利用船舶运动数据估计海浪方向谱的研究
2014-06-24赵大威丁福光谢业海杭栋栋边信黔
赵大威,丁福光,谢业海,杭栋栋,边信黔
(1.哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;2.昆明船舶设备研究实验中心,云南昆明650051)
利用船舶运动数据估计海浪方向谱的研究
赵大威1,丁福光1,谢业海2,杭栋栋1,边信黔1
(1.哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;2.昆明船舶设备研究实验中心,云南昆明650051)
有效的利用海浪方向谱的信息能够为船舶安全航行和动力定位控制提供帮助,传统的海浪谱估计方法使用波浪浮标等不能随船安装的仪器,不能用于作业中的船舶。对动力定位船舶进行定点作业情况下的海浪方向谱估计进行研究,提出一种基于船舶运动响应数据估计当前海浪方向谱的方法,采用多维AR算法估计船舶运动交叉谱,采用遗传算法求解海浪方向谱的最优参数,并对4种海况情况进行了仿真实验,验证了该方法的有效性。
方向谱;谱估计;多维AR;遗传算法;船舶运动
对于船舶自动航行控制系统,比如动力定位系统来说,正确预测船体受到的波浪载荷对于确保船舶航行安全和高精度定位控制是非常重要的。在船舶的动力定位控制中,需要利用船舶的推进器的推力克服风、浪、流的环境扰动力。利用风传感器可以测量相对风向和风速,从而在前馈控制中有效地抵消风的外力作用。如果加入波浪力前馈,系统能够对当前波浪力的作用做出足够的响应,就能极大地提高系统的控制性能。但目前对于波浪的测量很困难,也是其没有得到应用的原因。海浪方向谱能够细致地描述海浪的内部结构,并包含了海浪方向信息,在海洋学、造船学等多个研究领域得到高度关注。方向谱的测量方法主要有现场定点测量和卫星遥感2种测量方法[1-2]。现场定点测量一般采用波浪浮标,然而对于作业中的船舶来说,不可能在同一地点停留过长时间,现场定点测量无论从时效上还是实际操作上,对于正在行驶或作业的船舶来说都是不现实的[3]。
