一种空间遥感器反射镜柔性支撑结构
2014-06-07张军
张 军
(中国科学院长春光学精密机械与物理研究所,吉林长春 130033)
一种空间遥感器反射镜柔性支撑结构
张 军
(中国科学院长春光学精密机械与物理研究所,吉林长春 130033)
设计了刚度高、热适应强的反射镜柔性支撑结构。通过有限元模型分析,该支撑结构中的反射镜在±10℃的环境温度变化下,其反射镜面形精度RMS值达到1/50λ(λ=632.8nm)。
反射镜;柔性支撑;成像质量
0 引 言
1 反射镜支撑结构设计
1.1 反射镜支撑结构
按照反射镜的支撑位置,可以分为中心支撑、周边环形支撑、侧面支撑、背部多点支撑等形式,如图1所示。

图1 反射镜支撑方式示意图
对于光轴垂直放置的反射镜,可以采用周边环形支撑。这种支撑方式一般是在反射镜的边缘附近施加一个连续的面接触,接触表面要求的精度很高。这种支撑方式下,反射镜中心受自身重力影响发生的变形量一般最大。
侧边支撑和周边环形支撑一般都不单独应用于空间反射镜支撑,因为这两种支撑方式都要依靠重力的作用。空间用反射镜需要满足变方位安装要求,即当重力作用方向变化时,反射镜都能满足使用要求。
背部多点支撑是指在光学反射镜的背部为定位基准的支撑方式。这种支撑方式是反射镜变方位安装最常见的一种形式,通常在反射镜背部特定的位置加工出一定数量和深度的盲孔,采用胶结的方式将反射镜与柔性支撑单元连接起来,然后连接到支撑背板上。背部三点支撑由于采用了柔性支撑单元,可消除由装配和温度变化产生的结构应力[3]。
因此,我们可选择背部三点支撑形式,除此之外,还可以采用基于半运动学定位原理的复合支撑方式,即背部三点支撑和侧面两点辅助支撑。
1.2 反射镜组件结构
4.2 生态效益 金花茶是常绿灌木至小乔木,通过项目建设利于保持水土、涵养水源、调节气候、生态环境保护。紫檀树内含根瘤菌,可以固氮保水、改良土壤结构、提高地力,项目实施不但对周围环境没有污染,而且提高森林质量和覆盖率,对改善当地小气候具有促进作用。
反射镜组件由反射镜、柔性支撑单元、支撑背板组成,支撑背板是联接在反射镜柔性支撑单元和相机整体框架之间的结构,支撑背板围绕反射镜支撑点的位置展开,它是给反射镜的支撑点提供稳定的支撑平台[4],支撑背板是反射镜组件中一个非常重要的结构件,为避免过约束引入装配应力,支撑背板与反射镜的联接通过柔性支撑单元,采用三点式联接方式,如图2所示。

图2 反射镜支撑结构
柔性支撑单元是反射镜组件的重要环节,它不但可以隔震,消除部分装配应力,同时可以吸收温度变化下材料热特性不匹配产生的能量,考虑到力学环境和温度环境对结构的影响,使结构具有一定的缓冲作用[5],柔性支撑单元由芯轴、柔节、轴套组成,如图3所示。
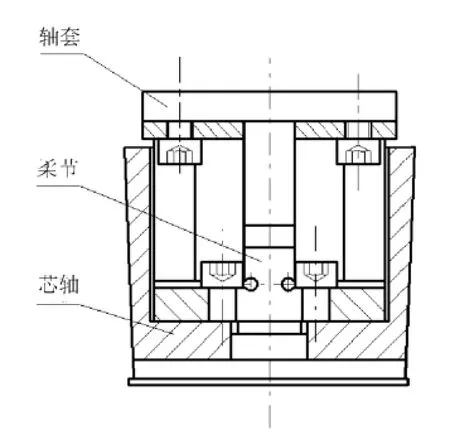
图3 柔性支撑单元
在反射镜三点连接口处各粘接一轴套,通过螺钉将芯轴固定在支撑背板三点连接处,将柔节与芯轴和轴套联接,形成柔性支撑单元。
合理的材料选取可以尽量减少材料热特性不匹配带来的影响,反射镜选择SiC材料制作。选择与SiC材料线胀系数相近的铟钢作为反射镜背部支撑孔与支撑结构相连接的镶嵌件,支撑结构件选择高比刚度、高强度、低密度且加工工艺成熟的钛合金制作,与支撑结构件相连的背部支撑背板则采用高比刚度、低线胀系数的高体份SiC/Al复合材料制作,具体材料属性见表1。

表1 各部件材料属性
2 柔性支撑单元参数优化
通过对柔性铰链变形区主要参数的优化,不仅能够消除反射镜支撑系统在温度变化时对面形精度的影响,而且可以避免在联接和装配当中产生的应力造成反射镜面形下降。
单轴柔性铰链的切口截面为矩形,如图4所示。
柔性铰链的基本性能包括刚度、精度及应力特性等。其中,刚度特性直接反映了柔性铰链抵抗外部载荷的能力,同时也体现了铰链的柔性程度,因此,柔性铰链在最小厚度t、切割圆半径r、宽度b、高度h几何尺寸都需要分析计算确定[6]。


