基于虚拟仪器技术的导航雷达信号采集器设计与实现
2014-05-31邓万红
邓万红
中国人民解放军92493部队 98分队,辽宁 葫芦岛 125000
导航雷达作为舰船关键设备之一,其工作状态和回波信号的正常与否对舰船的航行安全有着举足轻重的影响。除目标信息外,雷达回波信号还包含着大量丰富的遥感信息,作为后续信息提取和分析工作的基础,实时精确地采集雷达回波信号显得尤为重要[1-2]。虚拟仪器技术利用高性能的模块化硬件,结合高效灵活的软件来完成各种测试、测量和自动化的应用,它利用计算机系统的强大功能结合相应的软件,突破了传统仪器在数据处理、显示、传送和存储等方面的限制,给仪器仪表领域带来了革命性的变化[3-4]。将虚拟仪器技术与面向仪器系统的 PCI扩展(PCI extensions for instrumentation,PXI)技术相结合,不仅提高了系统的性能以及应用的灵活性,同时也保证了系统的可靠性和稳定性[5]。
本文基于虚拟仪器和 PXI技术构建了导航雷达信号采集系统,集导航雷达回波信号采集、同步显示、雷达工作状态监视、雷达图像存储及回放等多种功能于一体,实现了导航雷达回波模拟视频信号和多路同步信号的实时高速采集、存储和图像的实时回放。该系统在东海台湾海峡某海区的雷达监测岸基实验取得了很好的效果。
1 基于PXI的数据采集系统硬件设计
将传统仪器硬件和最新计算机软件技术结合起来,以实现并扩展传统仪器的功能,在智能化、处理能力、性价比和可操作性等方面均比传统仪器具有明显的优势。根据实际科研需求,本文设计的导航雷达信号采集器前端使用的是古野公司出品的1942MK2型导航雷达,涉及视频回波处理的模拟输出信号共有4路,其中1路为视频模拟量(电平在1.5~4 V之间),3路为开关量(分别是船首、方位增量和触发信号,电平均为CMOS),分析这4路信号的时序特性可知,触发信号可直接作为A/D采集的同步脉冲,而其他3路信号需要同步进行采集,即需要同步采集1路模拟量和2路开关量信号。基于导航雷达信号采集器的功能需要,模拟视频信号的采样频率不低于20 MHz,A/D采样分辨率不低于12位,雷达视频图像距离不低于4 500 m,通过对市面上几款常见高速A/D采集卡进行功能性能对比分析,最终选择了凌华公司出品的PXI9820采集卡。该卡具有14位高分辨率、2通道同步最大65 MS/s采样频率特点,适用于高端的数据采集应用,模拟输入的范围可由软件选择,提供-1~1 V或是-5~5 V两种范围,与导航雷达视频信号电平特性可直接匹配。PXI-9820在触发数据采集方面提供多样的选择,可实现多个模块同步采集的功能,特别是提供了2组与ADC有相同时钟的同步取样数字输入,非常适用于混合信号(模拟加数字信号)的采集,与本项目的需求直接匹配。由于 PXI-9820的触发信号和2路开关量输入端电平均为TTL,和古野1942MK2导航雷达的CMOS开关量输出电平不能直接匹配,因此在其间加入了信号调理模块,实现信号的电平转换。雷达单元产生的船艏信号、方位信号和触发信号通过信号调理模块预处理后,同雷达回波信号一起作为A/D采集卡的输入信号。对于触发信号只是加简单的幅值变换,将方位信号和船首信号变换到A/D采样要求的电平。A/D变换器对输入信号的幅值有一定的要求,因此在原始雷达视频信号在送人A/D变换器之前要进行幅值的反向变换,使得雷达视频信号变成正视频信号。
