面阵列凸点按需喷射打印平台控制
2014-06-24高胜东刘荣辉姚英学
高胜东,刘荣辉,姚英学
(哈尔滨工业大学机电工程学院,150001哈尔滨)
面阵列凸点按需喷射打印平台控制
高胜东,刘荣辉,姚英学
(哈尔滨工业大学机电工程学院,150001哈尔滨)
为实现面阵列电子封装互联钎料凸点的按需式喷射打印,建立一套钎料金属微熔滴按需喷射打印沉积三轴运动平台,并在PC+运动控制卡的基础上,利用LabVIEW开发了一套微滴喷射打印平台多轴运动控制系统.控制系统可根据互联凸点的坐标数据信息,利用蚁群算法对钎料凸点喷射打印过程中平台的运动路径进行优化,能有效地提高喷射打印效率,实现了凸点打印平台的运动控制.用激光干涉仪对平台运动过程中的定位精度及重复定位精度的测量结果表明,平台的运动满足球栅阵列(BGA)封装凸点打印的精度要求.
封装;钎料凸点;按需喷射;多轴运动控制;路径规划;蚁群算法
球栅阵列(BGA)封装、芯片尺寸封装(CSP)等面阵列形式的集成电路微电子封装的I/O引脚以圆形或柱状焊点按阵列形式分布在封装下面,大量应用在信息家电、无线网络、手机芯片等新型产品中[1-2].已开发的钎料凸点制作技术主要有金属模蒸发沉积技术、模板印刷方法和钎料球植球-重熔法等,目前商用的基于BGA芯片的精密激光植球设备的定位精度为±30 μm[3].
均匀微熔滴沉积制造是一种新型的快速成型技术[4-5],其主要原理是用振动迫使熔融材料以微滴的形式由喷嘴喷出后,通过精确控制沉积平台的运动,与微滴的喷射过程互相配合来控制微滴沉积位置、微滴飞行距离等参数,沉积形成所需图案及结构,此技术可应用于面阵列微电子封装互联凸点印刷以及喷射打印电路等领域.
针对微电子封装的技术要求,国内外研究者开发了不同的互联凸点制作装置,华中科技大学利用喷墨打印机控制技术建立了一套压电式喷射三维打印系统[6-7];吉林大学利用运动控制卡和直线电机建立了压电驱动喷射点胶的运动系统[8],具有较高的运动精度;上海交通大学采用运动误差补偿技术,建立了基于Visual C++平台的BGA激光植球系统[3].但目前尚没有针对面阵列封装钎料凸点分布信息而进行灵活打印的运动控制系统.
本文在已建立的基于LabVIEW的按需式喷射打印信号驱动系统及喷射过程图像采集及处理系统的基础上,建立了一个多轴运动平台及其控制系统,可以实现打印平台运动的精确控制,并且根据互联凸点的坐标数据对运动路径进行规划,满足在单喷嘴的条件下进行灵活喷射与快速精确沉积打印的需求.由于已开发的微滴喷射波形驱动系统与图像处理系统都是基于LabVIEW进行设计,本文中沉积平台的运动控制系统采用LabVIEW开发工具配合运动控制卡进行平台的运动设计.
1 系统总体结构设计
微滴喷射打印系统的总体结构如图1所示,主要由3部分组成:驱动波形发生系统、运动控制系统、图像采集及处理系统.在喷射打印之前需对液滴喷射参数进行确定,实现按需喷射;在喷射的过程中,实时地获取喷射出来的液滴的图像进行处理,获得液滴喷射的速度、液滴的圆度等重要参数,将分析结果反馈到驱动波形控制程序中,以便驱动程序对驱动波形参数进行调整.根据喷射打印沉积的数据,运动控制系统需要与微滴喷射驱动信号配合,当运动到凸点沉积位置时,喷射驱动系统发出一个波形信号驱动按需式微熔滴发生器喷射出一个微熔滴,沉积后实现喷射打印过程.
