并联混合动力汽车传动系速比优化
2014-06-07高建平乔宏冰郗建国赵金宝
高建平,乔宏冰,郗建国,葛 坚,赵金宝
(河南科技大学车辆与交通工程学院,河南 洛阳 471003)
并联混合动力汽车传动系速比优化
高建平,乔宏冰,郗建国,葛 坚,赵金宝
(河南科技大学车辆与交通工程学院,河南 洛阳 471003)
为了进一步提高混合动力汽车燃油经济性,使用仿真软件Cruise建立整车性能仿真模型,并集成到优化平台Isight软件中,对传动系速比参数进行优化和匹配。为了提高优化速度,建立了响应面近似模型作为优化时的代理模型,并利用Isight软件中的多岛遗传算法和序列二次规划算法建立组合优化算法。研究结果表明:优化后在满足整车动力性设计指标的前提下,循环工况下的百公里综合油耗降低了7.20%,优化速度提高了30倍。
混合动力汽车;传动系速比;响应面近似模型;组合优化算法
0 引言
在混合动力汽车动力源确定的条件下,混合动力汽车传动系对整车的动力性和燃油经济性有重要影响。优化混合动力汽车传动系参数,是在保证整车动力性能设计指标的前提下降低整车的燃油消耗的一个重要途径。传统的优化模型多建立在理想的整车数学模型基础之上,没有考虑汽车实际行驶中各种条件变化,是一种理想近似,如复合型法、模糊优化法;用Advisor建立混合动力汽车仿真模型,基于Matlab优化工具箱进行优化多采用遗传算法,但遗传算法效率低、精度不高且消耗时间长[1-3]。
在Cruise软件中建立整车性能仿真模型,然后利用Isight进行确定性优化,将Cruise软件集成到Isight软件环境下运行,由于Isight软件能够在运行中自动调用Cruise软件,并改写Cruise软件中的参数,同时也可读取输出文件中的计算结果数据,因而保证优化过程自动运行。为提高优化速度,本文建立了Cruise整车性能仿真模型的响应面近似模型作为优化时的代理模型,并利用Isight软件中的多岛遗传算法(MIGA)加序列二次规划算法(NLPQL)的优化算法,对混合动力汽车的传动系速比参数进行优化。
1 混合动力汽车仿真模型
Cruise软件所计算模块都经过实验数据的标定,仿真结果更接近于真实情况。因此,可以基于Cruise建立混合动力汽车的整车性能仿真模型,进行相关动力性和经济性的仿真计算[4-9],根据混合动力汽车动力总成的的结构特点,在Cruise中建立了该车的动态分析模型,其结构如图1所示。混合动力汽车为双离合单轴并联结构,包括发动机、电机、动力电池、电磁离合器和半轴等。发动机通过自动离合器1与驱动电机连接,电机经过电磁离合器2直接与变速器相连,然后动力由主减半轴传递到车轮上。
动力电池与电机相连,实现电量的冲放。该系统中电机既是动力驱动装置,又是起动、发电一体化系统。通常情况下电磁离合器2做闭合状态。当电磁离合器1断开时,由电机单独驱动车辆运行;当电磁离合器1结合时,电机和发动机可以同时驱动车辆运行。
根据此车辆动力系统的布置要求,该车辆所应该具有的工作模式有怠速停机、纯电动起步、发动机单独驱动模式、行车充电模式、混合动力模式、制动回馈模式和滑行回馈等模式[10-15]。

图1 混合动力汽车结构示意图
由于目标函数高度非线性,不连续且不可微,且设计空间是非线性的,很难了解设计空间的形状,单独使用遗传算法进行全局探索,所消耗时间长,单次仿真的时间大约3 min,一个优化过程需要3 600组仿真计算,大约需要7.5 d,不利于工程应用,况且遗传算法精度较差,因此,需要建立Cruise仿真模型的最小二乘响应面近似模型,并以之作为代理模型进行优化,缩短优化仿真时间。
2 优化模型建立
2.1 设计变量
混合动力汽车传动系参数优化的目的是在满足动力性设计指标的基础之上,尽量使经济性有很大改善。变速器和主减速器的速比均影响整车的动力性和燃油经济性,故选取变速器各档位速比和主减速器速比等参数作为优化的设计变量[8]。设计变量可表示为:

