基于超声波传感器阵列的导盲系统设计
2014-06-24李姝颖尹军苌飞霸魏安海周德强
李姝颖,尹军,苌飞霸,魏安海,周德强
第三军医大学大坪医院野战外科研究所医学工程科,重庆 400042
基于超声波传感器阵列的导盲系统设计
李姝颖,尹军,苌飞霸,魏安海,周德强
第三军医大学大坪医院野战外科研究所医学工程科,重庆 400042
目的 设计一种基于超声波传感器阵列的导盲系统,解决视觉受损人群出行不便的困难及行走中的安全问题。方法 以超声波传感器TCT40-16T/R为基础,以AT89S52单片机为控制和数据处理的核心进行硬件设计,采用C语言进行程序设计,采用MATLAB进行软件设计。结果 该系统可以对障碍物进行精确地探测(包括距离和方位),且检测精度高、探测范围广。结论 该系统对解决视觉受损人群出行不便的问题具有重要意义。
超声波传感器;超声波相控阵;导盲系统;C语言;MATLAB
0 前言
据世界卫生组织统计,全世界盲人数量约为4500万,并以每年700万的数量递增,而全世界视觉受损人群数量则多达1.8亿[1]。由于人口老龄化问题,预计到2020年,全球视觉受损人群数量还会增长一倍。据我国卫生部统计,截至到2009年,中国盲人数量约占全球盲人数量的18%,人数约为810万,且该数量有逐年增长之势。人们在生活过程中,有95%的信息是通过视觉获得的,视力受损的后果之一是行动不方便,这会给工作、生活、社交活动带来莫大的困难。如何安全行走是盲人生活中最大的问题。为了解决盲人出行不便的困难,需要设计出不仅能辅助视觉受损人群行走,还能探测周围障碍物的系统。此系统不仅需要满足体积小、功耗低、操作方便、探测范围大等要求,还要能够帮助盲人快速通过复杂环境。
随着科学技术的发展,越来越多的学者开始对超声波测距与定位技术进行研究,尤其是超声波具有在空气中传播不容易受到周围环境干扰、衰减速度慢、非接触式等优点,使得超声波测距与定位技术的应用越来越广泛。为此,深入研究基于超声波传感器阵列的导盲系统具有十分重要的现实意义。
1 超声波相控阵的基本原理
超声波相控阵是指根据一定的规则和时序激发一组超声波传感器,通过调整激发传感器的序列、数量、时间来控制波束形状、偏转角等参数的超声波电子扫查方式[2-3]。它由多个相互独立的超声波传感器组成阵列,通过控制各传感器激励脉冲的时间延迟,来改变由各传感器发射的超声波到达物体某点时的相位关系,使各个传感器发射的超声波叠加后形成一个新波阵面;当超声波相控阵发射的波束遇到目标以后就会反射回波,回波到达各传感器的时间存在差异,按照回波到达各传感器的时间对每个接收信号作延时补偿,并进行合成相加,再根据信号处理的结果判断障碍物的位置。超声波相控阵接收的回波信号来自于多个通道信号,合理利用每个通道之间回波信号的时间差与相位差是对物体定位的基础。超声波相控阵技术有以下特点:① 电子系统控制波束特征,可在无需或少移动阵列的情况下实现自动扫查,检测速度快且能够探测复杂形状的物体;② 能实现多角度、多波束检测;③ 原始数据丰富,便于二次分析,可用成像方式显示障碍物;④ 有利于波束方向的控制,在分辨力、信噪比等方面具有优越性;⑤ 超声波相控阵的快速扫描避免了机械扫描时附带的波束偏转惯性,提高了扫描精度;⑥ 超声波相控阵波束形状的捷变能力强。采用超声波相控阵技术可在不移动传感器阵列的情况下,实现对空间中障碍物的立体扫描。