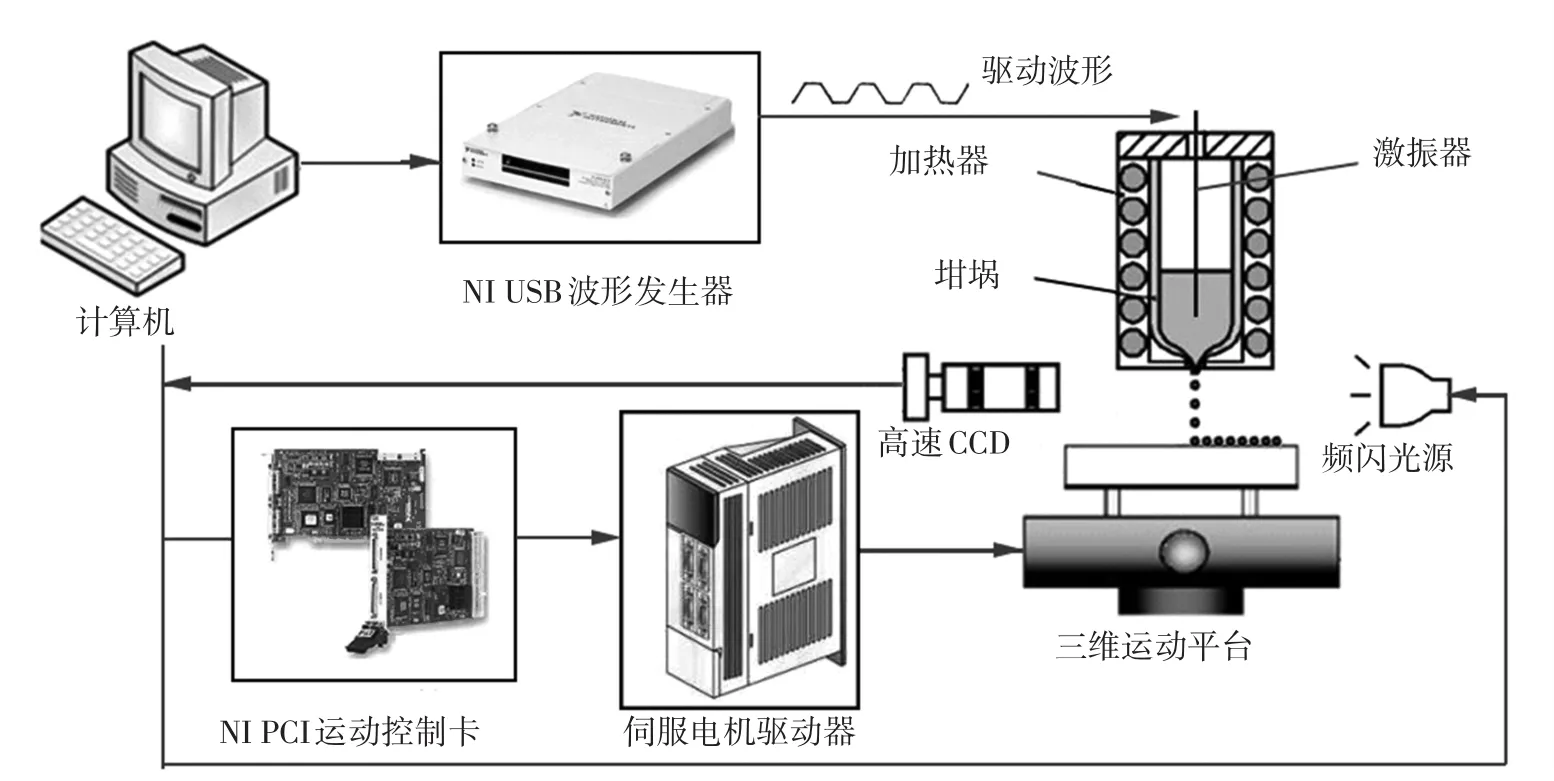
图1 微滴喷射沉积加工系统的总体结构
本系统所设计的运动平台行程为200 mm× 200 mm×200 mm,用丝杠螺母作为传动装置,选用欧姆龙的EE-SX674型光电传感器作为限位开关.X轴方向的直线导轨的导程为10 mm,重复定位精度为±0.003 mm,定位精度为0.025 mm.Y、Z方向的直线导轨导程为5 mm,重复定位精度为±0.003 mm,定位精度为0.020 mm.
