履带张紧力进行仿真分析,假设履带的预张紧力为30 kN,车辆的行驶速度为10 km/h,车辆的行驶路面为平坦硬路面,则履带张紧力随行驶路程的变化曲线如图9所示。在对履带车辆匀速运动工况仿真分析过程中,由于考虑了履带板的板块结构、履带与主动轮的啮合及履带车辆的横向、纵向运动引起的动载荷,故履带张紧力的变化过程为随机过程,履带张紧力的变化规律可以通过对仿真结果的统计分析来实现。对匀速运动工况下履带张紧力的仿真数据进行统计分析,得到幅值的统计数据如表1所示。
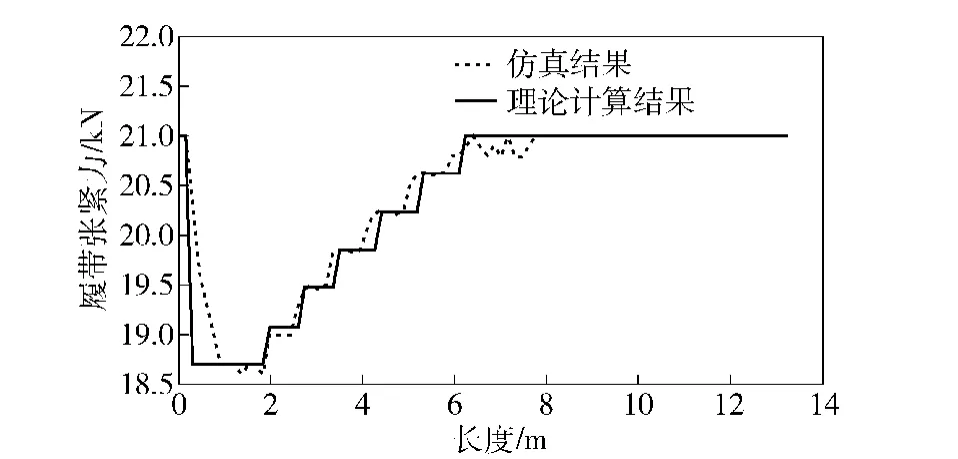
图8 静平衡时理论估算与仿真结果对比Fig.8 The theoretical and simulation results in static balance

表1 匀速行驶工况下履带张紧力的统计数据Tab.1 The statistical data of track tension at steady speed
匀速状态下履带张紧力的理论估算与仿真结果的对比关系如图10所示。
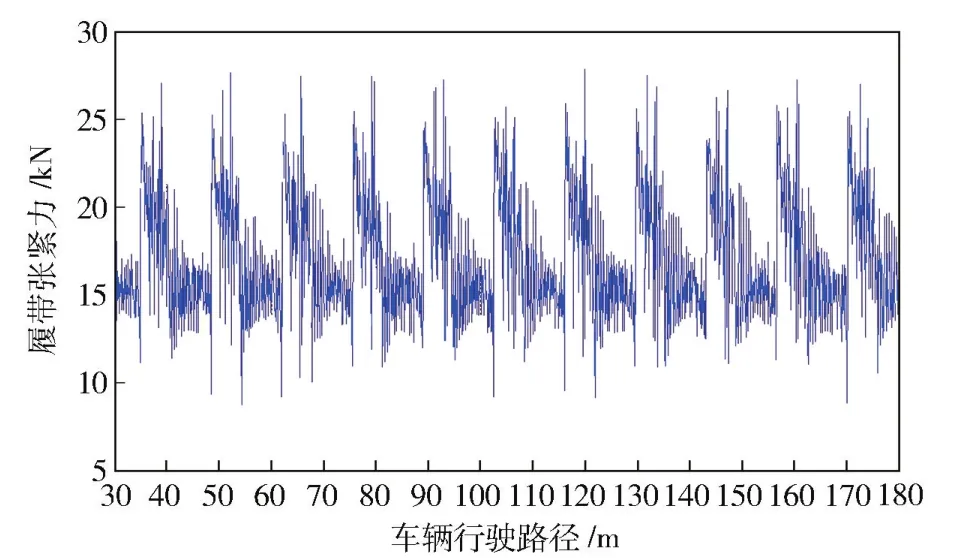
图9 匀速运动工况下履带张紧力的仿真结果Fig.9 The simulation results of track tension
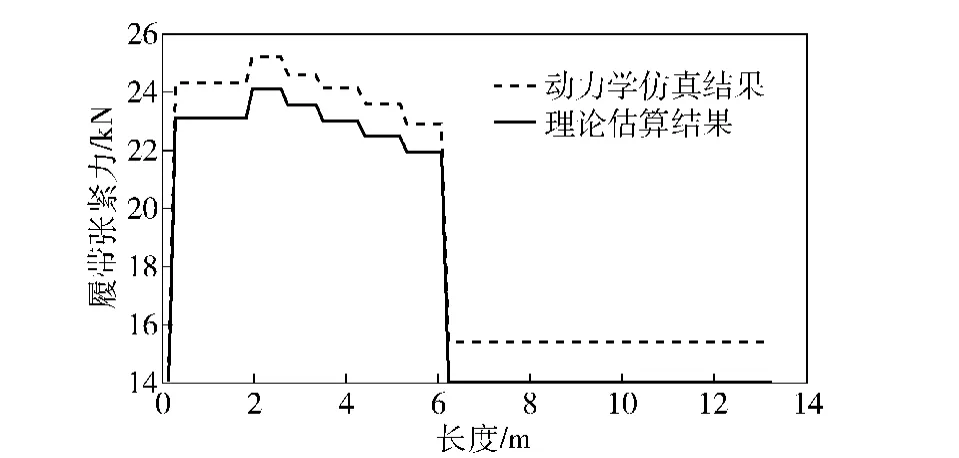
图10 履带张紧力的理论估算与仿真结果对比Fig.10 The theoretical and simulation results of track tension
由上面的分析可知,履带张紧力理论估算与仿真结果的变化趋势一致。由于履带张紧力理论估算公式是在忽略履带板块结构、履带与主动轮的啮合及履带车辆的横向、纵向振动引起动载荷的假设下得到的,而在仿真分析的过程中则综合考虑了这些因素,故仿真结果较理论估算结果稍大,但误差在10%范围内。
3 履带张紧力影响因素分析
履带张紧力的影响因素包括预张紧力、车辆行驶速度及主动轮驱动力矩,下面采用理论估算与动力学仿真相结合的方法就各因素对履带张紧力的影响规律分别进行讨论。
假设履带车辆的行驶速度不变,主动轮的驱动力矩不变,履带车辆的相关参数按照动力学模型参数设定。则得到不同预张紧力下履带张紧力的变化曲线如图11所示。