式中,X为优化设计变量的向量;igj为变速器第j挡的速比(j=1,2,3,4,5);i0为主减速器速比。
2.2 目标函数
混合动力汽车燃油经济性常用循环工况下的百公里综合燃油消耗量来衡量,用Q来表示,优化目标表述如下:

式中,Obj为目标函数;Q为中国典型公交车循环工况下百公里综合燃油消耗量。
2.3 约束条件
在提高混合动力汽车燃油经济性的同时,还必须满足各种动力性能设计指标要求,包括最高车速、最大爬坡度、加速时间、变速器速比约束等。
(Ⅰ)最高车速要求

式中,vmax为设计指标的最大车速;nmax为传动系的最高转速;r为车轮的滚动半径。
(Ⅱ)最大爬坡度要求

式中,G为整车质量;f为车轮滚动阻力系数;αmax为最大爬坡度;ηt为传动系总效率;Tmax为电机最大扭矩。
(Ⅲ)加速时间要求
所选优化传动比要校验满足0~50 km/h加速时间t要求,t≤24 s。
(Ⅳ)变速器速比约束
按照汽车理论,传动系中各挡传动比大致按等比级数排列,但为了改善汽车的动力性和经济性,一般采用偏置等比级数的方法,适当减小相邻挡位之间的传动比值,表述如下:

(Ⅴ)为防止动力传递中断或发动机熄火,可以使用下面的约束条件:

式中,ign为第n挡的传动比(n=1,2,3,4);nmin为发动机最低转速。
3 响应面近似模型
3.1 响应面近似方法
构建响应面近似模型(RSM),是实验设计与数理统计相结合处理多变量建模与分析的一种统计方法。其原理是利用实验设计采得的样本点数据拟合出设计变量和目标函数之间的近似函数关系[9-12]。一般采用最高二次多项式的基函数进行拟合,表述如下:

式中,y为真实的响应;x为设计变量;a为多项式各项的系数;ε为随机误差;n为设计变量的个数。
其中,多项式各项系数A=[a0,a1,a2,…,am]T(m为基函数的个数)使用最小二乘法得到,即:

若上式有解,样本点数必须大于等于基函数个数m。本问题中设计变量数n=6,基函数个数为保证RSM的精度,通常采样点数大于基函数的2倍或3倍,因此,使用优化拉丁方抽样法,在设计变量的设计空间内抽取189个样本点,得到样本S189×6,然后,使用Cruise计算每个样本点处的混合动力汽车循环工况百公里综合油耗Q和0~50 km/h加速时间t,根据样本和响应得到Cruise的响应面近似模型,即:

式中,f1、f2为多项式函数。
3.2 响应面近似模型的精度评价
通过采样点的响应值和预测值之间的线性相关程度和相对误差来评价近似响应面模型的精度。统计学中常用决定系数R2和调整决定系数R2a来评价响应值和预测值之间的线性相关程度。决定系数R2和调整决定系数R2a定义如下:

式中,yi为真实响应;y^为预测值为真实响应的均值;m为基函数的个数;N为采样点数。
R2越接近1,说明近似响应面模型近似逼近程度越高,但这并不意味着响应面模型一定是好的模型。因为响应面模型的项数增加时逐渐增大趋近于1,因此,引入调整决定系数以避免错误的判断。当和相差较大时,说明响应面模型中存在多余项。表1为决定系数和调整决定系数,从表1中可以看出循环工况百公里油耗Q和0~50 km/h加速时间t的精度。工程上,大于0.9即认为近似模型精度达到要求,当和差值小于0.02时,认为此近似模型可用。
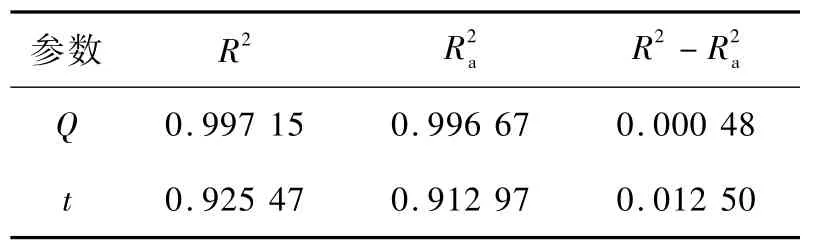
表1 决定系数和调整决定系数
4 组合优化算法
数值型优化技术可以快速地找到局部最优点,但是不能很好地进行全局寻优;探索型优化技术可以找到全局最优点,但是后期效率较低,局部寻优不佳。因此,把这两种技术组合在一起构成组合优化技术,通过全局探索把最优点定位到局部区域,再通过数值型优化技术找到最优点,充分利用两种优化算法的优点,加快优化速度[13]。
为了在设计空间内进行全局寻优,必须使用一种全局性优化方法。多岛遗传算法(MIGA)是Isight软件中自带的一种全局寻优的探索性优化方法,把种群分成几个岛,每一个岛相当于一个“小生境”,在各个岛上分别进行遗传算法计算,提高种群多样性,提高全局搜索能力,提高收敛性,基本流程如图2所示。
每个子种群通过传统的遗传算法和个体时,随时从一个子种群迁移到另一个子种群而发展成为下一代。
序列二次规划法(NLPQL)是局部优化的数值型优化算法,用来解决带有约束的非线性数学规划问题,并假设目标函数和约束条件是连续可微的。二次连续规划法(SQP)是NLPQL的核心算法。将目标函数以二阶泰勒级数展开,并把约束条件线性化,原非线性问题就转化为一个二次规划问题,通过解二次规划得到下一个设计点。然后根据两个可供选择的优化函数执行一次线性搜索,其中Hessian矩阵由BFGS公式更新,该算法很稳定,是Isight中自带的局部优化收敛速度最快的一种算法,最主要的优点是很容易和一个非常健壮的算法一起使用。
正是由于上述两种优化算法能够相互弥补各自的优点,使用多岛遗传算法与连续二次规划法组合成一种组合优化算法来对传动系速比进行寻优,进一步缩短优化时间。
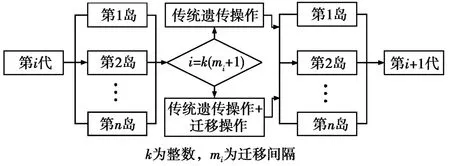
图2 多岛遗传算法相邻两代之间的进化流程图
5 优化结果与分析
Isight优化是一个反复迭代的过程,经过多次迭代,目标值越来越趋于稳定。图3为混合动力汽车在中国典型公交车循环工况下的综合百公里油耗寻优过程,图4为中国城市公交循环工况跟踪图,表2列出了优化前后混合动力汽车各挡速比以及燃油经济性的对比。
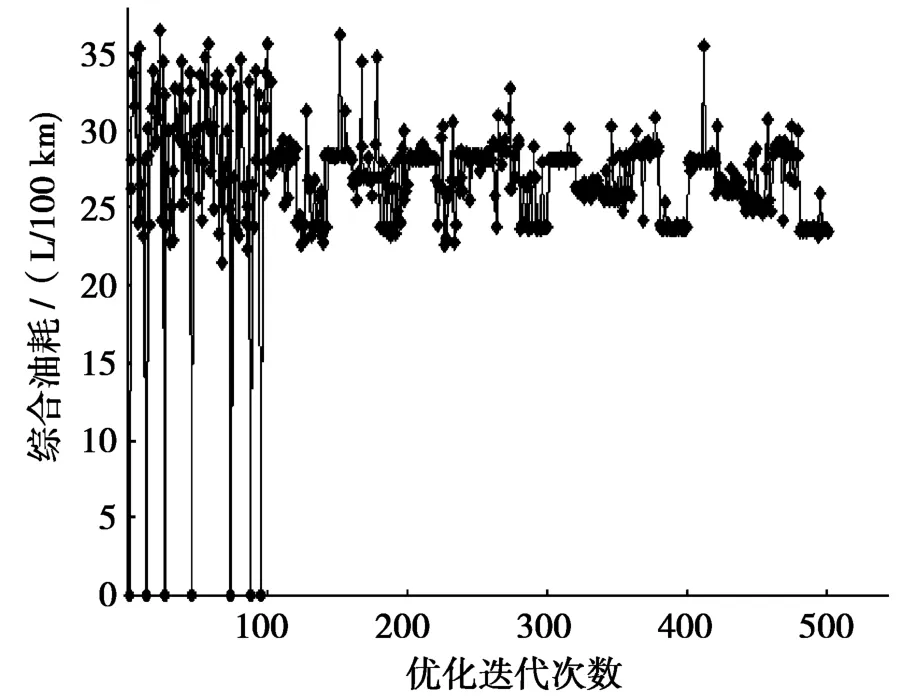
图3 循环工况综合百公里油耗寻优过程