2 系统总体设计
基于超声波传感器阵列的导盲系统探测原理是以不同角度发射超声波束来扫描环境,并接收障碍物的反射回波[4-7]。该设计由两组分立的线性发射阵列和接收阵列组成,其中发射阵列由4个超声波传感器组成,接收阵列由3个超声波传感器构成。如果发射阵列与接收阵列中的传感器以相同距离2.5λ或3.75λ排列,则整个系统只有在45°或30°扫描范围内探测才不会出现由栅瓣造成的误判。本研究选用的TCT40-16T/R压电陶瓷超声波传感器具有收发分立式超声探头,其中心频率为40 kHz[8-9],方向角为80°左右。为了消除栅瓣的影响和减小伪像,发射阵列和接收阵列的超声波传感器分别以2.5λ和3.75λ间距排列,通过波形乘积法可以使整个系统的扫描范围到达60°。发射阵列和接收阵列都使用相位波束合成技术,利用电子技术控制波束扫查后形成扇形扫描直接探测对象,用该种方法可以有效地扩大探测面积。
2.1 硬件设计
导盲系统的硬件设计以超声波传感器TCT40-16T/R为基础,以AT89S52单片机作为控制和数据处理的核心,由电源、超声波发射模块、超声波接收模块、模拟开关电路、A/D模数转换电路以及数据通讯模块构成。系统硬件结构框图,见图1。
如图1所示,该导盲系统的工作原理是在整个系统发射超声波前,由单片机产生频率为40 kHz的脉冲信号,然后将脉冲信号传至发射模块进行放大,再用放大后的信号来驱动超声波阵列发射超声波;当超声波在空气中遇到障碍物时,就会反射回波;当超声波阵列接收到微弱的回波信号时,阵列则利用压电效应将回波信号转换成微弱的电信号,然后将信号送至模拟开关电路选择接收通道,通过接收模块对信号进行处理后把接收模块输出的模拟信号送至A/D转换电路进行模数转换;最后把处理后的数字信号传送到单片机中,通过CH341T芯片与PC机USB端口相连接,实现单片机与PC机之间的数据传输。
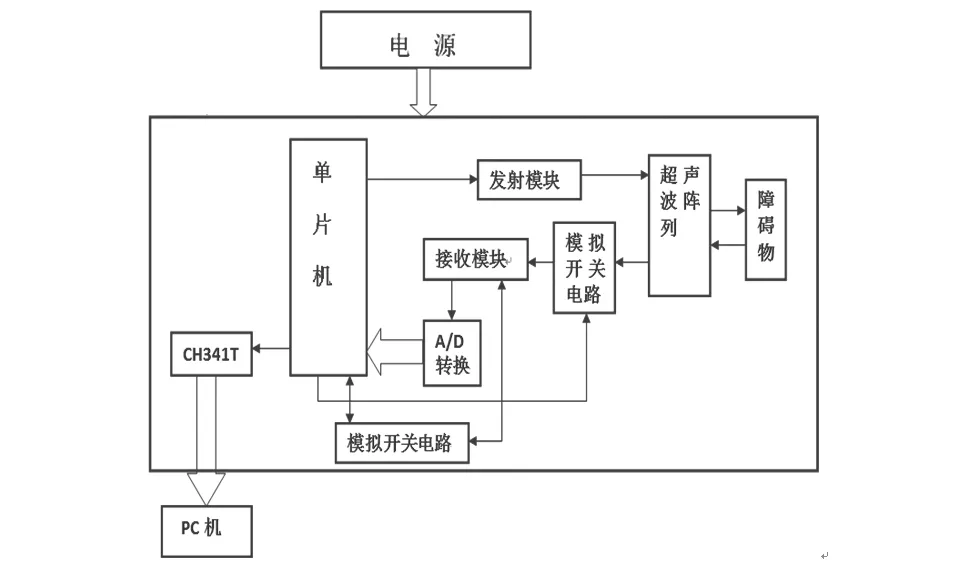
图1 导盲系统硬件结构框图
2.1.1 发射模块
发射模块以MAXIM公司的MAX232芯片为核心构成电压抬升电路,其作用是将驱动超声波传感器的脉冲电压进行放大。当遇到距离较远的障碍物时,回波信号较弱,仅为微伏级或毫伏级别,要使系统检测范围更远,就需要加上电压抬升电路以增强其驱动能力。
2.1.2 接收模块
接收模块包括放大电路、滤波电路、比较电路以及整流电路。接收模块主要是对微弱的回波信号进行放大和滤波,然后将处理后的信号传输到比较电路,经过阈值比较后再送至整流电路对信号进行整形放大,最后通过模拟开关电路选择接收通道。
由于超声波传感器接收的回波电压值较小(仅为毫伏级),不易测量,需要放大电路将回波信号增大到适当的范围,再送至滤波电路进行处理。本设计采用LM324运算放大器来实现放大功能,其放大倍数为47倍。在超声波传感器所检测到的信号中,除了碰到物体而反射回来的信号以外,还容易掺杂其他干扰信号,因此,需要采用带通滤波电路把有效信号滤出,选择适当的通带宽度则是带通滤波电路的关键步骤。
回波信号经过放大、滤波后发送到比较电路,与电路中设置的阈值进行比较。当输入电压比阈值电压高时,表明已成功检测到物体反射回来的信号。如果设置的阈值电压过低,其他干扰信号同样能触发比较电路;如果设置的阈值电压过高,微弱的回波信号就不能引起比较电路的输出。本论文采用双阈值法在一定距离内检测可以获得精确度较高的数据。比较电路图,见图2。
