出弹平台进给系统刚柔耦合动力学建模与仿真
2014-05-31李少远周玉洁王茂林叶小红姜贵林
李少远,周玉洁,王茂林,叶小红,姜贵林
1.哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001
2.哈尔滨第一机器制造有限公司,黑龙江哈尔滨150000
舰炮作为舰艇的主要作战武器,在反舰作战、对岸火力打击及舰艇防空中具有不可替代的作用。随着现代军事技术的进步、海军战略思想及海战模式的变化,各国对舰炮尤其是舰炮的自动化弹库提出了更高的要求。而未来作战环境多为岛屿上的大量岸防工事和海洋上的水面舰艇等坚固点目标[1]。这就要求舰炮能够提供足够的火力支援和打击能力。出弹平台是舰炮自动化弹库供弹系统的重要组成部分,为了保证供弹速率,这要求出弹平台进给系统具有启动、进给和停止快速、定位准确的特点,因此研究出弹平台进给系统机电参数、性能匹配的可靠性和传动精度具有重要的意义。
1 出弹平台简介及机电参数计算
1.1 出弹平台进给系统简介
出弹平台进给系统由X平台、Y平台组成,两者结构原理类似,Y平台进给系统结构如图1所示,其结构主要包括伺服电机、联轴器、丝杠螺母、丝杠两端支撑轴承、导轨滑块及做直线运动的移动平台。伺服电机通过滚珠丝杠副将电机的旋转运动转化为移动平台的直线运动,使得移动平台在直线导轨上做直线运动[2-6]。弹箱在X平台和Y平台的联动下实现在出弹平台上的准确定位。

图1 出弹平台进给系统单元结构示意图
1.2 机电参数计算
1)负载惯量计算
为了使出弹平台进给系统具有快速响应的特点,必须选用加速能力大的伺服电机,但电机的惯量并不是越大越好,必须使伺服电机的惯量与负载惯量合理匹配。一般情况下,其匹配条件为:计算了转速、载荷、供油温度分别变化时轴瓦的最高温度,并与文献中的实验值[7]对比,结果如下:

式中:JL为负载惯量,JM为电机惯量。
出弹平台进给系统中折算到电机轴上的负载惯量为

式中,Jh为进给系统回转体的惯量;JZ为直线运动物体的惯量;ρ为回转体的密度;D为回转体的直径;L为回转体的长度;g为重力加速度;M为工作台和弹箱的总重量,P为丝杠的导程。
2)负载扭矩计算
在理想状态下,出弹平台进给系统的负载扭矩是由驱动移动平台时的摩擦力引起的,其计算公式如下:

式中,T0为由于丝杠预紧力引起的附加摩擦力矩;Tf为进给系统摩擦力引起的轴向转矩;N0为预紧力;K为滚珠丝杠预紧力矩系数0.1~0.2;η进给系统效率;i为减速器传动比;F为外部载荷,本系统中F=μWsin 45°,其中W为法向载荷,μ为导轨摩擦系数,μ=0.01。
3)加/减速力矩的计算
为了保证供弹速率,进给系统必须满足从一个弹位到另一弹位的快速启动与快速停止。在这个过程中所需的加速转矩Ta应该满足Ta≤Tmax。