对不同预张紧力作用下的履带张紧力仿真数据进行统计分析,并结合履带张紧力的理论估算结果,得到履带张紧力随预张紧力的变化曲线如图12所示。

图11 履带张紧力随预张紧力的变化情况Fig.11 Track tension as a function of pre-tension
由上面的分析可知,履带各部分的张紧力都随着预张紧力的增加而增大,且二者之间存在着线性关系。仿真结果较理论估算结果略高,但误差在20%的范围内。
3.2 履带张紧力随车辆行驶速度的变化规律
假设履带车辆的预张紧力不变,主动轮驱动力矩不变,则得到不同行驶速度下履带张紧力的变化曲线如图13所示。
对不同车辆行驶速度下的履带张紧力仿真数据进行统计分析,并结合履带张紧力的理论估算结果,得出履带张紧力随车辆行驶速度的变化曲线如图14所示。
由上面的分析可知,履带各部分的张紧力都随着车辆行驶速度的增加而增加,且张紧力增大值与速度平方呈正比;仿真结果较理论估算结果略高,但误差在13%的范围内。
3.3 履带张紧力随主动轮驱动力矩的变化规律
为了研究履带张紧力随主动轮驱动力矩的变化情况,假设车辆的行驶速度和预张紧力不变,通过改变地面地貌来得到不同的驱动力矩。不同地面地貌下主动轮驱动力矩的变化曲线如图15所示。对不同地面地貌下主动轮驱动力矩的仿真数据进行统计分析,得到幅值的统计数据如表2所示。
不同地面地貌下履带张紧力的变化情况如图16所示。对不同地面地貌下的履带张紧力仿真数据进行统计分析,并结合履带张紧力的理论估算结果,可以得出履带张紧力随驱动力矩的变化曲线如图17所示。

图12 履带张紧力随预张紧力的变化曲线Fig.12 Track tension as a function of pre-tension
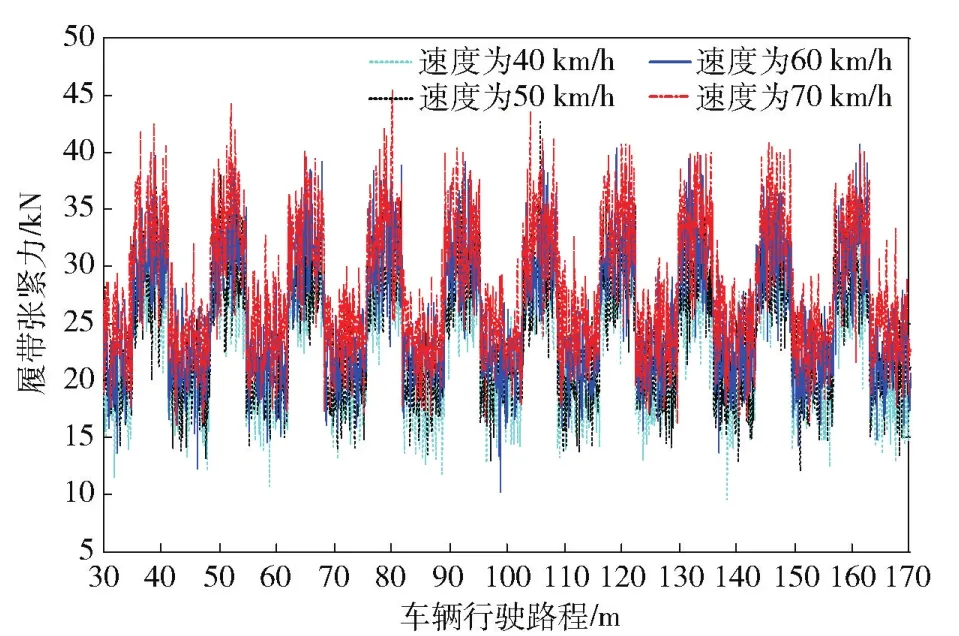
图13 履带张紧力随车辆行驶速度的变化情况Fig.13 The change of track tension with speed
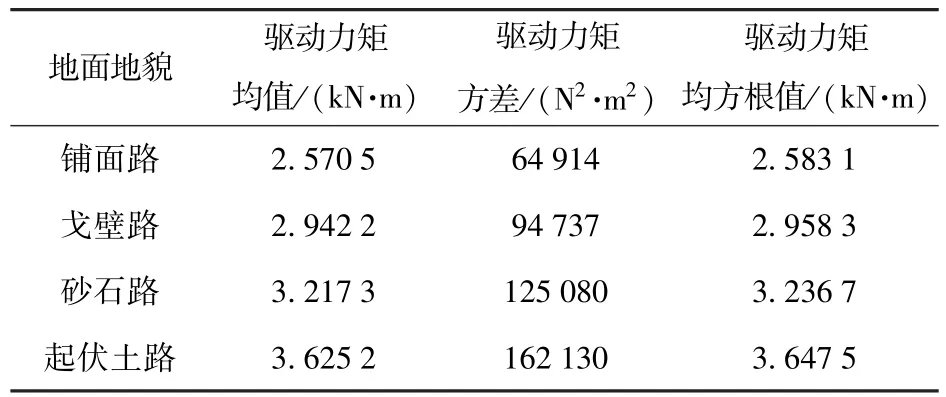
表2 不同地面地貌下主动轮驱动力矩的统计数据Tab.2 The statistical data of driving moment of drive sprocket in different landforms

