用于精度设计的倒装芯片键合机几何误差建模
2014-06-04邱彪黄美发宫文峰唐亮
邱彪,黄美发,宫文峰,唐亮
(1.桂林电子科技大学机电工程学院,广西桂林 541004;2.北京中电科电子装备有限公司,北京 100176)
随着电子工业的飞速发展,芯片的特征尺寸越来越小,且芯片的I/O(输入/输出)数目急剧增加,给微电子封装设备的工作精度带来了日益严峻的挑战。面对微米级甚至纳米级的加工精度要求,我国电子封装设备企业或单位在高精度机器视觉定位系统的开发上做了大量研究,并取得了很好的效果。但在封装设备的机械精度设计方面,大多采用仿照类比和经验设计,从而导致影响总体精度的相关零部件精度偏高或偏低,达不到系统合理的精度设计要求,同时精度设计效率不高。
在总体精度要求和制造成本之间的博弈中,实现系统合理的精度设计,首要条件是建立能够准确、全面地反映出封装设备总体精度和各相关零部件精度之间的数学关系的封装设备几何误差模型。针对复杂机械系统的误差建模,国内外发展了多种不同的建模方法,由于基于多体系统理论的误差建模方法能全面考虑影响设备精度的各项因素以及相互耦合情况,以特有的低序体阵列来描述复杂系统,具有建模过程程式化、规范化、约束条件少、易于解决复杂系统运动问题的特点[1-2],所以得到了很好的发展和应用。因此,文中基于多体系统理论建立了某型号倒装芯片键合机的空间几何误差模型,并对基于几何误差模型的精度设计作了探讨,为下一步倒装芯片键合机系统合理的精度设计奠定了基础。
1 倒装芯片键合机总体结构
倒装芯片键合机是制作倒装芯片的关键封装设备,其总体精度直接决定着倒装芯片的成品率与质量。它的主要功能是将制有凸点电极的芯片与基板布线层直接键合,工艺流程为:芯片拾取→芯片与基板对准→施加键合力→施加热 (或超声波)→键合头复位[3]。
倒装芯片键合机包含7个运动部件,其中5个运动部件沿线性轴平动,2个运动部件沿回转轴转动,其总体结构如图1所示。从机架出发分出两个运动结构分支,一个是机架基板1-2-3-4分支,另一个是机架芯片1-5-6-7-8分支。其中,机架基板分支中各运动部件的相对运动实现基板的定位,机架芯片分支中各运动部件的相对运动实现芯片的定位,通过倒装芯片键合机两个运动结构分支的运动实现芯片与基板的对中和键合。
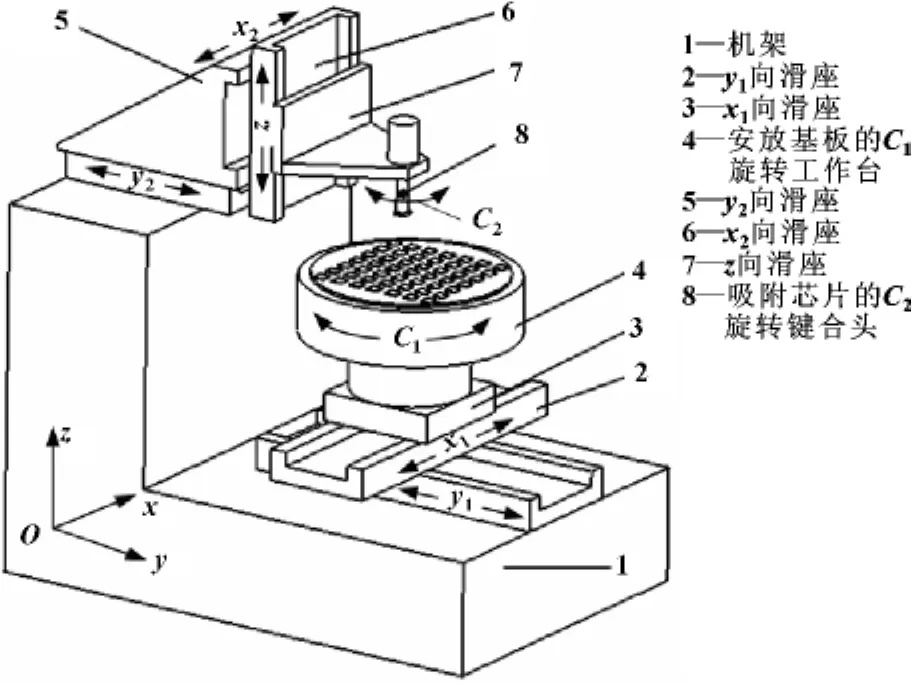
图1 倒装芯片键合机结构简图
2 倒装芯片键合机的几何误差建模