整个运动系统硬件平台如图2所示.
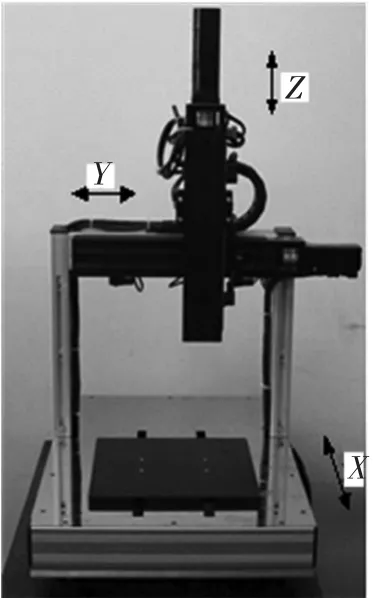
图2 打印沉积运动平台
系统采用PC和运动控制卡方式,运动控制卡选用NI公司的PCI-7354,可以同时进行4路电机控制信号的输出,内置8路16位模拟输入,便于编码器反馈.运动平台选用安川电机SGMJV系列伺服电机,选择位置控制模式进行控制.
2 基于LabVIEW的多轴运动控制系统设计
系统的软件设计主要分为打印数据的读取与处理和运动程序的编制.主要设计流程如下:程序开始后,先将坐标文件中的所有数据读取到程序中,进行路径规划处理形成新的坐标文件,然后依次读取新的坐标文件中的数据点坐标并驱动平台运动,判断是否达到终点,到达终点后结束运动程序,否则就根据坐标的差值进行运动.运动控制系统组成框图如图3所示.
电机运动控制程序主要分为以下两个部分:初始化和运动轨迹控制.本系统利用各个坐标轴上的限位开关进行零点的定位.NI Motion中提供了一个寻找参考点的VI,利用One⁃Axis Home&Index子VI实现初始化[9].
在控制系统中可以选择控制方式、对应的轴、运动的距离对运动平台进行微调.由于要进行精确控制,故在配置伺服驱动器时,设置其电子齿轮减速比为1/10.运动控制卡驱动方式选择P⁃Command驱动器方式,可实现位置误差检查.控制系统的主控制程序为三轴运动控制,不仅可以控制各个轴的运动位置,还可以控制运动速度和加速度,并且可以分别设定启动的加速度和停止的加速度,同时还可以实时读取各轴的位置并返回,另外提供了紧急停止程序的按钮,以防发生意外情况.