图14 履带张紧力随行驶速度的变化曲线Fig.14 The change of track tension with speed

图15 不同地面地貌下主动轮驱动力矩变化情况Fig.15 The driving moment of drive sprocket in different landforms
图16 不同地面地貌下履带张紧力的变化情况Fig.16 The track tensions in different landforms
图17 履带张紧力随主动轮驱动力矩的变化曲线Fig.17 The change of track tension with driving moment of drive sprocket
由上面的分析可知,履带车辆以同一速度、同一预张紧力行驶在不同地貌的路面上时,主动轮驱动力矩不同。理论估算和仿真结果表明,履带紧边及6个负重轮之间的张紧力随驱动力矩的增加而增大,而履带松边的张紧力随驱动力矩的增加而减小;仿真结果较理论估算结果略高,误差在20%的范围内。
4 结论
1)建立了履带张紧力的理论估算模型。研究了履带张紧力在履带环上的分布情况,推导了履带各部分的张紧力估算公式,建立了履带张紧力的理论估算模型。
2)用仿真分析的方法检验了理论估算公式的适用性。根据履带车辆的动力学模型,对履带车辆静止和匀速行驶工况进行了履带张紧力的理论估算和动力学仿真;仿真结果与理论估算结果的误差在20%的范围内,验证了履带张紧力理论估算公式的合理性。
3)分析了预张紧力、车辆行驶速度及主动轮驱动力矩对履带张紧力的影响。利用理论估算和动力学仿真相结合的方法研究了三因素对履带张紧力的影响,得出了履带张紧力随三因素变化的规律,即履带各部分的张紧力与预张紧力的大小呈线性关系;与速度的平方呈线性关系;而履带松边的张紧力随驱动力矩的增大而减小,其余各部分的履带张紧力与驱动力矩正相关。
References)
[1] Ma Z D,Perkins N C.A track-wheel-terrain interaction model for dynamic simulation of tracked vehicles[J].Vehicle System Dynamics,2002,37:401-421.