最近几年国外有学者提出利用船舶运动响应数据估计海浪方向谱的方法,也就是随船估计方法[4-5]。动力定位船舶一般都安装有运动姿态传感器,能够准确测量船舶的航行姿态,包括:纵摇、横摇、升沉等数据。目前利用船舶运动响应数据估计海浪方向谱主要有2种方法:非参数法和参数法[6]。参数法是指,首先确定波浪谱的具体形式,如JONSWAP谱,然后估计波浪谱的具体参数。参数方法包括自回归模型方法、最大熵法、最大似然估计法、超分辨率法[7]。非参数法是不指定波浪谱的具体形式,文献中主要是利用贝叶斯理论进行方向谱估计[8-10],但非参数方法的结果存在多解,比如180°的方向误差[11]。文献[12]研究了利用船舶运动数据反推海浪功率谱的方法,但没有包含海浪方向信息。文献[13]采用粒子群方法对海浪谱的参数寻优,但没有给出船舶运动交叉谱的估计方法。本文对动力定位船舶在零速度情况下的海浪方向谱估计进行研究,采用多维AR模型算法估计船舶运动交叉谱,采用遗传算法对海浪谱参数进行整定,并进行仿真验证。
1 基于MAR的运动交叉谱估计
海上航行船舶的运动姿态,由于受到海浪等带来的随机扰动,具有非平稳、非线性的复杂随机动力系统的主要特征。可采用时间序列方法研究该类问题。船舶存在6个自由度上的运动,本文使用纵摇、横摇、升沉这3个自由度上的运动响应,来估计海浪方向谱。这3组变量存在相关性,即使在某些情形下它们弱相关,但它们彼此与其滞后项的相关性不容忽视。若分别对这3个变量建立时序模型,可能会丢失数据信息,造成拟合失真。所以,本文采用多维自回归模型(multivariate autoregressive model,MAR)对船舶的运动响应数据进行计算,产生运动交叉谱。利用MAR进行谱估计相对于基于FFT的方法主要有2点明显的优势:1)功率谱可以在连续的频率上进行估计,而不会出现某个频率上的谱值丢失;2)功率谱值偏差较小[14]。
MAR模型通过对多个时间序列中的历史值分配权重,然后利用线性加权的方式估计当前值。计算过程中采用的历史值的个数被称为模型的阶数[15]。Whitle于1963年提出了一种迭代计算法,可以有效地解决MAR模型中系数的求解,从而避免了直接对最优系数的最小二乘估计。下面利用递归的方法求取MAR系数[16]。
