四缸双作用斯特林发动机平衡改进设计
2014-06-24霍军周
霍军周,李 涛,张 旭,杨 静,路 林
(1.大连理工大学机械学院,辽宁大连116024;2.道依茨一汽(大连)柴油机有限公司,辽宁大连116024)
四缸双作用斯特林发动机平衡改进设计
霍军周1,李 涛1,张 旭1,杨 静1,路 林2
(1.大连理工大学机械学院,辽宁大连116024;2.道依茨一汽(大连)柴油机有限公司,辽宁大连116024)
四缸U型传动机构是斯特林发动机输出功率的核心部件,其设计的合理与否直接与斯特林发动机系统运行的稳定性、效率、寿命密切相关。基于四缸U型传动机构的特点,建立了传动机构动平衡配重的理论模型,获得了曲轴及输出轴上配重的质量和相位;进而基于多体动力学仿真平台,建立了4缸双作用斯特林发动机传动机构动力学仿真模型,为更真实地模拟曲轴实际运行状态,采用哑元及万向铰连接方法建立了曲轴等效模型,采用虚拟油膜的方法建立了滑动轴承支撑等效模型。动力学仿真结果表明:相比原传动机构模型,改进后的传动机构输出轴、左曲轴和右曲轴速度波动系数分别降低了11.5%、36.8%和34.4%;输出轴质心振动位移均值降低了20.0%;基座承受的动载荷均值降低了23.4%;验证了改进方案可行性和有效性,为斯特林机传动机构的设计提供一定的理论依据。
斯特林发动机;传动机构;动平衡;动力学仿真
斯特林发动机是一种外部供热(或燃烧)的活塞式发动机,它以气体作为工质,按闭式回热循环的方式进行工作,具有燃料来源广、效率高、污染小、噪音低和维修方便等优点[1-3]。斯特林发动机传动系统属于转子系统范畴,近年来国内外学者对转子系统动力学特性进行大量的研究,代表性的研究有东北大学马辉、孙伟、于涛等[4-7]以旋转机械产品为背景,建立了考虑多种复杂因素的旋转机械轴承-转子系统的动力学模型、测试与故障诊断平台,深入地研究不同因素影响下轴承-转子系统的动力学行为及故障发生机理,为旋转机械设计-分析-诊断提供理论依据。曲柄连杆机构运动时要产生往复惯性力和离心惯性力及反力矩,它们通过曲轴轴承和曲轴箱传给支承,引起振动[12-13]。因此曲轴的动平衡作为曲柄连杆机构设计、制造和检验重要工作,有很多专家学者对其进行了深入的研究,王德荣、曲贵龙、岳明君、董丹丹等[8-11]针对各种形式的发动机曲轴,对其动平衡原理和方法进行了研究,并建立动力学模型进行了分析,得到了曲轴动平衡的改进模型,为曲轴动平衡试验提供理论基础。但目前的研究主要是针对单曲轴动平衡进行的改进设计,而对于双曲轴动平衡研究的文献十分少见,因此对斯特林发动机的双曲轴动平衡的研究有着重要的理论意义和实践价值。在动平衡理论计算的基础上,对改进前后的模型进行多刚体动力学仿真分析。
1 四缸U型传动机构动平衡理论模型
曲柄连杆机构采用2根曲轴和1根输出轴,曲轴和输出轴之间通过齿轮连接。四缸双作用U型传动机构的结构如图1所示[15]。气缸产生的1次和2次往复惯性力分别如图2、3所示。