数据采集系统由基于PXI技术的工控机箱,A/D采集卡,PXI总线系统控制器和采集系统软件构成。数据采集卡采用ADLINK PXI-9820,采集系统基于PXIS-2508型PXI总线工控机平台和PXI-3950型PXI总线控制器(主板)构建。系统由PXI总线控制器控制采样系统运行[6-7]。由于PXI来源于PCI,使得系统后续的软件设计可以采用通用性强的主流软件模型,提高了系统设计的灵活性[8]。
数据采样信号包括产生于雷达天线齿轮箱的脉冲量船艏信号和方位信号,以及来自雷达收发机的雷达视频回波信号。采样系统以雷达收发机产生的触发脉冲作为启动数据采集的外部控制信号,通过船首和方位信号确定采样数据方位向成像位置,根据回波信号时间先后顺序确认距离向位置[9-10]。导航雷达的四路输出信号通过调理电路模块接入PXI9820数据采集卡,基于VC++6.0编程完成雷达回波数据采集及其处理。
根据实际科研需求设计的基于虚拟仪器技术的导航雷达信号采集器硬件系统结构如图1所示。

2 导航雷达数据采集软件设计
目前主要的虚拟仪器的开发软件有 Visual C++、Labview等,Visual C++是一个功能强大的可视化软件开发工具,在数据处理方面具有比Labview无可比拟的优势。结合导航雷达数据采集系统的功能要求,基于Visual C++6.0设计了数据采集软件系统,其体系结构如图2所示,主要包括雷达信号监视、回波信号采集与实时回放、采集数据预处理、采样数据成像处理、数据存储等功能模块。

图2 雷达信号采集器软件结构
利用Visual C++6.0设计了多路雷达信号采集系统的软面板,绘制了雷达图像显示界面,并对雷达信号参数进行实时监测。在输出参数组合框中根据实测的触发频率、船首周期、方位个数监视雷达的工作状态,对导航雷达输出的信号进行实时监测,判断雷达工作状态是否正常。
根据用户实际需求可以在软面板上进行采样参数配置,可针对不同型号的导航雷达进行参数配置,有较好的通用性,同时可以在参数配置对话框中选择对回波信号进行存储。点击开始可对雷达回波信号进行采集和实时显示,并且通过软件设计的GUI界面显示图像相关参数,如当前扫描方位角,采样距离和其他采样参数信息,如图3所示。
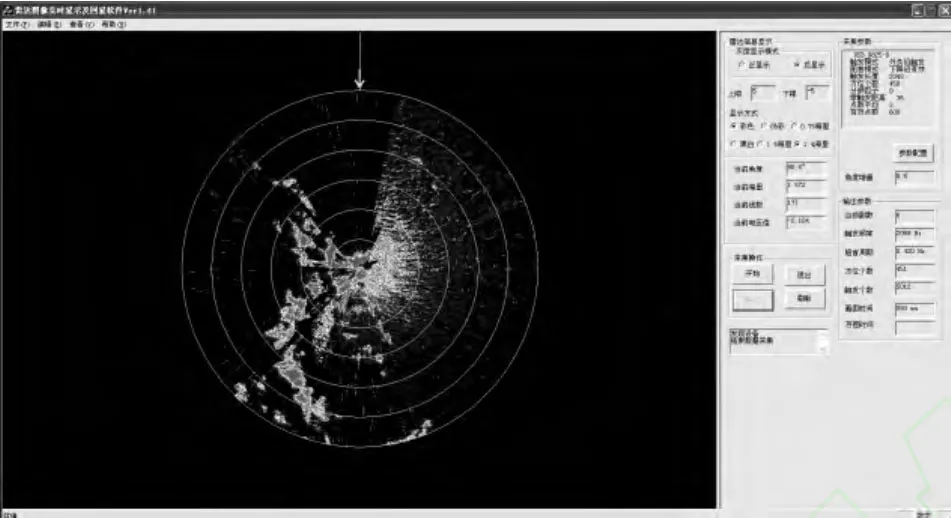
图3 雷达信号采集器软件显示主界面
在同时进行实时显示和存储图像时,当雷达工作在短脉冲时,每幅图像有 5000多根线,每根线600个点,往往来不及同时处理,对此可以在主界面上设置线数之间的角度间隔,减少画图线数,这样即可以满足实时显示和图像存储,也不影响雷达图像观测效果。
为便于观测分析,设计了以不同显示方式对采样数据图像进行显示的功能,包括伪彩、黑白、彩色等3种显示模式,也可以设置雷达图像显示范围,包括0.75、1.5、2.4海里等3级最大显示距离,如图4所示。

图4 雷达回波信号显示方式
为保证获取回波图像的连续性,需采样数据进行连续的数据流存储,但由于采样获取的数据图像文件较大,同时完成数据采集和图像显示比较困难。在此利用9820采集卡的缓存机制和VC++双线程编程,一个线程用于进行多通道数据采集,将采集到得数据放入系统实时数据缓冲区中;另一个线程用于从缓存中读出数据进行显示刷新,并在采集完一幅完整的图像后进行存储处理,待文件存储完毕,再迅速从实时数据缓存中读出采集到的数据用于刷新显示,由此获取了一组连续完整的雷达回波图像序列。