1)假设有K个时间序列:
x1(s·Δt),x2(s·Δt),…,xK(s·Δt),s=1,2,…,N所有时间序列具有均匀且相同的采样周期Δt。
2)对每一个时间序列求平均值(假设Δt=1):

然后重新定义xi(s),s=1,2,…,K,则

3)计算K×K维协方差矩阵C,矩阵中的每一个元素的计算方法如下:

4)初始化矩阵AM(m)=BM(m)=0,式中:m、M=1,2,…,L。
5)在下面的递归过程中,计算AM(m),m=1,2,…,L和DM,M=0,1,…,L:
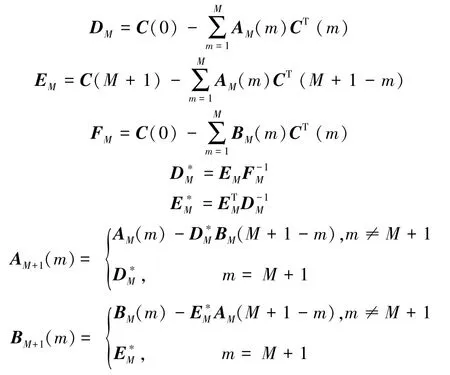
6)分别计算对应于M=1,2,…,L时,MFPE判据和BIC判据的值:
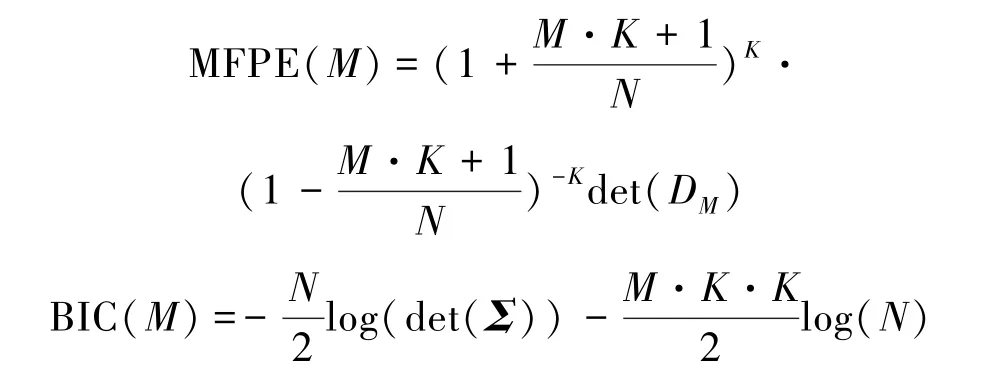
7)根据6)的计算结果,得出使MFPE取得最小值(或者使BIC取得最大值)的M,即为MAR最优阶数,即Mopt=M。
8)得出实际应用的交叉谱公式:

2 自适应遗传算法的方向谱估计
2.1 海浪方向谱估计
利用船舶运动响应数据估计海浪方向谱的方法认为在波浪中航行摇摆的船体也可以看做一种波浪浮标。假定波浪和船体运动之间存在线性的关系,从作为输出的船体运动反过来推算作为输入的海浪方向谱。实际上,动力定位船舶都装有运动传感器、罗经和位置参考系统,从而方便采用此方法估计海况。

式中:RAOm(ω,θ)为船舶运动响应幅值算子,ω为波频,θ为入射方向角,S ω,θ()为方向波谱,φmn(ω)为船舶运动响应交叉谱。运动响应幅值算子(RAO)描述船舶运动和组成规则波之间的关系,由振幅频率函数和相位频率函数组成,它决定于船体的几何形状、船速和遭遇角等。RAO可以通过2种方式得到:1)根据船舶自身的造型数据结合海浪谱推理计算得出;2)在通过水池实验得到。实际上无论在低海情还是高海情下,作用在船上的波浪力与船舶响应之间都是非线性关系的,受到海浪激励使船舶产生运动交叉谱与海浪谱的关系为部分和整体的关系。海浪激励频域与船舶运动响应频域一致时,两者大部分重合,反之两者差异增大。但不论在何种条件下,由船舶运动反推的海浪谱,都是对船舶实际起作用的那部分海浪能量的描述[12]。由于船舶的惯性,对海浪激励引起的运动产生了滤波的作用。所以往往海情较小时,反推的误差大;海情大时,反推的结果误差小。