式中n为平台快速移动时电机的转速;J为系统的转动惯量,J=JL+JM;Tmax为伺服电机的最大输出转矩;ta为电机的加减速时间。
根据式(1)~(3)可计算出出弹平台进给系统机电参数如表1所示。
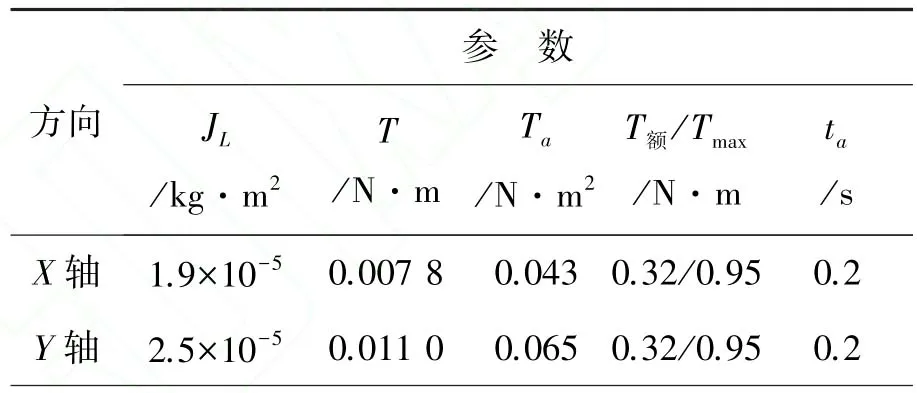
表1 出弹平台进给系统机电参数
2 系统刚柔耦合动力学建模与仿真
2.1 刚柔耦合动力学模型建立
本文是通过 Pro/E、ANSYS和 ADAMS联合仿真建立出弹平台传动系统刚柔耦合动力学模型[7],然后输入预定的运动规律进行仿真,仿真分析步骤如图2所示。
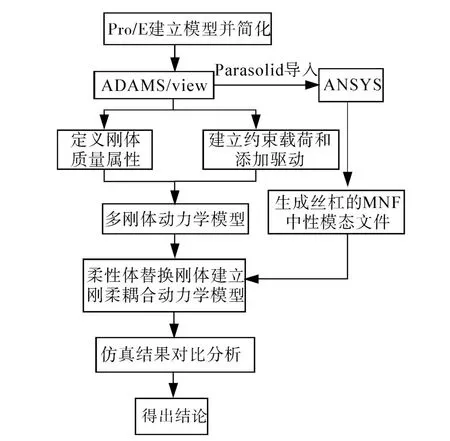
图2 传动系统仿真分析步骤流程图
图3为ANSYS导出的丝杠柔性体模型,其中丝杠的第7阶模态振型如图4所示。用柔性体替换刚体建立的刚柔耦合动力学模型如图5所示。添加运动副时丝杠螺母副的动静摩擦系数为fd=0.01、fs=0.02, 导 轨 移 动 副 的 动 静 摩 擦 系 数μd=0.01、μs=0.02。在出弹平台进给系统的X平台和Y平台上分别建立旋转驱动Motion_X和Motion_Y,为了保证供弹速率,平台的最大移动速度需为3 750 mm/min,此时伺服电机的转速为 3 000 r/min。根据加减速时间ta,通过step函数定义驱动。通过对仿真时间和步长的设置,可对出弹平台进给系统多刚体动力学模型和刚柔耦合动力学模型进行仿真分析。

图3 丝杠柔性体模型

图4 丝杠第7阶模态振型

图5 进给系统刚柔耦合动力学模型
2.2 仿真结果分析
图6和图7分别为X、Y平台以最大速度进给一个周期时电机所需提供转矩曲线。由图6和图7可以直观的看出,出弹平台进给系统X平台和Y平台在启动和停止时间内转矩有较大的波动,快速平稳移动时间内转矩保持恒定不变,且启动和停止瞬间的转矩要大于平稳移动时间内的转矩,X、Y平台最大转矩分别为40 N·m和60 N·m,平稳移动时的转矩分别为7 N·m和10 N·m,仿真结果与理论计算结果吻合,且满足Ta≤Tmax。在启动开始瞬间和停止结束瞬间转矩有突变,这是由于动静摩擦转变的结果。
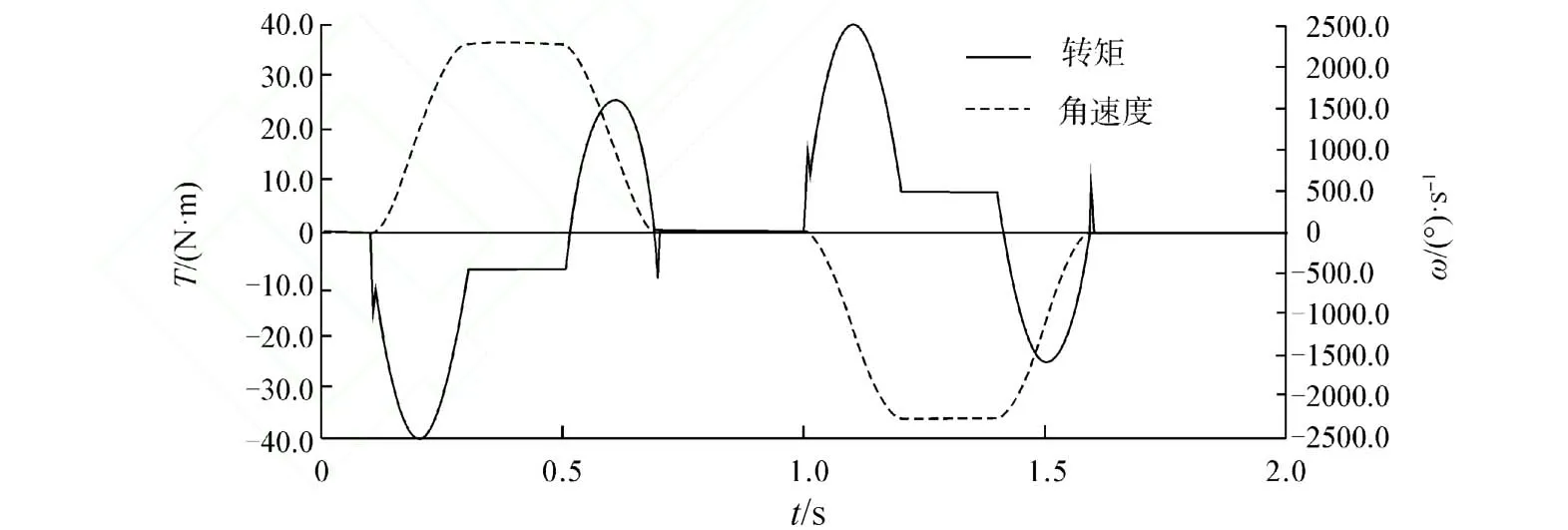
图6 X平台进给一个周期时电机所需提供转矩