[2] Sandu C,Freeman J S.Connectivity algorithm for an extended rubber-band track model[J].Heavy Vehicle Systems-International Journal of Vehicle Design,2002,9:333-353,
[3] Jayakumar P,Contreras U,Letherwood M D.New finite element/ multibody system algorithm for modeling flexible tracked vehicles [R].US:Army Tank-Automotive Research and Development Command,2011:8.
[4] Huh K,Cho B H,Choi J H.Development of a track tension monitoring system in tracked vehicles on flat ground[J].Proceedings of the Institution of Mechanical Engineers Part D-Journal of Automobile Engineering,2001,215:567-578,.
[5] Huh K,Kim J,Hong D,et al.Estimation of dynamic track tension utilizing a simplified tracked vehicle model[C]∥Proceedings of the 2001 American Control Conference.US:IEEE,2001:3335-3340.
[6] Huh K,Hong D G.Track tension estimation in tracked vehicles under various maneuvering tasks[J].Journal of Dynamic Systems Measurement and Control-Transactions of the ASME,2001,123: 179-185.
[7] Yeu T K,Hong S,Kim H W,et al.Path tracking control of tracked vehicle on soft cohesive soil[C]∥6th 2005 ISOPE Ocean Mining Symposium,2005.Changsha,Hunan,China:ISOPE, 2005:168-174.
[8] Galvin P,Romero A,Dominguez J.Fully three-dimensional analysis of high-speed traintracksoil-structure dynamic interaction[J]. Journal of Sound and Vibration,2010,329:5147-5163.
[9] Chalupa M,Severa L,Vlach R.Vehicle track loading simulation [C]∥4th International Conference on Machine Vision:Computer Vision and Image Analysis;Pattern Recognition and Basic Technologies.Singapore:International Association of Computer Science and Information Technology,2012.
[10] 张振华,董明明.悬挂特性参数对履带车辆随机路面越野平顺性能影响[J].北京理工大学学报,2008,28(6):491-495.
ZHANG Zhen-hua,DONG Ming-ming.Influence of suspension parameters on thecross-country comfort performance of tracked vehicles[J].Transactions of Beijing Institute of Technology,2008, 28(6):491-495.(in Chinese)
Track Tension and Its Influencing Factors
HUANG Xue-tao1,2,GU Liang1,LYU Wei-wei1,YANG Cong-bin1,GAO Xiao-dong1,ZHU Xing-gao1
(1.School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China; 2.School of Automotive Engineering,Shangdong Jiaotong University,Jinan 250023,Shandong,China)
The distribution of track tension on track link is studied for the complex track tension problem,and the theoretical estimation formula of track tension is established.The theoretical estimation and dynamic simulation of track tension in static balance and uniform speed conditions are conducted by using the multi-body dynamic model of tracked vehicle,and the rationality of theoretical estimation formula is verified.The influencing factors of track tension are also analyzed,and the influence of each factor on track tension is discussed using the method of combining theory calculation and dynamic simulation.The results provide a theoretical basis for the design of tracked vehicles.
ordnance science and technology;track tension;theoretical model;pre-tension;dynamic simulation
TH122
A
1000-1093(2014)07-1110-09
10.3969/j.issn.1000-1093.2014.07.027
2013-07-22
国家自然科学基金项目(1030020220707)
黄雪涛(1978—),男,博士研究生。E-mail:xuetaohuang@163.com;
顾亮(1958—),男,教授,博士生导师。E-mail:guliang@bit.edu.cn