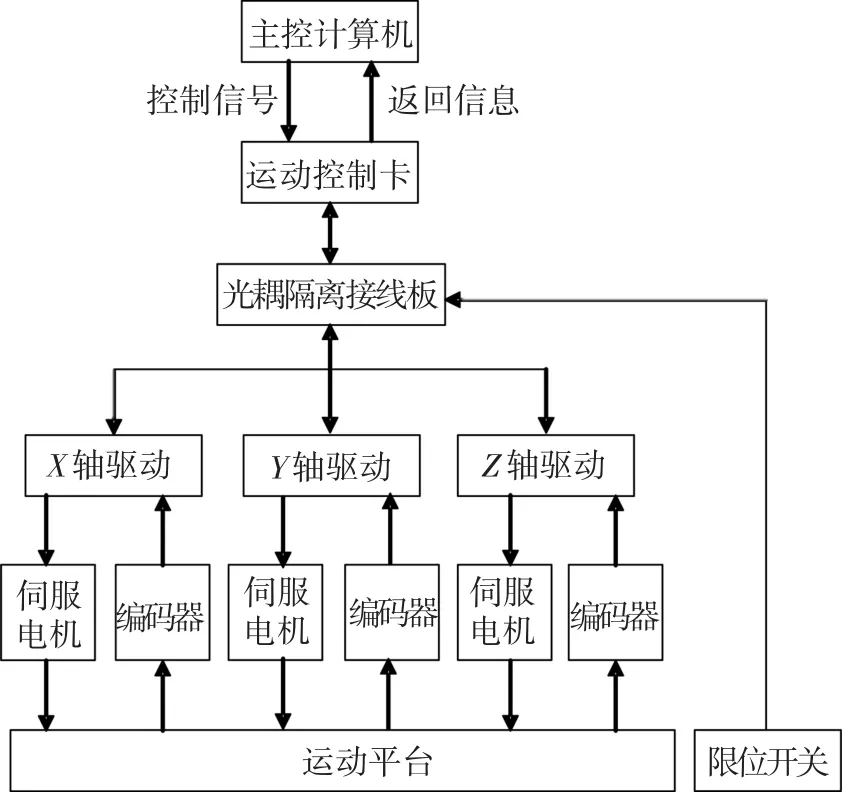
图3 运动控制系统框图
实现上面的各个模块后,通过一个主程序对上面各模块进行集成,同时进行坐标脉冲计算,以满足对系统的整体要求.系统前控制面板可以直观地设置控制参数和显示程序结果.在前面板中可以对运动控制卡ID和坐标文件路径进行选择,并且可以对坐标文件的坐标间距和丝杠螺距进行设定.同时还可以对电机的运动速度和加速度进行设定,并可以通过返回的坐标值来判断程序运行的正确性.
3 路径规划算法及其实现
运动控制系统中设定打印数据以坐标形式给出,根据坐标值便可以计算出相应的电机的位移,从而规范了数据格式.默认的坐标数据文件存放在由Excel创建的.xls文件中.这样便于对数据进行编辑,也方便将数据从数据库文件中导出.通过对LabVIEW中ActiveX数据接口的调用,实现数据文件的读取[10].
由于面阵列集成电路互联凸点在电路板上的布置以阵列形式存在,当给定需要打印的凸点坐标时,控制系统会沿规定坐标顺序运动,打印前需要对运动路径进行处理,找到一条便于运动的路线.将工作平台抽象成一张二维的网格图,将用户给定的数据作为坐标,需要找到一条访问每个待打印的点至少一次,且能够保证总的路程较短、规划较为合理的路径.这类问题被归结为旅行商类问题(TSP),属于组合优化范畴[11].该类问题利用穷举法、动态规划算法、遗传算法等传统启发式算法进行求解效率过低[12],本系统采用蚁群算法进行TSP类问题的求解[13-15].针对打印运动平台的要求,对蚁群算法进行改进,加入反馈机制,使计算结果更加趋近于绝对最优解.
在本系统中,假设t时刻位于点i的蚂蚁数目为ai(i),在t时刻路径(i,j)的信息量为τij(t),i点到j点的距离用dij表示.由于运动平台X-Y轴各自独立运动,故两点之间的距离定义为两点的横坐标之差的绝对值与纵坐标之差的绝对值之和.设所有用户数据集合为N,数据规模(即用户数据点的数量)为n,则可得到系统中搜索蚂蚁的总数量为.设定蚁群中蚂蚁的总数等于数据点数,即m=n.设蚂蚁s行走的点集合为L(s),初始时L(s)为空集,1≤s≤m.k表示整个算法循环次数,ηij表示由点i到点j的期望程度,称之为启发式函数:
算法执行过程如下:
首先设置算法的停止规则为k<500.