图4 柔性铰链界面刚度
单轴柔性铰链的转角刚度计算公式为:

t——最薄处厚度;ρ=r/t。
通过计算分别求得R=1mm,R=1.5mm,R=2mm时,对应t=0.1~2.5mm的转角刚度,以t为横坐标,转角刚度值为纵坐标,它们之间的关系曲线如图5所示。

图5 柔性铰链转角刚度对t的变化曲线
从图5中可以看出,t值的大小对柔性铰链的转角刚度影响较大,随着t值的增加,转角刚度呈二次曲线增加,而R值增加,转角刚度减小,根据结构的要求确定柔性铰链的R值大小,再选择合适的t值,以保证柔性铰链具有合适的转角刚度和位移刚度,在柔性支撑单元结构设计中,初步选取R=1.0,t=2。
3 反射镜组件有限元分析
模拟反射镜组件约束时,将反射镜组件固定在一块可自由膨胀的基板上[7]进行静态分析,如图6所示。

图6 反射镜组件网格划分
反射镜组件变形云图如图7所示。
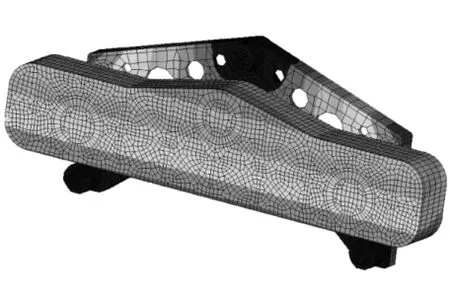
图7 反射镜组件变形云图
反射镜自重变形引起的位置及面形误差见表2。

表2 反射镜自重变形引起的位置及面形误差
反射镜10℃均匀温升加上自重变形引起的位置及面形误差见表3。

表3 10℃均匀温升加上自重变形引起的位置及面形误差
反射镜10℃均匀温降加上自重变形引起的位置及面形误差见表4。

表4 10℃均匀温降加上自重变形引起的位置及面形误差
分析结果表明,反射镜支撑背板结构优化后,反射镜在10℃均匀温降加上自重变形的工况下,最大偏转角3.41″(X轴),同样最大刚体位移6.69μm(X轴),从数据中可以发现,优化后反射镜在3个不同工况下面形误差均在设计范围内,
能够满足设计要求。
4 反射镜面形检测结果
在室温20℃时,用Zygo干涉仪对反射镜组件进行面形检测,如图8所示。

图8 Zygo干涉仪对反射镜组件进行面形检测
反射镜有效口径面形误差如图9所示。

图9 反射镜有效口径面形误差
检测结果显示,检测RMS值为0.017,其面形精度RMS值达到λ/50(λ=632.8nm),说明镜面面形精度受重力影响非常小,而且面形分布也比较均匀,没有明显的因支撑结构带来形变。
5 结 语
对反射镜支撑结构进行了优化设计,论述了柔性铰链参数的设计方法,进行反射镜柔性支撑单元设计,完成了反射镜支撑结构的静态有限元分析,并在计算机仿真分析结果的指导下,对反射镜支撑结构进行优化设计,提高结构的温度适应能力,提高了反射镜的面形精度,对空间遥感器反射镜支撑结构设计起到了一定的指导作用。
[1]吴清文.镜面面形误差的曲面方程处理方法[J].光学精密工程,1998,6(6):56-60.
[2]曾勇强,博丹鹰,孙纪文,等.空间遥感器大口径反射镜支撑结构综述[J].航天返回与遥感,2006,27(2):22-26.
[3]王永宪.基于有限元法的空间遥感器主镜支撑位置的优化[J].计算机辅助工程,2008,17(4):14-18.
[4]伞兵,王志宏,王书新,等.多谱段照相机面阵CCD交错拼接方法[J].长春工业大学学报:自然科学版,2011,32(6):584-588.
[5]王富国,杨洪波,杨飞,等.大口径主镜轴向支撑点位置优化分析[J].红外与激光工程,2007,36(6):45-51.
[6]付亮亮.小型反射镜支撑方案的设计与分析[J].光学技术,2008,34(4):76-80.
[7]徐加慧,夏立新,陈诚.基于有限元法的主镜支撑优化分析[J].机械设计与制造,2006,6(3):67-70.
A space remote sensor mirror flexible supporting structure
ZHANG Jun
(Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Science,Changchun 130033,China)
A flexible supporting structure for the fast steering mirror is with high rigidity and heatresistant stability.The surface shape accuracy RMS value reaches 1/50λ(λ=632.8nm)when the temperature is within±10℃.
mirror;flexible support;imaging quality.
TB 133
A
1674-1374(2014)01-0030-06
2013-12-22
国家863高技术研究发展计划资助项目(863251139)
张 军(1962-),男,汉族,吉林长春人,中国科学院长春光学精密机械与物理研究所副研究员,主要从事空间光学机械方向研究,E-mail:ccgqomh@163.com.