多个刚体或柔体,通过一定的连接方式 (如移动副、旋转副、铰接副等)形成的具有一定运动关系的机械系统称为多体系统[4]。基于多体系统理论的倒装芯片键合机空间几何误差建模方法是将倒装芯片键合机抽象成一个多体系统,用拓扑结构对该多体系统进行高度概括和提炼,用低序体阵列对拓扑结构进行描述,用齐次特征变换矩阵表示多体系统中体间的相对位置,最后,根据齐次坐标变换,用特征变换矩阵描述出倒装芯片键合机两个运动结构分支的执行末端相对于惯性参考坐标系的位置矢量,两者执行末端的位置矢量之差即为倒装芯片键合机的空间几何误差模型。
2.1 拓扑结构及其低序体阵列描述
拓扑结构是对多体系统本质的高度提炼和概括,是研究多体系统的依据和基础,构成拓扑结构的基本单元叫做“体”。倒装芯片键合机的多体系统拓扑结构如图2所示,由于机架放置在大地上固定不动,故将惯性体设为机架,机架为体B0,然后远离B0方向按自然数增长,从一支到另一支依次标定完两个分支上的所有体的序号。
对倒装芯片键合机拓扑结构进行低序体阵列描述,如表1所示。由表1可知,多体系统中任意个体都可以追溯到惯性体的关系中去。其中低序阵列的推导公式如下所示[5]:

式中:L为低序体算子,并称体Bj为体Bi的n阶高序体。它满足:

当Bj为体Bi的相邻体,有:
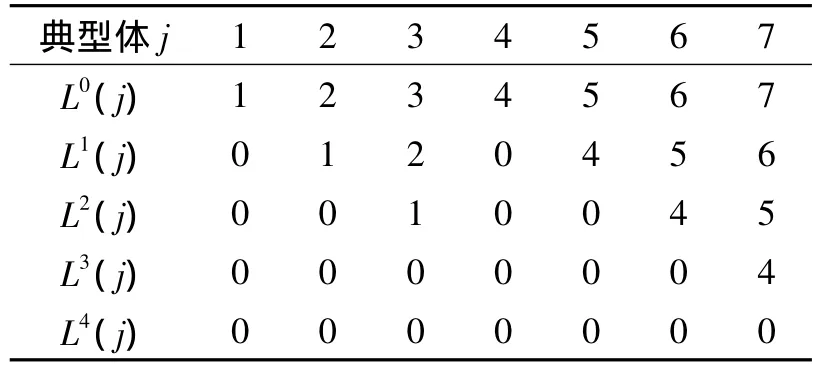
表1 低序体阵列
2.2 建立坐标系
针对倒装芯片键合机建立的多体系统,由惯性体B0和7个运动体Bj组成,其中j=1,2,3,…,7,它们通过移动副或转动副相连接。为了方便分析各运动体相对于惯性体的位置关系以及各体之间的相对位置关系,需要建立固连于各体的子坐标系,如图2所示,在倒装芯片键合机拓扑结构图中,惯性体B0和所有运动体上都建立起了与其固定联接的右手笛卡尔直角子坐标系,这些坐标系的集合称为广义坐标系。这样就可以将对多体系统中体与体之间的相对位置关系的研究转化为对各子坐标系的相对位置关系的研究。坐标系设置如下:
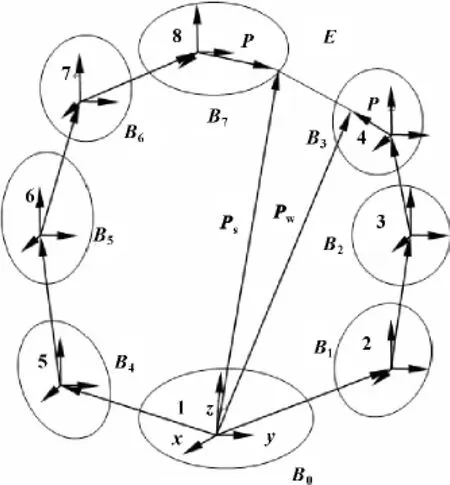
图2 倒装芯片键合机拓扑结构图
(1)由于将机架B0体设定为惯性体,所以在B0体上建立参考坐标系O0-x0y0z0,其中,x轴、y轴、z轴的方向与倒装芯片键合机运动轴方向相同。