本设计采用高性能模数转换芯片MAX197进行A/D模数转换电路设计,以及使用CH341T芯片将USB与AT89S52单片机UART连接起来,完成USB转串口设计。数据通讯电路图,见图3。
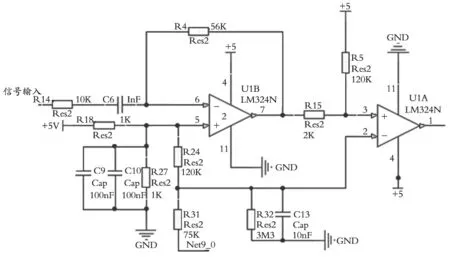
图2 比较电路图
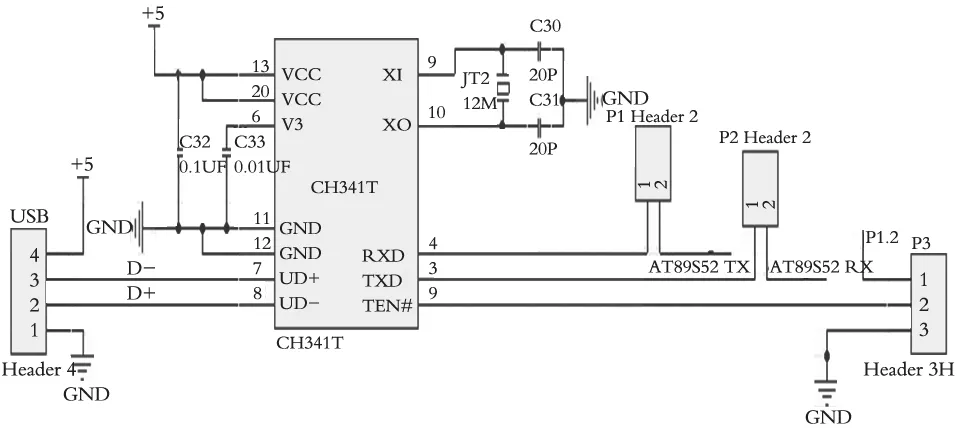
图3 基于CH341的USB数据通讯电路图
2.2 软件设计
2.2.1 基于C语言的程序设计
采用C语言设计的程序负责及时处理回波信号,实现相关运算以及数据通讯。这一部分主要由超声波发送子程序、中断子程序、超声波接收子程序、A/D采样程序和通讯程序组成,其流程图见图4。
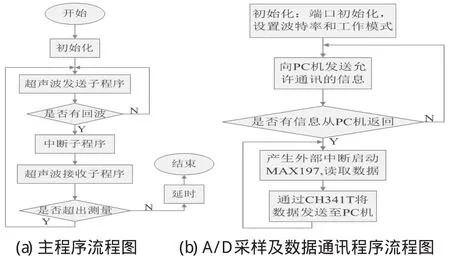
图4 程序流程图
如图4(a)所示,首先系统进行初始化,再分别对定时器、中断系统及其他参数进行设置,然后激励传感器发出8个周期40 kHz的脉冲超声波;同时打开定时器计时。由于发射超声波过程中将有余波形成,并且超声波传感器之间的距离非常近,发射时会有部分余波未经反射直接回到接收通道引起系统误差。为了避免误差,在发射超声波后延迟启动接收电路。若接收到回波,则引起外部中断,调用中断子程序读取计数值,经处理后计算出从发射到接收的时间差,即可得到障碍物信息。如图4(b)所示,设置通讯波特率为11.52 kbps,数据传输采用外部中断方式,每当MAX197完成一次数据转换,就先将数据放在AT89S52单片机里缓存,然后通过CH341T发送至PC机中。
2.2.2 基于MATLAB的软件设计
采用MATLAB设计的软件负责对数据的接收和处理进行编程,用于分析AT89S52单片机传输的数据。MATLAB串口通讯及数据处理流程图,见图5。
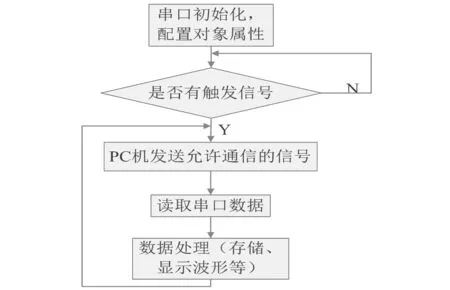
图5 MATLAB串口通讯及数据处理流程图
3 实验结果
本设计分别对放置在不同位置上各种形状的物体进行测量实验。波形乘积法使得整个系统的波束方向性可以通过发射阵列和接收阵列的方向乘积得到[8-9],所得整个系统的阵列波束扫描范围可达到60°,大大提高了探测范围。图6(a)为偏转角θ=20°时发射阵列波束方向图。

图6 波束方向图
从图6(a)中可以看出,第一栅瓣出现在大约-5°和50°位置处。为了得到接收阵列的波束方向,将一个超声波传感器发射探头放置在接收阵列前发出超声波,而接收阵列中所有超声波传感器同时检测回波。图6(b)为波束偏转角θ=20°时接收阵列波束方向图。从图6(b)中可以看出,第一栅瓣出现在大约5°和40°位置处。已知发射阵列和接收阵列的波束指向图,根据波形乘积法能够获得整个系统的波束方向图。当波束偏转角θ=20°时,整个系统的波束方向是发射阵列与接收阵列波束方向之乘积。通过实验证明,在扫描范围内波形乘积法可行并且能成功地消除栅瓣影响,使检测精度得到极大的提高。