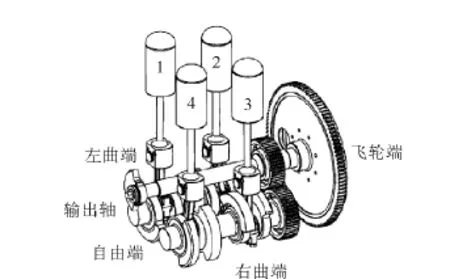
图1 四缸U型传动的曲柄连杆机构Fig.1 Crank and connecting rod mechanism of fourcylinder U-shaped transmission
由于高于2次的往复惯性力数值较小,同时平衡2次以上往复惯性力的结构复杂,故一般考虑到2次惯性力为止[14]。同时每缸旋转质量产生的离心惯性力大小相同,但由于发动机的曲拐夹角按90°均匀分布,因此1次往复惯性力、2次往复惯性力和离心惯性力自行抵消,即

式中:pjⅠi为第i缸往复质量产生的1次往复惯性力(i=1、2、3、4),pjⅡi为第i缸往复质量产生的2次往复惯性力,pri为第i缸旋转质量产生的离心惯性力。由图2可知活塞杆组1和3、2和4一次往复惯性力变化规律均不一致,一次往复惯性矩无法自平衡;由图3可知活塞杆组1和3,2和4产生的二次往复惯性力变化一致,而活塞杆组1和活塞杆组2产生的二次往复惯性力相位差180°,故二次往复惯性力产生的力矩也自行抵消,即

式中:MⅡi为第i缸往复质量产生的2次往复惯性力矩,i=0、1、2、3。因此,尚存有1次往复惯性力和离心惯性力产生的力矩没有平衡,需在旋转轴上加适当质量的平衡块。

图2 1次往复惯性力Fig.2 The first order reciprocating inertia force

图3 2次往复惯性力Fig.3 The second order reciprocating inertia force
将一次往复惯性力矩分成2个1/2力矩分别平衡一次往复惯性力和离心惯性力产生的力矩[15]。平衡块质量组成和位置如图4所示[8]。图中1~4方块分别代表1~4号缸处在不同相位的曲柄;0代表输出轴自由端和飞轮端不同相位的平衡重块;Ⅰ、Ⅱ、Ⅲ代表左右曲轴不同相位的平衡重块。
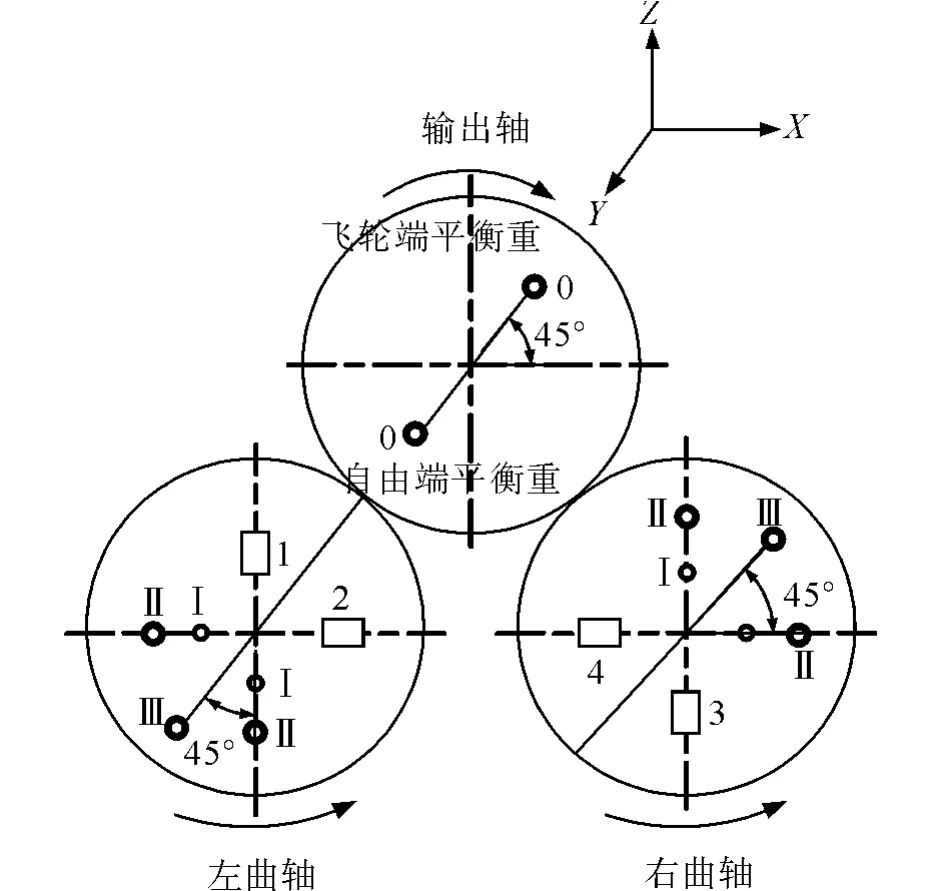
图4 前视平衡重块相位图Fig.4 The front view phase diagram of counterweight
每个曲臂上的曲柄销相反的方向加平衡重块,mⅠ使它产生的离心惯性力与曲柄连杆机构存在的离心惯性力和离心惯性力矩相抵消;m0、mⅡ和mⅢ则抵消了1次往复惯性力矩。由平衡方程可得各平衡重块的关系:
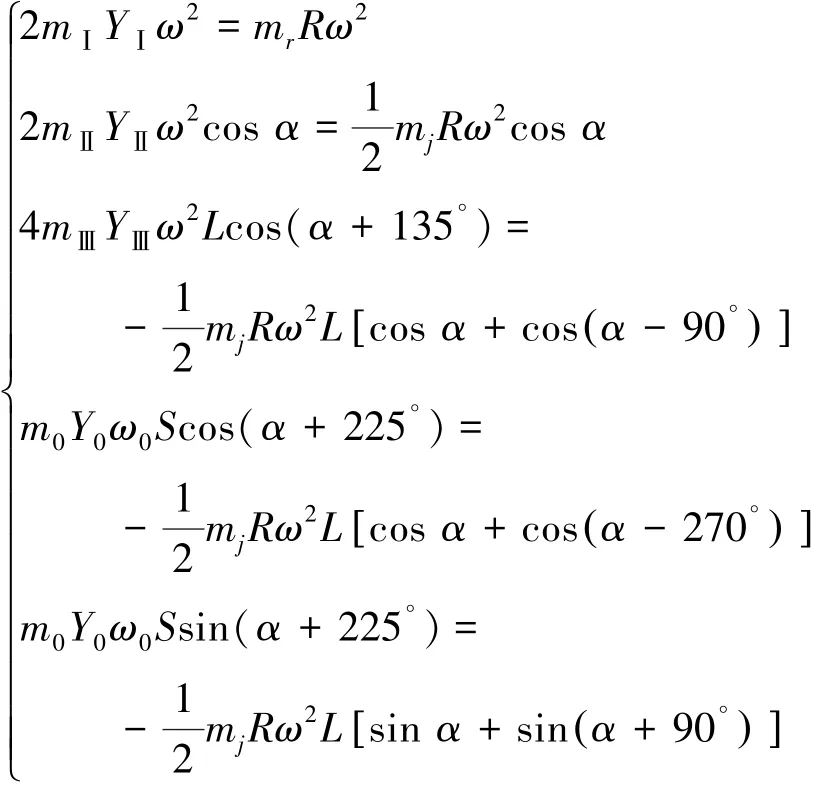
即:

式中:mi(i=0,Ⅰ,Ⅱ,Ⅲ)为第i个平衡重块的质量,mr为发动机每缸回转运动零件的质量,mj为发动机每缸往复运动零件的质量,Yi为第i个平衡重块到各旋转轴回转中心的距离,S为两平衡重块m0之间的轴向距离,R为曲轴半径。
根据平衡块的质量、相位以及回转半径,即可得到左、右曲轴的回转中心的坐标。输出轴配重后的质心保持不变。故对输出轴的配重只需求得平衡重块的质量、相位及回转半径。配重后左、右曲轴系统的质心:
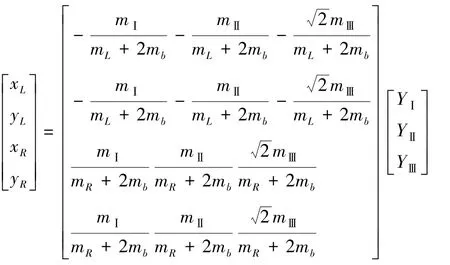
式中:mb=mⅠ+mⅡ+mⅢ,为各平衡块质量和;mL、mR为配重前左曲轴和右曲轴的质量;xL为左曲轴横坐标;yL为左曲轴纵坐标;xR为右曲轴横坐标;yR为右曲轴纵坐标。
2 发动机传动机构动力学仿真模型
本节按照上节得到的理论模型对斯特林发动机传动机构动平衡进行了改进,分别对改进前后的模型进行了动力学分析,并将仿真结果进行了对比,以验证动平衡理论模型的正确性。
2.1 基于动平衡配重的四缸U型传动机构改进方案
为了减轻平衡重质量并利用曲轴箱空间,可尽量使平衡重的质心远离曲轴中心线。通常使平衡重的回转半径等于或略小于曲柄半径R,并把平衡重设计成扇形或月牙形,以便使其质心外移,增大回转半径。
这样,平衡重便能发挥最大的平衡效果。同时根据平衡理论模型,即可得到各平衡块的质量和回转半径如表1所示,左右曲轴质心坐标如表2所示。
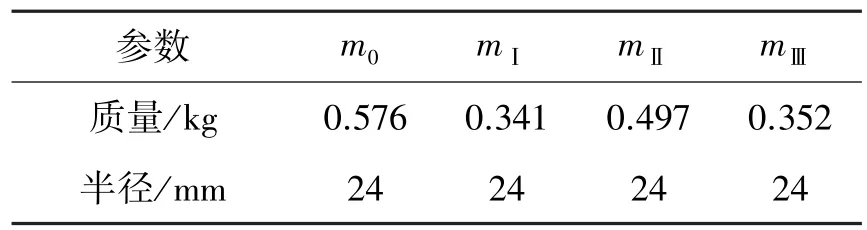
表1 平衡重块的质量Table 1 The quality of counterweight

表2 平衡重块的坐标Table 2 The coordinates of counterweight mm
改进配重后曲轴模型如图5所示,改进配重后输出轴模型如图6所示。
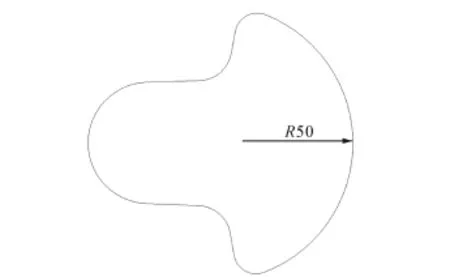
图5 改进曲轴模型Fig.5 Modified crankshaft model

图6 改进输出轴模型Fig.6 Modified output shaft model
2.2 曲轴和滑动轴承支撑等效模型建立
由于该发动机每个曲轴有3个主轴颈,属于静不定结构,ADAMS中无法直接求解。因此建模时将曲轴剖分为3个独立构件,曲柄与中间轴段以哑元通过固定铰链和万向铰链连接,只保留绕z和y轴的旋转自由度。曲轴等效模型如图7所示。模型考虑了主轴颈处是弹性支承的实际运行情况。滑动轴承支撑曲轴的等效模型如图8所示。其中滑动轴承的平均支撑刚度系数和阻尼系数如表3所示。

图7 曲轴等效模型Fig.7 The equivalent model of crankshaft

图8 滑动轴承等效模型Fig.8 The equivalent model of sliding bearing
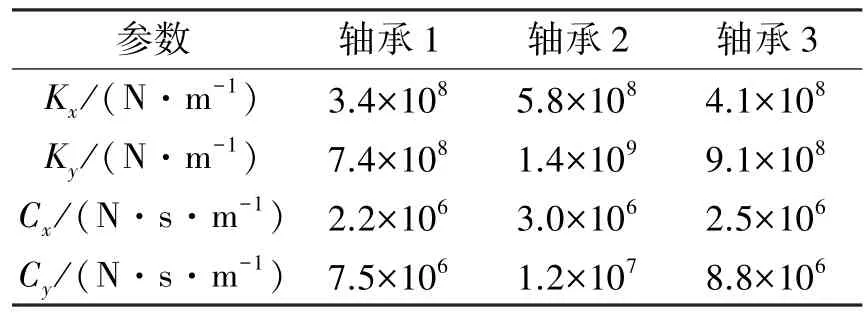
表3 滑动轴承平均刚度和阻尼系数Table 3 The average stiffness and damping coefficients of sliding bearing
基于施密特分析方法对4缸双作用斯特林发动机的斯特林热循环进行分析,得出每缸热腔和冷腔的压力曲线,从而得出每缸作用在活塞杆压力曲线。