(2)建立与每个典型体本身固定的子坐标系,其x轴、y轴、z轴的方向与惯性参考坐标系的坐标轴方向相同。子坐标系用Oj-xjyjzj来表示 (j=1,2,3,…,7),则C1旋 转 工作台 坐 标 系 为O3-x3y3z3,并令其坐标原点位于工作台面中心的基板键合面中心,C2旋转键合头坐标系为O7-x7y7z7,并令其坐标原点位于键合头上芯片键合面的中心。为了减少体间位置变换矩阵,使模型表达清晰和便于计算,需要对坐标系进行特殊设置,这些设置不会对模型产生影响[6],即在初始静止状态时,将上述各子坐标系原点与惯性参考坐标系O0-x0y0z0的原点重合,且坐标轴重叠。
2.3 倒装芯片键合机误差分析
由于倒装芯片键合机在制造和装配的过程中不可避免地存在误差,即存在几何误差,从而导致倒装芯片键合机工作时不能对芯片和基板进行准确定位。理想情况下,在运动轴的牵引下每个运动体只有一个相对运动的自由度。实际情况下,由于几何误差的存在,运动体除了在规定自由度运动方向上存在定位误差外,其他5个自由度方向也存在微量位移 (线位移和角位移)[7]。倒装芯片键合机有7个运动轴,故存在42项动态几何误差。此外,还存在运动轴之间的静态几何误差,即平动轴之间存在4项垂直度误差,转动轴C1与x1、y1轴和C2与x2、y2轴存在4项垂直度误差,所以倒装芯片键合机共有50项误差,如表2所示。
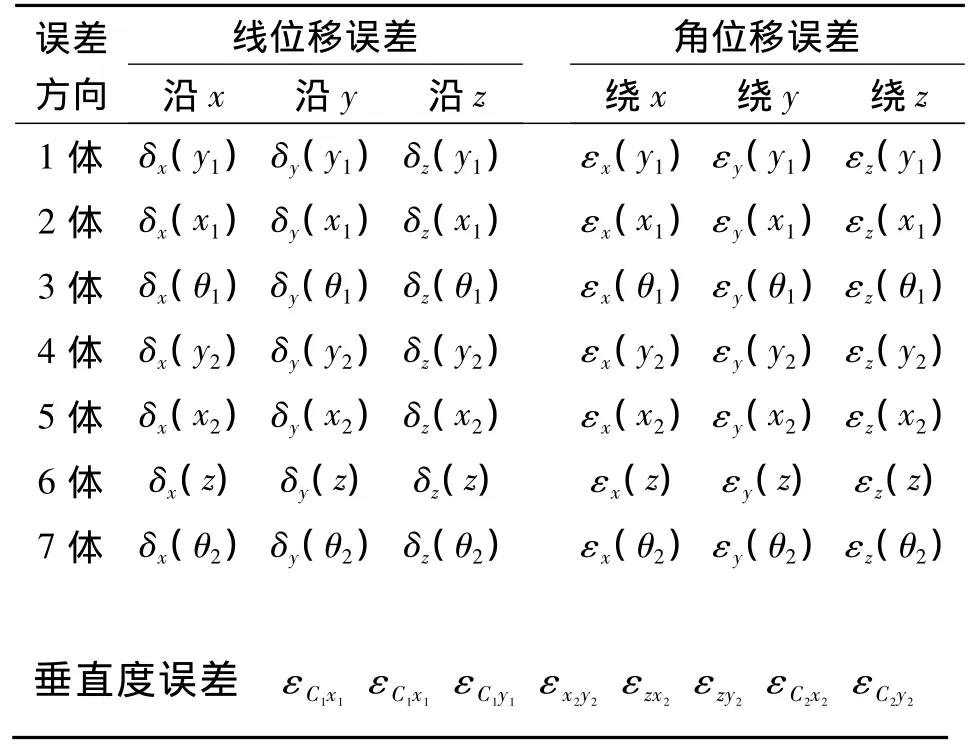
表2 倒装芯片键合机几何误差参数
2.4 相邻体变换矩阵
多体系统中各体之间存在相对静止和相对运动两种状态,采用4×4齐次变换矩阵来描述这两种状态。令Bi和Bj是相邻体,且Bj是Bi的相邻高序体。当Bj和Bi相对静止,Tijp为理想静止情况下的相邻体位置变换矩阵,Tijpe为相邻体位置误差变换矩阵;当Bj和Bi相对运动时,Tijs为理想情况下的相邻体运动变换矩阵;Tijse为相邻体运动误差变换矩阵[7-8]。
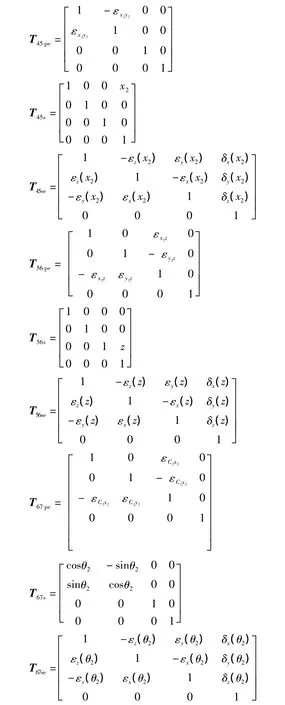
根据倒装芯片键合机的拓扑结构、坐标设置以及误差分析,得出倒装芯片键合机各相邻体的理想变换矩阵和实际变换矩阵如下 (未写出的变换矩阵为单位矩阵):
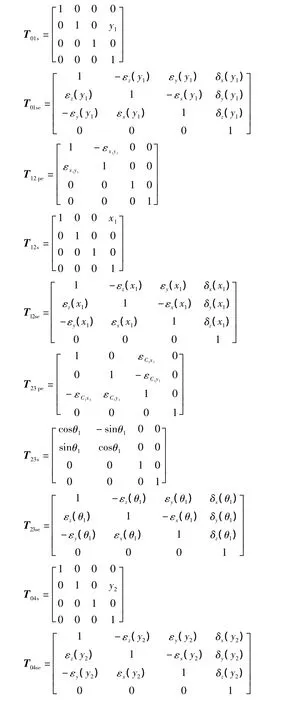
根据多体系统运动学理论,在理想条件 (无误差)下相邻体间变换矩阵为:

在实际有误差条件下相邻体变换矩阵为:

从而体Bj相对于体Bi的位置可以通过相邻体矩阵Tijreal或Tijideal变换得到。例如体B0和体B1之间的理想变换矩阵为:T01ideal=T01pT01s,实际变换矩阵为:T01real=T01pT01peT01sT01se,体B1相对于体B0的理想位置通过矩阵T01ideal变换得到,体B1相对于体B0的实际位置通过矩阵T01real变换得到。
2.5 几何误差模型
在实际情况下,由于倒装芯片键合机在制造和装配的过程中不可避免地存在误差。键合头上芯片键合面中心点P与工作台基板键合面中心点P'不重合,芯片和基板间存在键合误差。根据前文建立的坐标系,可知点P在体B7(键合头)坐标系O7-x7y7z7中的位置矢量为Rs= [0 0 0]T,点P'在B3(工作台)坐标系O3-x3y3z3中的位置矢量为Rw=[lm o]T。
根据图2所示的倒装芯片键合机的拓扑结构和相邻体间的位置变换,在机架芯片分支中,令点P在惯性体参考坐标系O0-x0y0z0中的位置矢量为Ps,根据齐次坐标变换有:
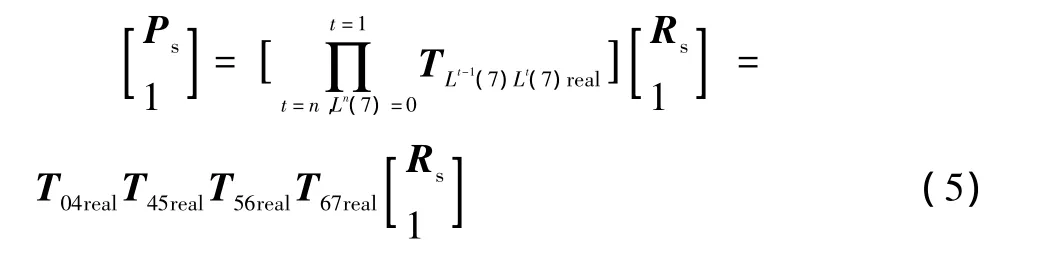
在机架芯片分支中,令点P'在惯性参考坐标系O0-x0y0z0中的位置矢量为Pw,根据齐次坐标变换有:

令E为点P与点P'之间的矢量偏差,且E=[exeyez]T,因此倒装芯片键合机的空间几何误差模型为:

3 基于几何误差模型进行精度设计探讨
传统的机械精度设计主要以静态精度设计为主,并以尺寸链理论作为精度设计基础。在尺寸链理论中,尺寸链是相互关联的尺寸按照一定的顺序首尾相接排列而成的封闭尺寸组,每一个尺寸称为环,环分为组成环和封闭环,封闭环误差是各组成环误差综合的结果。由于倒装芯片键合机是由封闭的运动链组成的,所以类比尺寸链理论,将倒装芯片键合机拓扑结构中的各体作为封闭运动链中的组成环,则理想运动量 (线位移或角位移)Tijs为组成环的基本尺寸,动态误差Tijse和静态误差Tijp即为组成环的误差,倒装芯片键合机的总体误差E=[exeyez]T即为封闭环,总体误差是各组成环误差综合的结果。
通过上面的类比分析,以封闭的运动链为依托,便可以基于几何误差模型对倒装芯片键合机进行精度设计。在进行精度分配时,可以根据总体精度反推几何误差模型中的各单项精度,并采用优化算法协调几何误差模型中的各项误差参数,实现对影响总体精度的相关零部件精度的优化分配;在进行精度分析时,将设计时确定的公差值或测量获得的几何误差值代入几何误差模型,便可以对倒装芯片键合机的总体精度进行预测。倒装芯片键合机的总体几何误差是相关零部件的功能表面 (接触面)的误差累积的结果,而倒装芯片键合机的几何误差模型中的各项动态误差以及静态误差都可以追溯到相关零部件的功能表面。因此,基于几何误差模型对倒装芯片键合机进行精度设计的过程中,倒装芯片键合机总体精度和相关零部件精度之间的联系变得更加紧密,比传统的精度设计更高效,更易达到系统合理的精度设计要求。