步骤1 判断是否满足算法的停止规则,如果满足,则停止计算,输出当前计算的最短路径以及最短距离;否则,则使蚂蚁s从起点i0出发进行访问.
步骤2 将蚂蚁按照1≤s≤m的顺序分别进行计算,当蚂蚁在点i时,对L(s)进行判断,如果L(s)≠N,则根据式(1)对点j进行访问判断[16]:

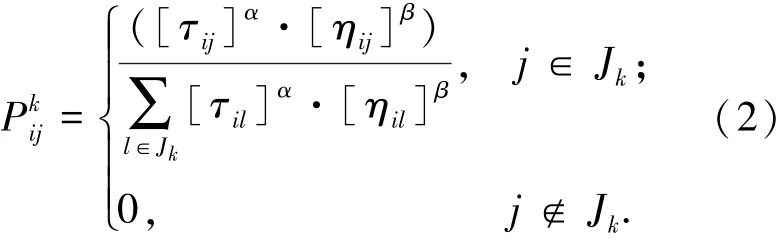
其中:Jk={N-tk},表示蚂蚁下一步允许选择的点;tk称为禁忌表,用来记录蚂蚁k所有已经走过的点;α、β是给定的系统参数,分别代表信息素的强弱和两点距离远近对蚂蚁选择下一坐标的影响程度,其中α称为信息启发式因子,其值越大,蚂蚁越容易选择其他蚂蚁走过的路径,在本系统中取值为1;β为期望启发式因子,反映了蚂蚁受距离因素对其下一点判断的影响,这里取值为2;q是在[0,1]区间上均匀分布的随机数,q0(0≤q0≤1)为系统设定的状态转移规则的限定值,其大小决定了利用之前结果与探索新路径之间的相对重要性.为了使计算较为简单,取q0=0.9.当q≤q0时,该蚂蚁则根据之前的计算结果选择路径,否则,该蚂蚁就根据式(2)进行对新路径的探索[17]:
若Jk≠Φ,则访问后,L(s)=L(s)∪{j};若Jk=Φ,则访问后,L(s)=L(s)∪{i0}.重复步骤2的计算.
如果L(s)=N或Jk=Φ,则完成对第s只蚂蚁的计算,进行步骤3的计算.
步骤3 对于1≤s≤m,如果L(s)=N,则按照L(s)中点的顺序计算路径总长度,记为f(L(s));若L(s)≠N,则将路径长度置为无穷大.对m只蚂蚁的路径长度进行比较,记其中走最短路径的蚂蚁为r,此次搜索之前已经得到的最短路径为W(f(W)初始化为无穷大),若f(L(t))<f(W),则令W=L(t).
然后利用式(3)对W路径上的信息素痕迹进行加强,对其他路径上的信息素进行挥发[18]:
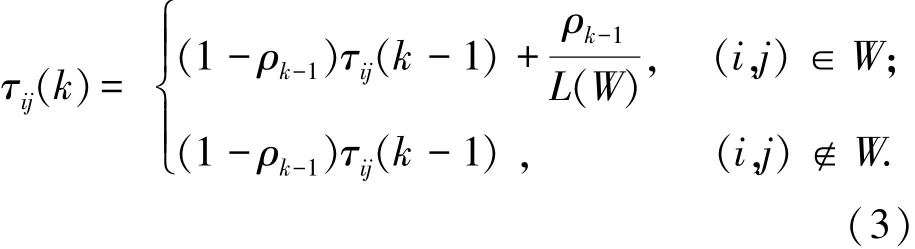
式中,挥发因子ρk对于一个固定的循环次数k≥1,满足如下关系:
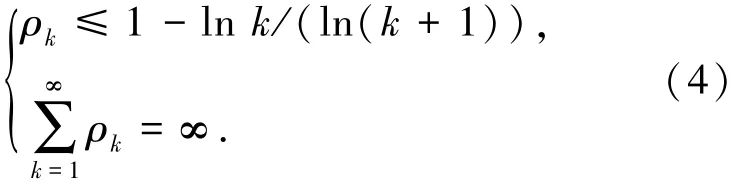
式(4)说明如果一条边不是最优路径,在经过k次挥发后,其信息素逐渐减少至消失[17].根据式(3)、(4),可以得到新的τij(k),令k=k+1,重复步骤1.