对企业提供模型的活塞组、连杆组和曲柄组进行合理简化和等效得出单缸回转运动和往复运动零件的质量,利用上述动平衡方案改进传动机构,进而建立了改进平衡重后的实体模型。
3 仿真结果对比分析
通过Adams仿真可得到左、右曲轴以及输出轴角速度波动和质心振动以及机体所承受载荷。
1)输出轴和曲轴速度波动系数。提取发动机稳定工作状态后最后1 s转速变化曲线如图9所示,各轴转速波动系数如表4所示。
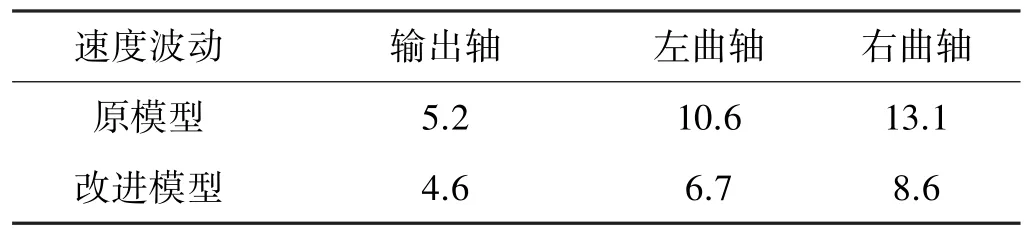
表4 输出轴及曲轴的速度波动系数Table 4 Speed fluctuation coefficient of rotation axis %
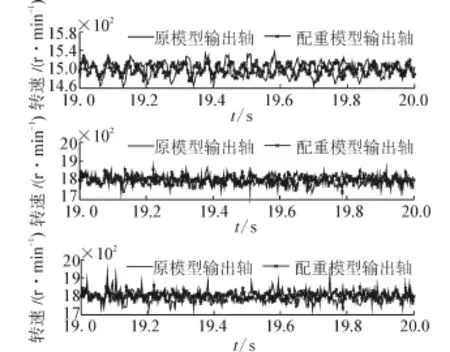
图9 原模型和改进模型旋转轴的转速变化曲线Fig.9 Speed curve of the rotation axis of the original model and the improved model
由图9和表4可知,改进后模型输出轴的速度波动系数比原模型降低了11.5%,左、右曲轴的速度波动系数比原模型分别降低了36.8%和34.4%,对输出轴和曲轴转速波动的平稳性有很大的提高。
2)输出轴和左、右曲轴质心振动。图10、图11分别为原模型和改进模型输出轴质心振动曲线。图12、图13分别为原模型和改进模型曲轴各轴段质心振动曲线。
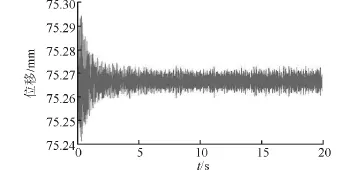
图10 原模型输出轴质心振动曲线Fig.10 Output shaft centroid vibration of the original model
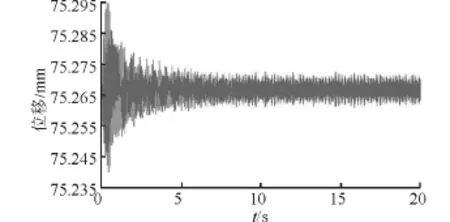
图11 改进配重后模型输出轴质心振动曲线Fig.11 Output shaft centroid vibration of the modified model
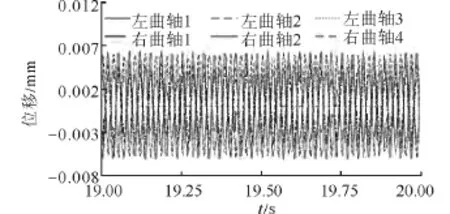
图12 原模型曲轴质心振动曲线Fig.12 Crankshaft centroid vibration of the original model
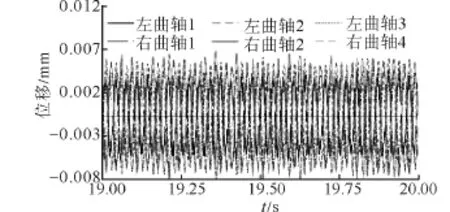
图13 改进配重模型曲轴质心振动Fig.13 Crankshaft centroid vibration of the modified model
由图10~13可得输出轴和曲轴质心在稳定后(最后1 s)的振动幅值,如表5所示。

表5 输出轴及曲轴的质心振动幅值Table 5 The vibration amplitude of rotation axis centroid um