4 总结
以多体运动学为理论基础,综合考虑了影响倒装芯片键合机总体精度的相关零部件之间的动态和静态几何误差,建立了某型号倒装芯片键合机的空间几何误差模型。类比尺寸链理论,以倒装芯片键合机封闭的运动链为依托,对基于几何误差模型进行精度设计的思路进行了探讨,为倒装芯片键合机系统合理的精度设计提供了参考。
[1]贺甲,田学光,张德龙,等.基于休斯敦方法的机械手误差建模与分析[J].工程设计学报,2010,17(6):439-443.
[2]LIN Y,SHEN Y.Modeling of Five-axis Machine Tool Metrology Model Using the Matrix Summation Approach [J].International Journal of Advanced Manufacturing Technology,2003,23(4):243 -248.
[3]李建平,邹中升,王福亮.热超声倒装键合机视觉系统的设计与实现[J].中南大学学报:自然科学版,2007,38(1):116-121.
[4]刘以倩,孟庆杰.龙门式多轴联动机床的几何误差建模[J].机械设计,2012,29(8):64 -68.
[5]辛立明,徐志刚,赵明扬,等.基于改进的多体系统误差建模理论的激光拼焊生产线运动误差模型[J].机械工程学报,2010,46(2):61 -68.
[6]粟时平.多轴数控机床精度建模与误差补偿方法的研究[D].长沙:国防科技大学,2002.
[7]范晋伟,罗建平,蒙顺正,等.带摆角头五轴数控机床几何误差建模及补偿方法研究[J].机械设计与制造,2012(11):4-6.
[8]BINIT K J,ANJANI K.Analysis of Geometric Errors Associated with Five-axis Machining Centre in Improving the Quality of Cam Profile[J].International Journal of Machine Tools & Manufacture,2003,43(6):629-636.