2.2 基于遗传算法的方向谱参数整定
参数法估计海浪谱的原理是,在确定了方向谱谱型后,假设一组谱型参数,得到一个估计的方向谱值,通过式(1)得到的估计的运动响应交叉谱。利用基于MAR模型的谱分析方法对当前测量得到的船舶运动响应时间序列做谱分析得到当前海浪的交叉谱,最后采用最优化方法不断调整估计的方向谱参数,使得当前海浪的交叉谱与估计的交叉谱差值最小,此时通过优化算法得到的方向谱的参数就是估计的当前海浪的参数。其差值的表达式可以写成如下形式:
假设作用在船上的波浪力与船舶响应之间是线性关系,则船舶运动响应的交叉谱与运动响应幅值算子和海浪方向波谱之间存在如下关系:

把E(x)作为最优方法优化的目标函数。本文采用的海浪方向谱是以式(3)表示的4参数单峰谱,该方法对其他形式的方向谱同样适用。
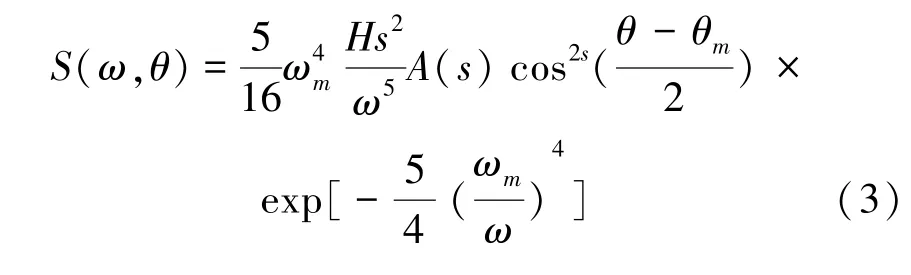
通过求解式(2)的最小值可以得到式(3)的4个参数,即[ωmHssθm]。此时,估计海浪谱的问题转化为参数优化的问题,即通过最优化算法,不断调整方向谱式(3)的4个参数,使式(2)的值达到可取参数的最小值。本文采用自适应遗传算法(AGA)进行参数优化。遗传算法是求解非线性优化问题的有效手段,且具有全局优化能力,具有良好的收敛性和鲁棒性。简单的遗传算法(SGA)存在优化过程的收敛速度慢,容易出现“早熟”的问题,使解的质量降低。自适应遗传算法在进化的过程中根据进化的不同阶段建立相应的交叉概率和变异概率,改善了算法的搜索能力和收敛速度。种群大小选为100个,每个个体由28个基因组成,前6个基因代表有义波高Hs,接下来6个代表扩散因子s,接下来9个代表平均波向θm,最后6个代表模值频率ωm。最大代数设为30代。目标函数为式(2),并按此式计算适应度。
3 仿真实验