通过实验对导盲系统波束方向进行定性分析后,还需要对不同位置上各种形状的物体完成探测实验。首先,对单个形状规则的物体进行实验1。实验中将一个长度约为15 cm的物体放置在离装置160 cm处的位置,它与装置夹角为-14°。如果接收阵列和发射阵列都使用2.5λ传感器间距,则波束偏转角为-14°,栅瓣出现在扫描范围内-9°和-44°角的地方。这将导致在扫描范围-9°和-44°角的地方出现物体伪像。测试结果见图7(a),实验结果中没有物体伪像。因此,实验证明本文设计方法能成功地抵消栅瓣影响。
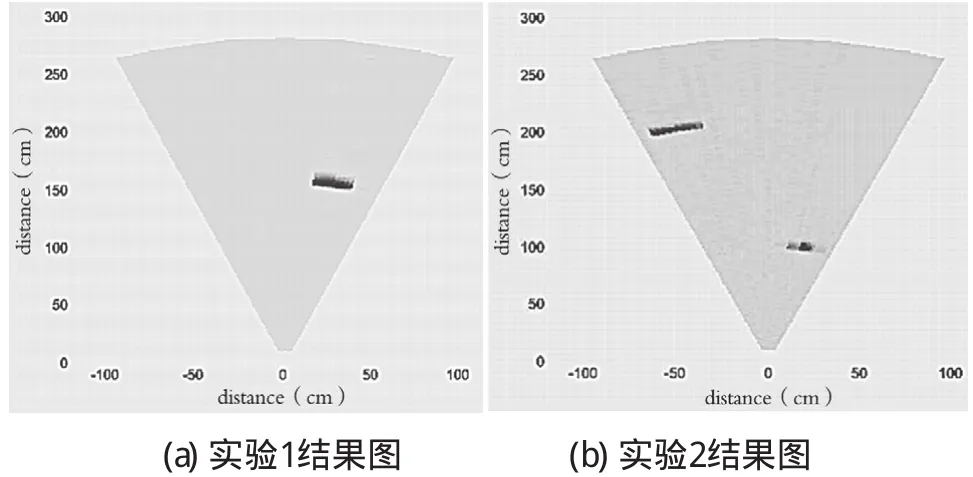
图7 探测测试结果
然后,对多个形状规则的物体进行探测实验。实验2中,使用两个大小不同的物体,其中一个长度约为15 cm的物体被放置在距离装置100 cm处位置,并且使物体与装置夹角为-13°;另一个大小约为35 cm的物体放置在距离装置200 cm处位置,与装置的夹角为17°。测试结果见图7(b),实验成功地检测到了这两个物体,而且很容易地将不同障碍物区别出来。实验结果证明,距离在100 cm处的物体大小约为18 cm,比实际物体要大,而这个误差值在系统的角分辨率范围内,在这种情况下图像中仍然不存在伪像。通过对多组实验所得结果进行综合分析,可以看出,该导盲系统可以对障碍物进行较为精确地探测(包括距离和方位),其测量误差在允许范围内浮动。
4 结论
基于超声波传感器阵列的导盲系统研究的创新点在于针对现有导盲系统存在的问题提出了一种新的设计思路,将医学检测和军事上应用的超声波相控阵经过改进后使用到导盲系统中。该系统采用逐个轮流激励超声波传感器发射探头的方式发送超声波,避免了超声波串扰的问题,提高了整个系统的检测精度;使用超声波传感器接收探头同时进行回波检测,增加了数据采集量,可提供大量多角度的障碍物信息。与传统导盲系统相比,该系统性能从检测精度、检测方式、便携性等方面都得到了很大提高,具有非常大的现实意义。
[1] 大风过后的思考[EB/OL].[2002-10-11][2014-07-03]. http://www.chinamil.com.cn/gb/pladaily/2002/10/11/ 20021011001138_it.html#.
[2] 施克仁,郭寓岷.相控阵超声成像检测[M].北京:高等教育出版社,2010.
[3] 史亦韦.超声检测[M].北京:机械工业出版社,2005.
[4] Shraga Shoval,Johann Borenstein,Yoram Koren.The NavBelt-a computerized travel aid for the blind based on mobile roboticstechnology[J].IEEE Transactions on biomedical engineering,1998,45(11):1376-1385.
[5] 刘钦,张凤生,刘大维.基于超声波传感器阵列的障碍物位置计算方法研究[J].青岛大学学报(工程技术版),2005,20(2):75-79.
[6] 孟详薇,严锡君,欧阳星辰,等.基于超声波传感器的导盲杖设计[J].电子设计工程,2012,20(17):11-14.
[7] Iwan Ulrich,Johann Borenstein.The guidecane-applying mobile robot technologies to assist the visually impaired[J].IEEE Transactions on systems,man,and cybernetics-part A:systems and humans,2001,31(2):131-136.