由表5可得,改进模型的输出轴质心振动幅值降低了16.7%,而左、右曲轴的质心振动幅值约增大了20%。由于各曲轴经过改进有一定的偏心,故曲轴质心振动幅值有所增大,但输出轴质心振动幅值有明显下降,对输出功率的稳定性有很大提高。
3)机体承受的载荷。分别提取原模型和配重模型最后1 s机体所受的合力如图14所示,机体所受的合力矩如图15所示,机体所承受的平均载荷如表6所示。
由图14、15和表6可以得出:改进后的模型机体受到的平均合力减小23.4%,力矩减少8.7%,并且经过配重模型的载荷波动明显减少,这对斯特林发动机机的所承受的载荷状况有很大的改善,并对整个太阳能发电系统稳定性有很大提高。

图14 机体所受的合力Fig.14 Resultant force on the airframe
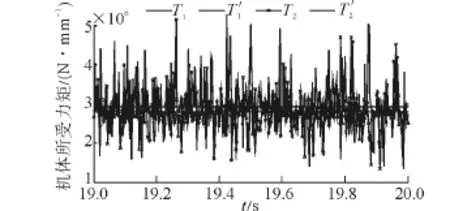
图15 机体所受的合力矩Fig.15 Resultant moment on the airframe

表6 机体所承受的平均载荷表Table 6 The average load on the airframe
4 结论
1)根据四缸U型斯特林发动机传动机构的布置特点,并对引起斯特林机振动的惯性力和惯性力矩进行计算,得到动平衡设计方案,为斯特林发动机动平衡改进提供理论依据。
2)仿真结果表明:相比原传动机构模型,改进后的传动机构输出轴、左、右曲轴速度波动系数分别降低了11.5%、36.8%和34.4%;输出轴质心振动位移均值降低了20.0%;基座承受的动载荷均值降低了23.4%。证明了动平衡改进方案的正确性,对提高斯特林发动机稳定性有一定的实际意义。
3)通过ADAMS动力学仿真,还可以得到发动机在不同工况下的运动学规律和动力学特性,从而实现在其设计早期对产品结构和性能进行有效的预测和控制,从而为其设计生产提供理论依据和指导。
[1]李丰,陈鸿伟.斯特林发动机在能源利用领域中的应用[J].能源研究与利用,2006(4):30-32.
LI Feng,CHEN Hongwei.The application of Stirling engine in energy utilization[J].Energy Research and Utilization,2006(4):30-32.
[2]陈刚.斯特林发动机及其在我国的应用前景[J].农业工程学报,1993,9(S1):126-129.
CHEN Gang.Stirling engine and its use prospects in China[J].Transaction of the CSAE,1993,9(S1):126-129.
[3]BEALE W T,WOOD J G,CHAGNOT B F.Stirling engine for developing countries[J].American Institute of Aeronautics and Astronautics,1980(3):1971-1975.