为了验证方法的有效性,以某船舶为对象进行了仿真实验,仿真环境为Matlab7.0,船舶的主要尺寸为:船长82.8 m,船宽19.2 m,吃水6 m,排水量6.2×103m3。船舶为零速度状态。仿真海洋环境设定了4种海浪,见表1,分别采用本文提出的方法进行海浪谱估计。4种海浪对应的海况级别分别为8、7、6、5级。图1显示了海况2的船舶响应数据,即3个自由度的运动测量数据。
表2是估计的海浪方向谱的结果。设定的海浪谱与估计的海浪谱的对比如图2所示,图中的方向波谱是用等高线表示的。半径方向表示频率从0~1.5 Hz。从结果可以看出,海浪入射方向的估计很准确。当海况级别较低时,估计出的有义波高会出现较大的偏差,例如海况4。当海况级别较高时,例如给出的第1种海况,则能够以较高的精度估计出海浪的有义波高和模态频率。由于波浪扩散因子对船舶运动的影响较小,因此估计出扩散因子精度较低。另外,由海浪方向谱表达式可知,模态频率对海浪方向谱的数值的影响是最明显的,因此模态频率的正确性在很大程度上决定理论交叉谱与目标交叉谱之间的差距的大小。这一点在参数寻优的结果中也体现了出来,模拟的4种海况下,寻优算法都找出了可信度较高的模态频率值。
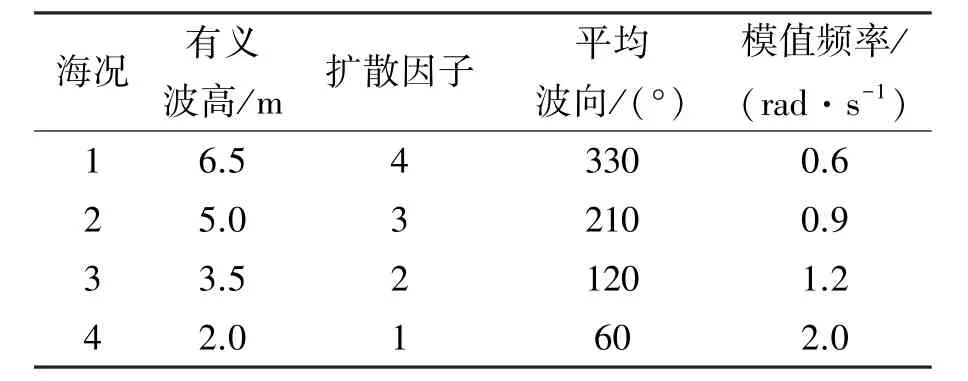
表1 仿真过程中设定的海浪参数Table1 Real spectrum parameters in the process of simulation
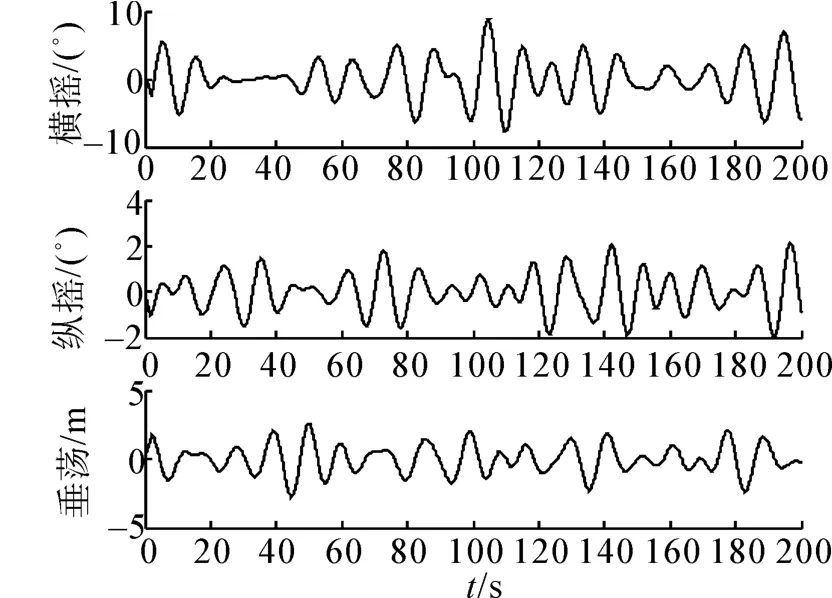
图1 海况2下船舶的运动响应数据Fig.1 Ship motion response data in sea state No.2
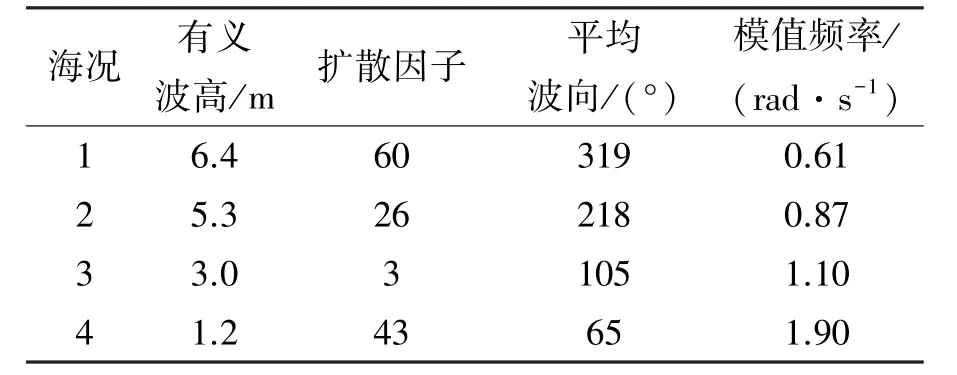
表2 海浪谱参数估计寻优结果Table2 Estimated spectrum parameters
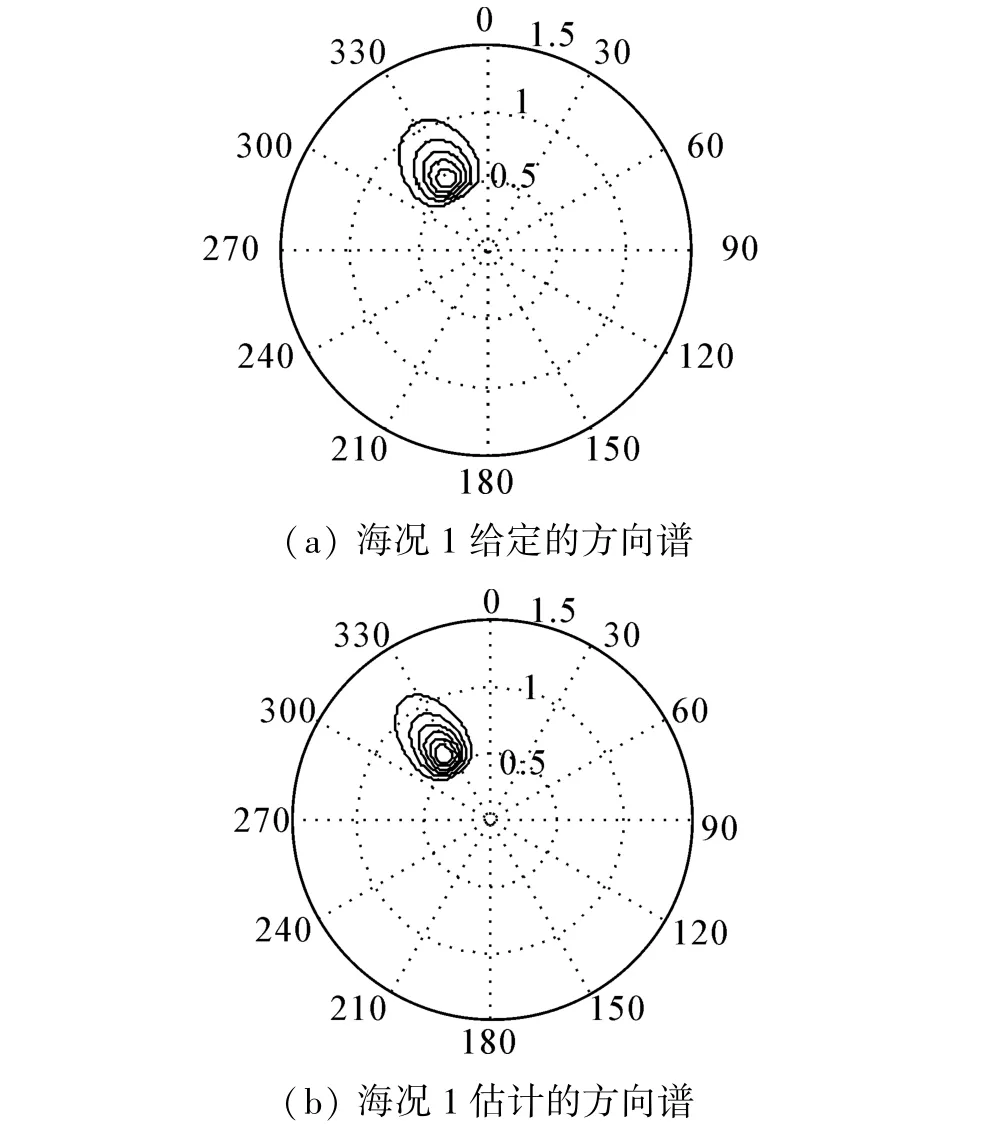
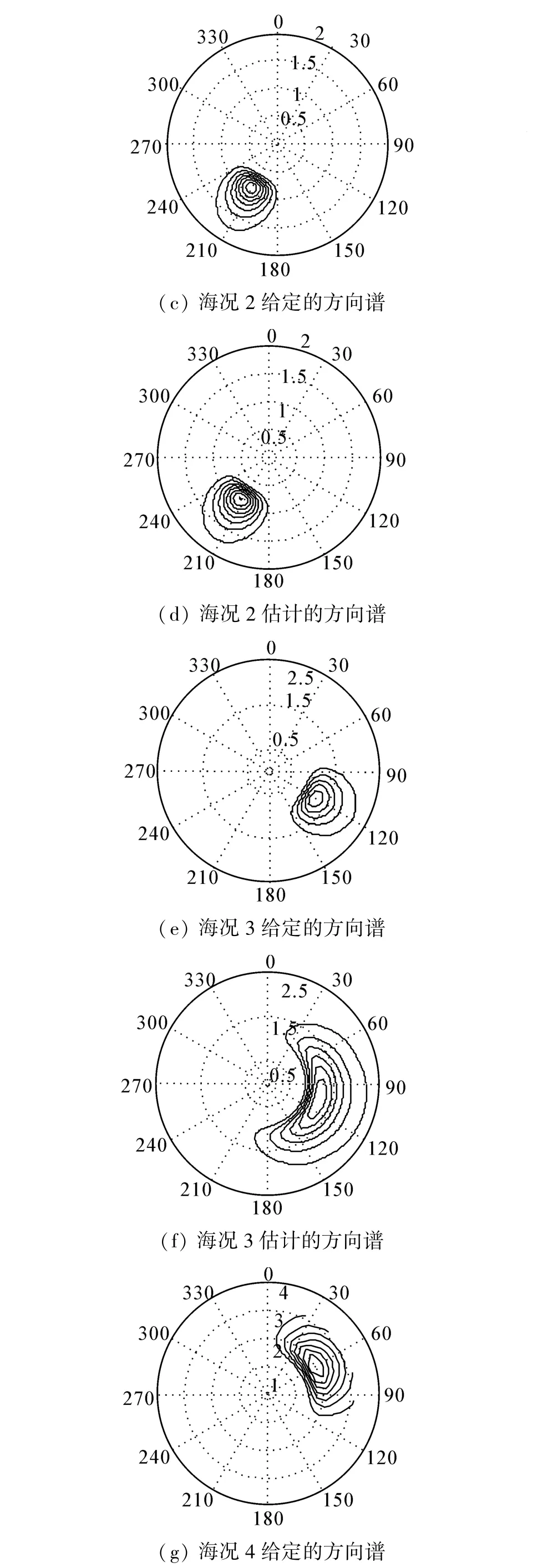
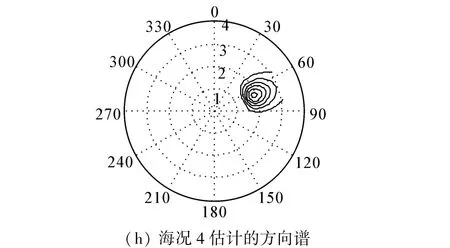
图2 4种海况下的方向谱Fig.2 Directional wave spectra of four sea states