X波段航海雷达采集的雷达图像中包含大量的噪声,这些噪声的存在将降低雷达图像的质量,影响对海浪信息的提取。为了便于后续处理,将采集到得数据进行预处理,滤除雷达回波图像中的噪声,如同频干扰、雨雪噪声、固定物等,这样大大减少了后续处理时间。
3 关键技术及系统实验
本文分析设计了基于PXI技术的导航雷达回波信号采样方案,实现了基于PXI技术的硬件平台,利用Visual C++在Windows系统下编制了采集软件。基于Windows操作系统,采用多线程机制,设计了实时采样回放和图像提取分析软件,实现了PXI平台下导航雷达信号采集系统的完整功能。对于设计和实现过程中的关键问题,文中给出了合理的解决方案。通过采样实验,获取了大量的有效数据,证实了采样系统的设计功效。
3.1 关键技术
3.1.1 信号调理与多通道同步采集
由于导航雷达的成像特点,为保证采样数据成像的准确定位,需要采集系统在外触发的条件下,同时采集视频回波信号、船首信号和方位信号。考虑到导航雷达的实际输出信号并不符合采集卡对输入的要求,在两者之间加入信号调理模块。信号调理模块的主要功能是在保证各信号之间同步性的基础上,对导航雷达的触发脉冲、船首信号和方位信号调整幅值,并进行整形滤波,使之满足采集卡的输入要求。对于多路信号的同步采集,利用采集卡自身的数字量采样通道采集船首和方位信号。由于数字量采集通道与模拟量采集通道采样同步,将采集到的船首和方位信号存储在高2位,视频信号存储在低 14位,减少了对船首信号和方位信号的单独存储,降低了存储的数据量。
3.1.2 板卡缓存设置系统
当采样参数设为60 MS/s采样速率,双通道同时采集时,产生的数据流量为228.9 MB/s。根据实际需求,要求采样过程必须满足连续采集32幅以上雷达图像数据。由此得到的一次采样过程所获得的数据量将达到600 MB。在高速数据采集情况下,即使采用大容量缓存仍不能满足要求。解决此问题,可采用同步记录的方法。设置板卡缓存空间大小,使之满足采样数据写满缓存的时间小于缓存数据DMA传输时间与后续数据操作时间之和。通过此方法避免内存中前一次传输的数据尚未处理完毕,下一次的采样的数据已经传输到,造成实时显示的图像不完整或存盘文件的数据缺失。
3.1.3 可靠性
导航雷达的工作环境要求系统具有较高的可靠性,在设计过程中数据采集系统采用了基于PXI技术的硬件平台。PXI技术结合了PCI的电气总线特性与Compact PCI的坚固性、模块化及Eurocard机械封装的特性,使之适应复杂作业环境的应用。
3.1.4 多线程技术
为了实现高速数据存储和分析,基于Windows操作系统,采用多线程机制。一个线程专门负责读取AD数据,另一个线程负责存储或处理;通过开辟全局缓存来实现两个线程数据共享,通过事件来实现线程同步。
3.2 系统实验
2013年 8月起以此设备在国家海洋局福建平潭海洋环境监测站一直在开展海上科研实验。实验信源采用1942MK2型导航雷达进行连续图像采集,雷达参数如表1所示,期间采集到大量雷达海面回波图像序列。测试区域海深约为20 m,雷达距离海平面高度为 45 m,雷达图像无遮挡范围为船首向~,船首方向为地理坐标系的正东向。