图7 Y平台进给一个周期时电机所需提供转矩
图8和图9分别为X、Y平台以最大速度进给一个周期时弹箱在X、Y方向上的运动轨迹误差曲线。由图8和图9可以看出,在出弹平台进给系统进给过程中,弹箱在X、Y方向的运动轨迹的最大误差均为3×10-9m,误差均发生在加速和减速阶段,且误差呈“蝴蝶结”式分布,这是由加速度变化导致滚珠丝杠外加激励变化所引起的,当速度稳定时,误差值比较小且恒定,说明出弹平台进给系统达到了设计的要求。
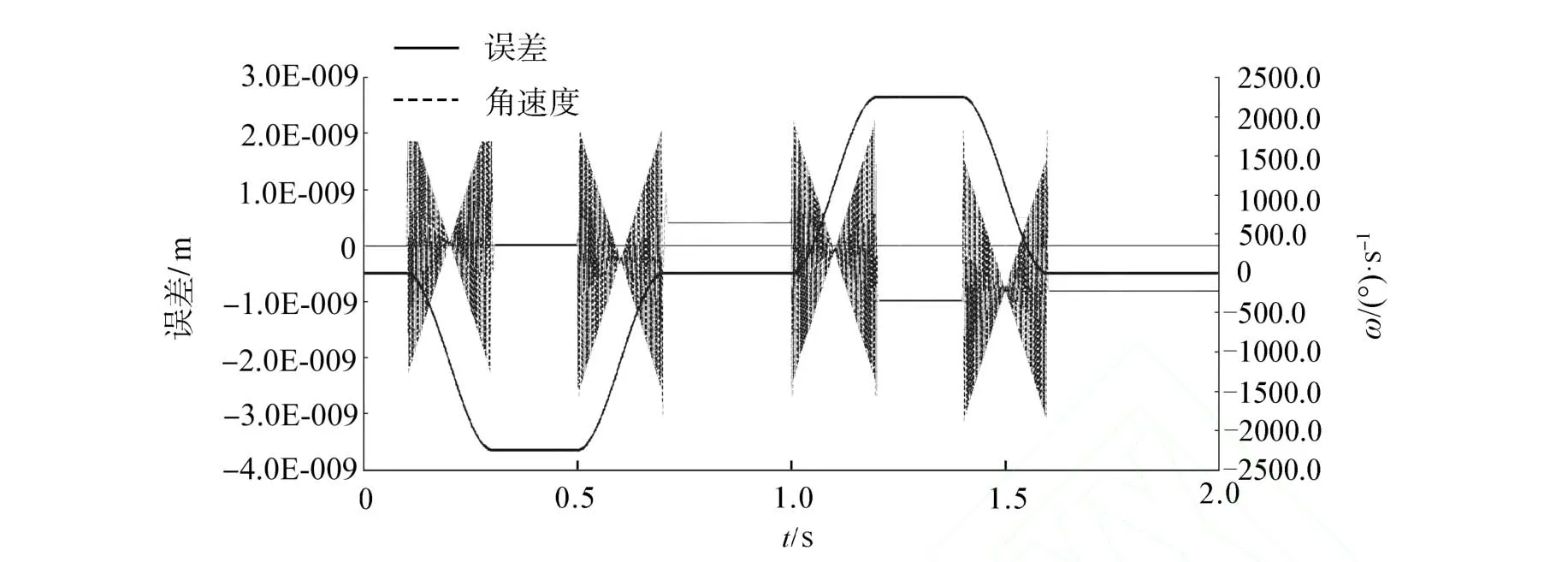
图8 X平台进给一个周期时弹箱运动轨迹误差
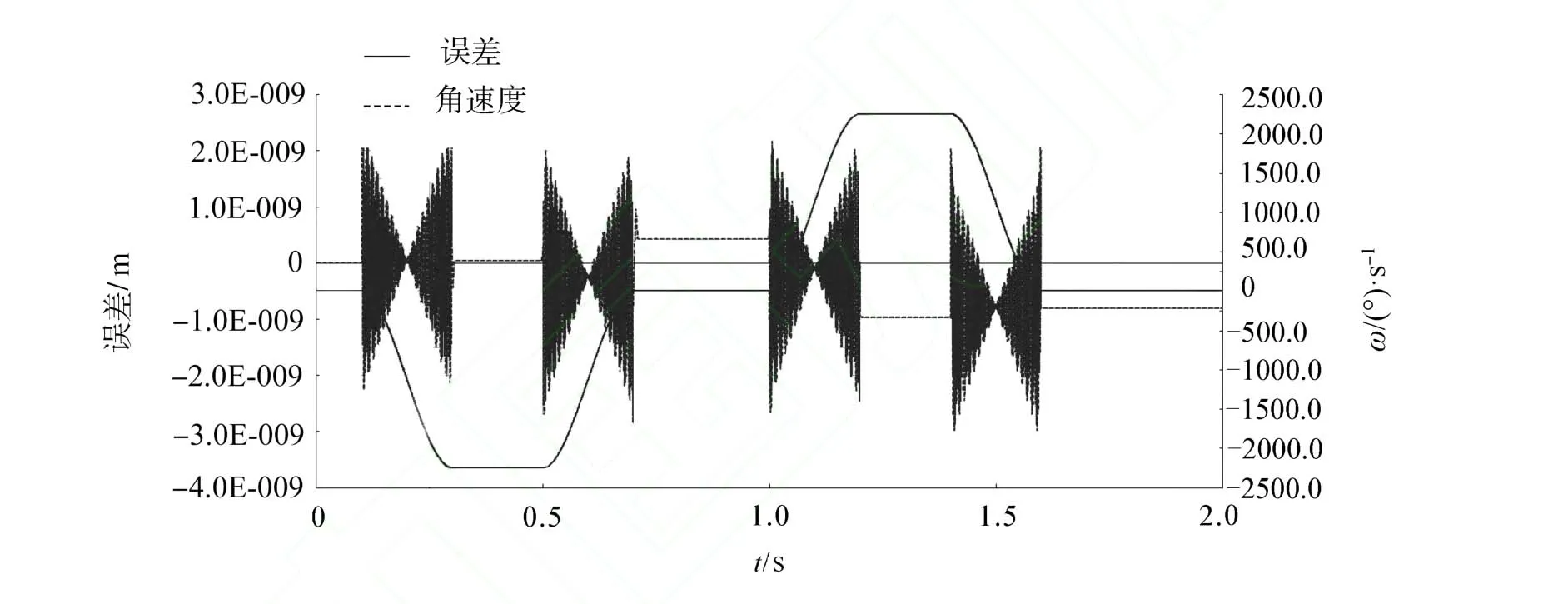
图9 Y平台进给一个周期时弹箱运动轨迹误差
3 结论
文中运用ANSYS和ADAMS软件建立进给系统的刚—柔耦合动力学模型,对进给系统的机电参数和伺服电机的选型进行校验,分析了滚动丝杠刚性体和柔性体情况下模型的输出参数。经过仿真分析,得出如下结论:
1)出弹平台进给系统在启动和停止时间内转矩有较大的波动,快速平稳移动时间内转矩保持恒定不变,且启动和停止瞬间的转矩要大于平稳移动时间内的转矩。
2)滚珠丝杠的柔性体会引起进给系统启动和停止时的振动,且振动呈“蝴蝶结”式分布,这是由加速度变化导致滚珠丝杠外加激励变化所引起的,当速度稳定时,误差值比较小且恒定,说明出弹平台进给系统达到了设计的要求。
[1]陈汀峰.对舰炮发展的思考[J].舰船科学技术,2007,29(1):3⁃10.
[2]廖平.高速数控车床进给系统切削运动平稳性分析[J].现代制造工程,2011,9:33⁃36.
[3]吴沁,芮执元,杨建军.滚珠丝杠进给系统刚度建模及仿真[J].现代制造工程,2010,11:5⁃8.
[4]卢秉恒,赵万华.高速高加速度下的进给系统机电耦合[J].机械工程学报,2013,49(6):2⁃10.
[5]杨晓君,赵万华,刘辉.丝杠进给系统的振动模态耦合分析[J].机械设计与制造,2012,10:259⁃261.
[6]张爱莲,陈书剑.ADAMS 柔性体建模技术研究[J].煤矿机械,2011,32(6):95⁃97.
[7]刘笃喜,李浩.拖锥收放装置传动系统刚柔耦合动力学建模与仿真[J].制造业自动化,2012,34(9):108⁃110.