算法中只有全局最优的蚂蚁才被允许释放信息素,其目的是保证蚂蚁的搜索主要集中在当前循环为止所找出的最好路径的领域内,可以有效地避免蚂蚁收敛到同一路径,且减少了无效搜索的次数[17].采用信息素挥发的机制,目的是为了增大那些没有被访问到的边的搜索概率,有助于搜索区域的扩展,防止了系统过早陷入局部最小值,使系统具有了负反馈的功能[19].而采用了信息素增强过程可以实现由单个蚂蚁无法实现的集中行动,实现了最优路径上的信息素增强,使系统具有了正反馈的功能.这样可以使整个规划系统具有正负反馈功能,提高了系统的精度,也对系统的搜索进行了优化.算法最终结束时,蚁群记忆了到目前为止的最优路径及对应的最短距离.
该蚁群算法无法在LabVIEW中直接实现,利用Matlab语言编写M文件,利用Visual C++将M文件编译为dll文件,然后在LabVIEW中进行调用,实现路径的规划.
4 实验结果
控制系统运行后,首先进行运动路径的规划.图4为进行路径规划前后运动路线的对比,图4(a)表示根据凸点分布数据没有进行路径规划时的运动路径,此时运动过程中运动的总路程为73个坐标单位;图4(b)表示进行路径规划后的运动路径,可计算运动的总路程为39个坐标单位.路径规划之后的运动路程较未规划时的路程减少了46%,有效提高了效率.
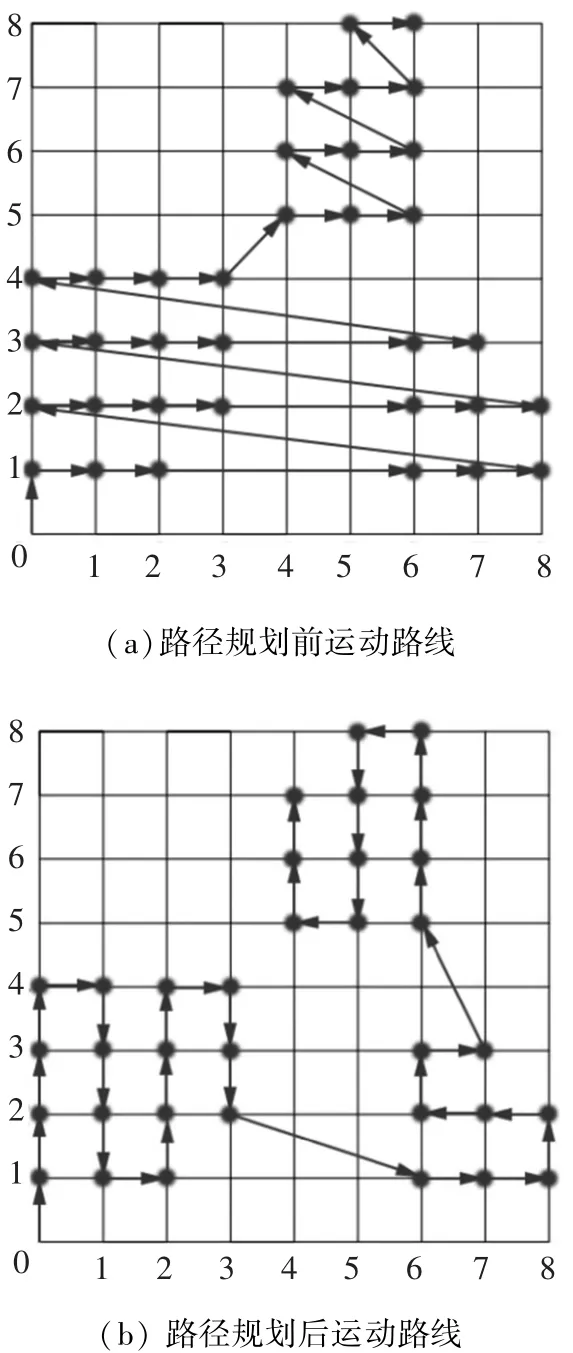
图4 路径规划前后运动路线的对比
平台运动精度利用API公司的XD6多维激光干涉仪进行精度测量.凸点喷射打印由X-Y方向运动决定,故只进行X、Y轴直线导轨进行定位精度、重复定位精度的测量.本运动系统进行了路径规划工作,打印过程中会出现反复变向的运动,故在进行定位精度测量时,不进行反向间隙的消除工作.