[8] 胡志南.超声相控阵检测与成像技术的研究[D].广州:华南理工大学,2013.
[9] 潘仲明,贺汉根.超声阵列障碍探测技术及其在无人车辆中的应用[J].国防科技大学学报,2009,31(2):121-125.
Design of Guide System Based on Ultrasonic Sensor Array
LI Shu-ying, YIN Jun, CHANG Fei-ba, WEI An-hai, ZHOU De-qiang
Department of Medical Engineering, Daping Hospital, Research Institute of Surgery of Third Military Medical University, Chongqing 400042, China
Objective To design a guide system based on ultrasonic sensor array to solve the inconvenience and safety problems for the travel of people with visual impairment. Methods Based on the ultrasonic sensor TCT40-16T/R, the hardware of the system was designed with single-chip microcomputer AT89S52 as its control and data processing core. C language was used to design the program of the system and MATLAB was used to design the software of the system. Results The system can detect obstacles accurately (including distance and direction), and enjoys the advantages of high detection accuracy and wide detection range. Conclusion The system will play an important role in solving the travel difficulties for people with visual impairment.
ultrasonic sensor; ultrasonic phased array; guide system; C language; MATLAB
TP212.3
A
10.3969/j.issn.1674-1633.2014.10.008
1674-1633(2014)10-0028-04
2014-07-03
2014-08-01
尹军,高级工程师,医学工程科主任。
作者邮箱:1126978264@qq.com