4 结束语
采用多维AR模型方法,从船舶运动数据得到交叉谱,采用自适应遗传算法对海浪谱模型参数进行优化,得到估计海浪方向谱。在仿真实验中对4种不同的海况进行了仿真验证,对估计精度进行了分析和评价。由于船体运动阻尼产生的对波浪的滤波效果,在平静海况时的方向谱估计的精度较低。在高海况时的估计精度较高,高海况这也是该方法应用在船舶运动控制的主要场合。本文对船舶零速状态时的海况估计进行了研究,对于有前进速度的船舶,其遭遇频率和船舶运动响应幅值算子本身会有相应变化,这个问题将作为下一步的研究内容。
[1]周波,石爱国,蔡烽,等.海浪方向谱的数据测量和估计方法[J].舰船科学技术,2005,27(2):46-49.
ZHOU Bo,SHI Aiguo,CAI Feng,et al.Measurement and estimation methods of wave directional spectrum[J].Ship Science and Technology,2005,27(2):46-49.
[2]黄琼,丁虎,黄勇.一种用于海浪方向谱探测的星载微波海洋波谱仪系统[J].制导与引信,2011,32(3):41-52.
HUANG Qiong,DING Hu,HUANG Yong.A spaceborne microwave ocean spectrometer system for detection of directional wave spectra[J].Guidance and Fuze,2011,32(3):41-52.
[3]肖鹏,种劲松.基于拟线性变换的海浪方向谱反演方法研究[J].科学技术与工程,2011,11(17):3899-3902.
XIAO Peng,CHONG Jinsong.On the ocean wave spectrum inversion based on the quasi-linear transform[J].Science Technology and Engineering,2011,11(17):3899-3902.