在得到X、Y轴的双向测量数据后,利用残差法对两轴导轨的反向间隙进行计算.采用消除反向间隙之后,正向逆向对同一点进行4次测量的方式进行该运动平台的重复定位精度的测量.本实验以零点的重复定位精度为例.X、Y轴定位精度与原点处的重复定位精度测量结果见表1.
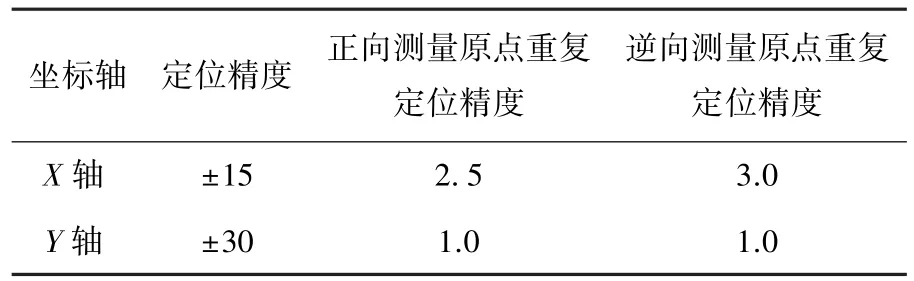
表1 X、Y轴定位精度与原点处重复定位精度测量结果/μm
两轴的定位精度均达到目前BGA系统的定位精度要求.Y轴的定位精度比X轴的定位精度稍差,其原因是Y轴上负载较大,且负载并非均匀加载于Y轴上,造成了Y轴产生了挠曲变形,使其定位精度变差.但两轴的原点处重复定位精度均较高,两轴的重复定位精度均满足系统的要求.
5 结 论
1)针对面阵列封装凸点微熔滴喷射打印过程,搭建了三轴凸点打印运动平台,开发了基于LabVIEW的微滴喷射打印平台运动控制系统,实现了平台的驱动控制.
2)在运动控制系统中利用蚁群算法进行了面阵列互联凸点打印平台运动路径的优化,经验证,控制系统可减少运动距离,有效提高打印效率.
3)对运动平台的定位精度及重复定位精度进行了测量,可满足面阵列BGA封装凸点打印的精度要求.
[1]鲜飞.芯片封装技术的发展历程[J].印刷电路信息,2009(6):67.
[2]段晋胜,轧刚.喷镀系统在凸点制备中的应用[J].电子工艺技术,2009,30(3):166-168.
[3]邹欣珏.基于BGA芯片的激光植球系统的设计与研究[D].上海:上海交通大学,2006:35.
[4]高胜东,姚英学,崔成松.金属均匀液滴束流技术的应用[J].材料导报,2006,20(1):95-97.