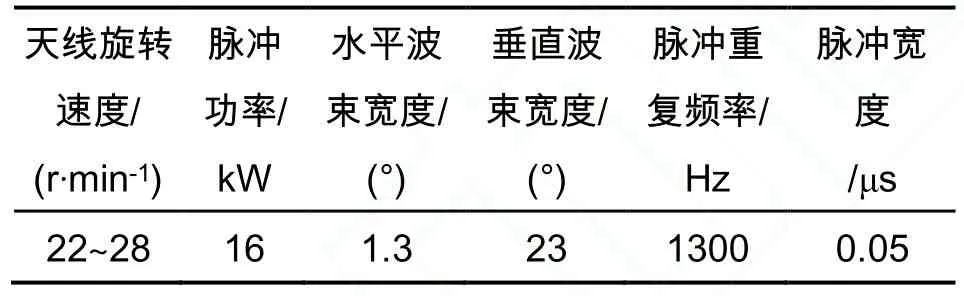
表1 X-波段导航雷达主要技术参数
图5给出了2013年9月18日获取的导航雷达海面回波极坐标图像序列。测量时风向,风速16.4 m/s。极坐标图像为雷达的海面回波区域。极坐标30°~180°为雷达的海面回波图像区域,其他区域是由于海岸等遮挡形成的雷达盲区。通过图5给出的一组雷达图像序列可以看出,由海表面区域散射的雷达回波受海面波浪的调制,其强度反映在图像上表现出类似于波浪的明暗条纹变化。海面回波区域中的明亮条纹可以认为是由海浪波峰散射的雷达回波,暗条纹可以认为是海浪波谷,与预期的采样结果相符。由此表明本数据采集系统很好地实现对导航雷达数据的采集与处理功能。

图5 雷达回波信号图像序列
4 系统运行与结论
从实现虚拟仪器功能的角度出发,虚拟仪器开发环境需具备如下特点:编程简单、易于理解和修改;具有强大的人机交互界面设计能力,易于实现各种复杂的仪器面板;具有数据可视化分析能力,提供丰富的仪器和总线接口硬件驱动程序。
利用PXI硬件构建了高效可靠的雷达信号采集平台,实现了模拟量和数字量多路信号的混合采集。基于Windows操作系统,采用多线程机制,设计了实时采样回放和图像提取分析软件,实现了PXI平台下导航雷达信号采集系统的完整功能。
导航雷达数据采集器不但可以作为雷达的信号同步调试和外场实验的数据记录仪,还可以用于其他多路信号分析和基于PXI技术的采集等方面,充分实现了同一设备的多功能复用,很好地控制了项目成本;同时,采用PXI技术实现系统硬件平台,精简了整个系统,减小了系统的体积空间,使仪器工作方式配置灵活,扩展方便,同时提高了系统的可靠性,为现场复杂环境下的实地工作提供了有力保障。
[1]SKOLNIK M I. 雷达手册[M]. 王军, 林强, 米慈中, 等译. 北京:电子工业出版社, 2006: 504-505.
[2]吕浩然, 孙凯. 虚拟仪器在雷达测试方面的应用[J]. 电子科技, 2013(7): 87-90.
[3]高占凤, 杜颜亮, 苏木标, 等. 基于虚拟仪器的桥梁远程状态数据采集系统[J]. 仪器仪表学报, 2006, 27(10):1361v1364.
[4]卢剑其, 赵拥军, 党同心. 虚拟仪器技术在雷达系统测试中的应用[J]. 仪器仪表学报: 增刊, 2005, 26(8):258-261.
[5]刘洪. PXI技术的发展和应用[J]. 测控技术, 2006, 25(6):51-53.
[6]王福友, 袁赣南, 卢志忠, 等. 基 PXI-9820对海浪雷达回波采集系统的设计与实现[J]. 海洋测绘, 2008, 28(2):52-56.
[7]孙尧, 王立宁, 卢志忠. 导航雷达回波信号的实时采集与回放[J]. 微计算机信息, 2009, 25(6): 36-39.
[8]刘肇斌, 陈护勋. PXI总线及其应用综述[J]. 计算机与数字工程, 2002, 5(2): 33-35.
[9]马烈. 小型船用导航雷达设计[J]. 现代导航,2013, 4(2):125-128.
[10]罗来金, 曾连荪, 夏念. 航海雷达数据高速采集回放设计与实现[J]. 电子设计工程, 2011(7): 46-48.