[4]TAKEKUMA K,TAKAHASHI T.On the evaluation of sea spectra based on the measured ship motions[J].Trans West-Jpn,1973,45:51-57.
[5]TANNURI E A,SPARANO J V,SIMOS A N,et al.Estimating directional wave spectral based on stationary ship motion measurements[J].Applied Ocean Research,2003,23:243-261.
[6]PASCOAL R,GUEDES SOARES C.Ocean wave spectral estimation using vessel wave frequency motions[J].Journal of Offshore Mechanics and Arcitc Engineering,2007,129:90-96.
[7]张文福,谢丹,计静,等.基于AR模型随机海浪的模拟研究[J].低温建筑技术,2012,3:74-76.
ZHANG Wenfu,XIE Dan,JI Jing,et al.Simulation of random wave based on AR model[J].Low Temperature Architecture Technology,2012,3:74-76.
[8]PASCOAL R,GUEDES S C.Non-parametric wave spectral estimation using vessel motion[J].Applied Ocean Research,2008,30(1):46-53.
[9]TOSHIO I,KOHEI O.Bayesian estimation of directional wave spectra based on ship motions[J].Control Engineering Practice,2000,8:215-219.
[10]NIELSEN U D.Estimations of on-site directional wave spectra from measured ship responses[J].Marine Structures,2006,19(1):33-69.
[11]ISEKI T.Extended Bayesian estimation of directional wave spectra[C]//Proceedings of the 23rdInternational Conference on Offshore Mechanics and Arctic Engineering.[S.l.],2004:611-616.
[12]江林,李积德.基于船舶运动信息的航行海域海浪特性预报[J].中国造船,2005,46(3):1-10.
JIANG Lin,LI Jide.The prediction of sea wave characteristics based on ship motion information[J].Shipbiulding of China,2005,46(3):1-10.
[13]谢业海,林孝工,赵大威,等.基于粒子群算法的海浪方向谱估计[J].哈尔滨工程大学学报,2012,33(12):1504-1508.
XIE Yehai,LIN Xiaogong,ZHAO Dawei,et al.Estimating directional wave spectrum based on particle swarm optimization[J].Journal of Harbin Engineering University,2012,33(12):1504-1508.
[14]HARRISON L,PENNY W,FRISTON K.Multivariate autoregressive modeling of FMRI time series[J].Neur Image,2003,19:1477-1491.
[15]NEUMAIER A,SCHNEIDER T.Estimation of parameters and eigenmodes of multivariate autoregressive models[J].ACM Transactions on Mathematical Software,2001,27(1):27-57.
[16]AKAIKE H,NAKAGAWA T.Statistical analysis and control of dynamic systems[M].[S.l.]:KTK Scientific Publishers,1988:104-115.
Research on estimating directional wave spectrum using ship motion
ZHAO Dawei1,DING Fuguang1,XIE Yehai2,HANG Dongdong1,BIAN Xinqian1
(1.College of Automation,Harbin Engineering University,Harbin 150001,China;2.Kunming Shipborne Equipment Research and Test Center,Kunming 650051,China)
Useful information from estimation of the directional wave spectrum of sea can assist the safety of ship and the dynamic positioning control.The traditional wave spectrum estimation method uses wave buoys and other instruments,which cannot be installed on the ships nor used in working ships.This paper researches the wave directional spectrum estimation for dynamically positioning ships,which work at some fixed point.A method of estimating the current wave directional spectrum based on ship motion response data is presented,which uses multivariate AR algorithm to estimate the cross-spectrum of ship motion and uses a genetic algorithm to solve the optimal parameters of wave directional spectrum.A simulation experiment was carried out under four different sea state conditions and the results confirmed the validity of the presented method.
directional wave spectrum;spectrum estimation;multivariate AR;genetic algorithm;ship motion
10.3969/j.issn.1006-7043.201304057
U675
A
1006-7043(2014)10-1219-05
http://www.cnki.net/kcms/doi/10.3969/j.issn.1006-7043.201304057.html
2013-04-18.网络出版时间:2014-09-28.
国家自然科学基金资助项目(51309062);中央高校基本科研业务费专项资金资助项目(HEUCF041402).
赵大威(1974-),男,讲师,博士;
丁福光(1963-),男,教授.
赵大威,E-mail:daweizhao@hrbeu.edu.cn.