[5]GAO Shengdong,YAO Yingxue,CUI Chengsong.The study on droplet⁃based circuit board printing technology[J].Journal of Harbin Institute of Technology(New Series),2005,12(SUPPL.2):145-148.
[6]朱天柱.压电式喷射三维打印成型系统开发[D].武汉:华中科技大学,2012:23-30.
[7]张鸿海,朱天柱,曹澍,等.基于喷墨打印机的三维打印快速成型系统开发及实验研究[J].机械设计与制造,2012,7(7):122-123.
[8]谷峰春.压电驱动喷射式点胶机的研究[D].长春:吉林大学,2012:39-42.
[9]National Instruments.NI⁃MotionTMHelp[EB/CD]. Austin,Texas:National Instruments,2012[2013-11-20].http://www.ni.com/pdf/manuals/372134f.zip.
[10]胡绍海,高亚峰,肖坦.基于LabVIEW的Excel报表生成技术研究[J].测控技术,2007,26(10):64-66,69.
[11]CRMEN T H,LEISERSON C E,RIVEST R L,et al.Introduction to algorithms[M].2ndEdition.[S.l.]:MIT Press,2001.
[12]刘照卿.基于货郎担问题的算法比较[J].软件导刊,2008,7(10):59-61.
[13]DORIGO M,MANIEZZO V,COLORNI A.The ant system:optimization by a colony of cooperating agents[J].IEEETransactionsonSystems,Man,and Cybernetics,Part B,1996,26(1):29-41.
[14]DORIGO M,GAMBARDELLA L M.Ant colony system:a cooperative learning approach to the traveling salesman problem[J].IEEETransactionsonEvolutionary Computing,1997(1):53-66.
[15]CHU Shu⁃C,RODDICK J F,PAN J S.Ant colony system with communication strategies[J].Information scienses,2004,167:63-76.
[16]GAMNARDEELA L M,DORIGO M.Ant-Q:a reinforcementlearningapproachtothetraveling salesmanproblem[C]//Proc12thInternational Conference on Machine Learning.Tahoe City:CA,1995:252-260.
[17]燕忠,袁春伟.用蚁群优化算法求解中国旅行商问题[J].电路与系统学报,2004,9(3):122-126.
[18]GABARDELLA L M,DORIGO M.Solving symmetric and asymmetric TSPs by ant colonies[C]//Proc IEEE International Conference on Evolutionary Computation. Nagoya,Japan:[s.n.],1996:622-627.
[19]王沛栋,唐功友,杨熙鑫,等.一种求解旅行商问题的改进蚁群算法[J].中国海洋大学学报:自然科学版,2013,43(1):93-97.
(编辑 杨 波)
Plane array package interconnect bump drop⁃on⁃demand printing platform control system
GAO Shengdong,LIU Ronghui,YAO Yingxue
(School of Mechanical Engineering,Harbin Institute of Technology,150001 Harbin,China)
A micro⁃droplet printing deposition 3⁃axis motion platform was established to achieve efficient plane array package interconnect solder bumps jet printing.The platform and the multi⁃axis motion control system were developed based on LabVIEW,with the structure of“PC+motion control card”.According to the coordinate data of the solder bumps,the jet printing movement path optimization was realized with ant colony algorithm,and the efficiency of movement was also improved effectively.A laser interferometer was used to measure the repeatability and positioning accuracy of the motion platform,and the results showed that the motion platform could meet the accuracy requirement of the BGA packaging technology.
packaging;solder bump;drop⁃on⁃demand;multi⁃axis motion control;path planning;ant colony algorithm
TH16
:A
:0367-6234(2014)11-0037-05
2013-12-18.
国家自然科学基金(51075090);中国博士后科学基金(2011M500655);中国博士后科学基金特别资助(2012T50341).
高胜东(1973—),男,副教授;
姚英学(1962—),男,教授,博士生导师.
高胜东,sdgao@hit.edu.cn.