图4 中国城市循环工况跟踪情况
研究结果表明:传动系比和主减速比对燃油经济性有显著影响。从图4可以看出:传动系速比经过优化后,混合动力汽车对于中国城市循环工况有良好的适应性。从表2可以看出:优化后的传动系速比整体减小,最大爬坡度和加速性能等动力性都有一定的损失,但都在设计指标的范围之内;而优化后的循环工况电耗和油耗等经济性都有明显的改善,循环工况的综合油耗降低7.20%。经过建立响应面近似模型和使用组合优化算法,优化仿真时间从原来180 h缩短到6 h,优化速度提高了30倍。

表2 优化前后结果对比
考虑到工程方案的复杂性,本文未对优化结果与配齿结果作进一步对比分析。
6 结论
(1)使用Isight优化软件集成Cruise进行并联混合动力汽车速比优化,在保证动力性设计指标前提下,循环工况综合油耗降低了7.20%。
(2)通过建立Cruise整车性能仿真模型的响应面近似模型,可以对优化问题作有效的简化;使用多岛遗传算法和序列二次规划算法相结合的组合优化算法,大大缩短了优化仿真时间。
[1] 胡先锋.并联式混合动力汽车传动系参数优化[J].汽车工程师,2009(5):27-30.
[2] 钱立军,吴伟岸,赵韩,等.混合动力汽车传动系优化匹配[J].农业机械学报,2005,36(9):5-8.
[3] 雷嗣军,宋小文.遗传算法与ADVISOR联合优化仿真汽车动力传动系统[J].机械科学与技术,2010,29(9):1137-1141.
[4] 王庆年,于永涛,曾小华,等.基于CRUISE软件的混合动力汽车正向仿真平台的开发[J].吉林大学学报:工学版,2009,39(6):1413-1419.
[5] Zhou Y Q,Han C L,Wang X D,et al.Research on Power Train Source Matching for Single-axle PHEV[C]//IEEE Vehicle Power and Propulsion Conference(VPPC).United States:Inst of Elec and Elec Eng Computer Society,2008.
[6] 高建平,李晓林,杨博.混合动力汽车工况聚类分析与模糊控制策略[J].河南科技大学学报:自然科学版,2012,33(4):19-22,27.
[7] 曾小华,王庆年,王伟华,等.正交优化设计理论在混合动力汽车设计中的应用[J].农业机械学报,2006,37(5):26-28.
[8] 高建平,李晓林,郭志军.改进型混合动力汽车工况预测算法的应用仿真[J].河南科技大学学报:自然科学版,2013,34(2):34-38.
[9] 孙鹏龙,付主木,王周忠.并联式混合动力汽车再生制动控制策略[J].河南科技大学学报:自然科学版,2013,34(3):35-39.
[10] 余志生.汽车理论[M].北京:机械工业出版社,2006.
[11] 赵韩,代康伟,张炳力,等.基于正交实验方法的SHEB动力系统参数优化[J].合肥工业大学学报:自然科学版,2008,31(3):323-326.
[12] Wang B H,Jin Y,Luo Y G.Parametric Optimization of EQ6110HEV Hybrid Electric Bus Based on Orthogonal Experiment Design[J].International Journal of Automotive Technology,2010,11(1):119-125.
[13] 邓乃上,方宗德,朱艳香,等.基于响应面模型的汽车传动系参数多目标优化[J].机械科学与技术,2011,30(9):1569-1572,1578.
[14] Raissi S.Statistical Process Optimization Through Multi-response Surface Methodology[J].World Academy of Science,Engineering and Technology,2009,51:267-271.
[15] 詹樟松,杨正军,刘兴春,等.汽车动力传动系统参数优化设计和匹配研究[J].汽车技术,2007(3):17-20.
U469.72
A
1672-6871(2014)06-0025-05
国家“十二五”863计划基金项目(2012AA111603)
高建平(1970-),男,河南洛阳人,副教授,博士,主要研究方向为新能源汽车.
2013-12-04