[4]马辉,李焕军,刘杨,等.转子系统耦合故障研究进展与展望[J].振动与冲击,2012,31(17):1-11.
MA Hui,LI Huanjun,LIU Yang,et al.Review and prospect for research of coupling faults in rotor systems[J].Journal of Vibration and Shock,2012,31(17):1-11.
[5]马辉,太兴宇,汪博,等.松动一碰摩耦合故障转子系统动力学特性分析[J].机械工程学报,2012,48(19):80-86.
MA Hui,TAI Zingyu,WANG Bo,et al.Dynamic characteristic analysis of a rotor system with pedestal looseness coupled rub-impact fault[J].Journal of Mechanical Engineering,2012,48(19):80-86.
[6]孙伟,汪博,闻邦椿.高速主轴系统静止及运转状态下动力学特性对比分析[J].机械工程学报,2012,48(11):146-152.
SUN Wei,WANG Bo,WEN Bangchun.Comparative analysis of dynamics characteristics for static and operation state of high-speed spindle system[J].Journal of Mechanical Engineering,2012,48(11):146-152.
[7]于涛,韩清凯,李善达,等.双悬臂转子系统动力学特性及不平衡响应分析[J].振动、测试与诊断,2007,27(3):186-189.
YU Tao,HAN Qingkai,LI Shanda.Study on dynamic characteristics and imbalance response of double-over-hung rotor system[J].Journal of Vibration Measurement and Diagnosis,2007,27(3):186-189.
[8]王德荣,王秋晓,朱云飞.六缸曲轴动平衡理论的研究[J].机电工程,2004,21(6):45-48.
WANG Derong,WANG Qiuxiao,ZHU Yunfei.Research on dynamic balancing theory of six cylinders crankshaft[J].Mechanical and Electrical Engineering Magzine,2004,21(6):45-48.
[9]曲贵龙.曲轴动平衡的方法和应用[J].重型汽车,2004,4:17-19.
QU Guilong.The method and application of dynamic balance for crank[J].Heavy Truck,2004,4:17-19.
[10]岳明君,张强,冯显英.曲轴的高精度动平衡[J].内燃机,1998,16(2):27-29.
YUE Mingjun,ZHANG Qiang,FENG Xianying.The high precision balance of crank[J].Internal Combustion Engines,1998,16(2):27-29
[11]董丹丹,覃文洁,刘金祥.直列六缸发动机曲轴两种平衡方案的分析比较[J].内燃机工程,2006,2:39-42.
DONG Dandan,QIN Wenjie,LIU Jinxiang.Analysis and comparison on two kinds of crankshaft balance method for in-line 6-cylinder engines[J].Chinese Internal Combustion Engine Engineering,2006,2:39-42.
[12]马国清,卞学良,曹正永.发动机曲柄连杆机构动力学仿真研究[J].河北工业大学学报,2004,33(6):52-56.
MA Guoqing,DIAN Xueliang,CAO Zhengyong.Study on the dynanics simulation of crank-connecting rod mechanism of engine[J].Journal of Hebei University of Technology,2004,33(6):52-56.
[13]李斌,杨春雷,刘勇.曲柄连杆机构运动及动力特性分析[J].机械,2006(1):10-12,59.
LI Bin,YANG Chunlei,LIU Yong.Analysis on characteristics of the movement and force of crank-connecting rod mechanism[J].Machinery,2006(1):10-12,59.
[14]张保成,苏铁熊,张林仙.内燃机动力学[M].北京:国防工业出版社,2009:10-11.
ZHANG Baocheng,SU Tiexiong,ZHANG Linxian.Engine dynamics[M].Beijing:National Defense Industry Press,2009:10-11.
[15]金东寒.斯特林发动机技术[M].哈尔滨:哈尔滨工程大学出版社,2009:10-11.
JIN Donghan.Sterling engine technology[M].Harbin:Harbin Engineering University Press,2009:10-11.
(责任编辑:郑可为)
Improved design for dynamic balance of the transmission mechanism of the 4-cylinder double-acting Stirling engine
HUO Junzhou1,LI Tao1,ZHANG Xu1,YANG Jing1,LU Lin2
(1.School of Mechanical Engineering,Dalian University of Technology,Dalian 116024,China;2.DEUTZ(Dalian)Engine Co.,Ltd.,Dalian 116024,China)
The four-cylinder U-shaped transmission mechanism is the core component of the output power of the Stirling engine.The rationality of its design is closely related to its operational stability,efficiency and life of the Stirling engine system.Based on the characteristics of the four cylinder U-shaped drive mechanism,this paper built the theoretical model of the dynamic balance analysis of the transmission mechanism in order to get the quality and the phase of the balance weight on the rotation axis.Then the dynamics simulation model of the four-cylinder double-acting Stirling engine transmission mechanism was established through use of the multi-body dynamics simulation platform.In order to get a more realistic simulation of the crankshaft's actual operation conditions,this thesis established the crankshaft equivalent model with the dummy and universal hinge connection method,and the sliding bearing supported equivalent model with the virtual film method.The analysis results indicate that,compared with the original transmission mechanism model,the speed fluctuation coefficients of the output shaft and the crankshaft with the improved model are reduced by 11.5%,36.8%and 34.4%,respectively;the vibration displacement of the center mass of the output shaft is decreased by 20.0%;the average dynamic load on the airframe is decreased by 23.4%.The feasibility and effectiveness of the improvement program in this thesis has been verified,and as a result it can provide useful information for the design and operation of the Stirling engine's transmission mechanism.
Stirling engine;transmission mechanism;dynamic balance;dynamics simulation
10.3969/j.issn.1006-7043.201305058
TH212;TH213.3
A
1006-7043(2014)08-0987-06
http://www.cnki.net/kcms/doi/10.3969/j.issn.1006-7043.201305058.html
2013-05-21. 网络出版时间:2014-07-09 16:44:52.
国家自然科学基金资助项目(51375001);国家973计划资助项目(2013CB035400);辽宁省科技攻关资助项目(2011220031).
霍军周(1979-),男,副教授.
霍军周,E-mail:huojunzhou@dlut.edu.cn.
