基于有限线积分变换的序列图像运动目标检测
2014-05-28宋芳琴
宋芳琴
(绍兴职业技术学院 信息工程学院,浙江 绍兴312000)
智能视频监控技术的研究是一个具有挑战性的前沿课题,涉及计算机科学、人工智能、机器视觉、图像工程、模式识别等多个学科[1]。智能视频监控技术的研究包括对动态场景中的目标定位、目标识别和目标跟踪等,并在此基础上分析和判断目标的行为,获得对图像内容的理解及对客观场景的解释,从而对行动进行指导和规划[2-3]。
运动目标检测主要是从序列图像中将变化区域从背景中分离出来。在进行运动检测时,常见的一种方法是摄像设备处于静止状态,而且镜头焦距也是固定的,此时,图像中的背景区域固定不动。这种情况下通常使用以下3种方法进行运动检测:光流法[4]、相邻帧差法[5]、背景差法[6]。
光流法可以在不需要背景区域的任何先验知识情况下,就能够实现对运动目标的检测和跟踪,并且可以应用在摄像机运动的情况。但光流法计算量太大,而且对噪声较敏感,对硬件的要求也比较高。
相邻帧差法能适应环境的动态变化,实现实时的运动动态检测,但分割出的运动目标不太完整。如果运动目标的速度过快,可能会检测2个运动目标,如果运动目标的速度很慢甚至在场景中停止,可能就检测不出运动目标。在一个场景中如果有多个运动目标,该方法会很难区分各个运动目标。
背景差法是一种最为简单和有效的方法,此方法通过当前帧减去背景参考帧,然后对所得图像选择合适的阈值二值化后,就得到完整的运动目标,这样,克服了相邻帧差法的缺点。但背景往往会发生变化,使得检测出的运动目标出现偏差。因此,如果背景图像能自适应更新,背景差法的效果会比较好。
本研究选用新近出现的多尺度几何分析方法——有限线积分变换作为研究工具,再结合背景差法对运动目标进行检测。实验结果表明,该方法能有效检测呈现出线性特征的运动目标,且对光照变化具有一定的鲁棒性。
1 有限线积分变换算法
2005年,Yang M Q等提出了有限线积分变换[7](finite line integral transform,FLIT)。现以5×5的模板为例,对FLIT进行介绍,如图1所示。图1中,相同数字的方格属于同一条直线,方格X表示属于任何一条直线。
从图1可以看出:每条直线都通过模板中心的方格;所有的直线都只在模板中心方格处相交;除模板中心方格外,其余的每个方格只属于一条直线;关于模板中心方格对称的方格属于同一条直线。更一般的形式,设模板尺寸为p×p(p为一奇数),按上述方式定义出的直线共2(p-1)条。(当p≥7时,定义直线的方式不唯一。)设模板中心方格的坐标为(x,y),则在点(x,y)处的FLIT定义如下[7]:
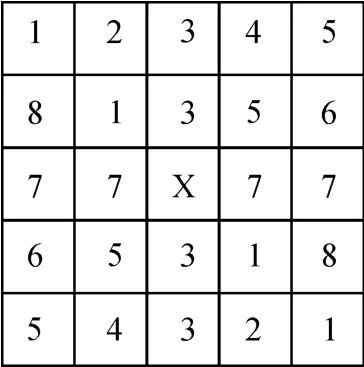
图1 5×5的模板Fig.1 5×5template

式(1)中:Lk—标记为k的那些方格的集合,不同的k代表了不同斜率的直线集合,k的取值范围是1≤k≤2(p-1);f(i,j)—(i,j)点的像素值。
对于一幅尺寸大小为m×n的图像而言,相应的FLIT计算步骤如下[7]:
1)确定模板尺寸p×p,p为一奇数。
2)对图像进行延拓操作,上、下、左、右分别加(p-1)/2行或列的零值,延拓后的图像尺寸变为m′×n′,其中m′=m+p-1,n′=n+p-1。像素值记为f′(i′,j′),其中0≤i′≤m′-1,0≤j′≤n′-1。
3)对满足

的任一像素点f′(i′,j′),记以(i′,j′)为中心,p×p的区域为D(i′,j′),将D(i′,j′)内的图像转换为零均值的图像。
4)计算(i′,j′)点,共2(p-1)个方向的FLIT。
5)对满足式(2)的所有像素点,依次重复步骤3和步骤4。
2 检测方法
对运动目标检测的研究采用“FLIT+背景差法”,算法步骤如下:
设图像尺寸为m×n,
1)分别对背景图像和当前图像作5×5的FLIT,记作bFLIT(k,i,j)和pFLIT(k,i,j),其中0≤k≤7,0≤i≤m-1,0≤j≤n-1。
2)∀k∈ {0,1,2,3,4,5,6,7},计算背景图像FLIT和当前图像FLIT差值系数的绝对值

的均值mk和方差σk(共有8组均值和方差),相应的计算表达式为,

3)对dk,k∈ {0,1,2,3,4,5,6,7}分别进行二值化,二值化的规则如下:

式(5)中:t— 常数,常取t=1;1代表运动目标,0代表背景。
4)对代表不同方向特征的8幅二值图像进行综合,综合的原则是:突出需要的方向特征,抑制不需要的方向特征。例如,由先验知识知道,某序列图像的运动目标主要以垂直方向为主,则在综合不同方向特征的8幅二值图像时,图1模板中1~5的方向特征则需突出(特征权重大),6~8的方向特征则需抑制(特征权重小)。
5)采用数学形态学中的开操作来解决孤立噪声(光噪变化引起)的问题。开操作是先腐蚀后膨胀的过程,相关的定义如下[8]:
A用B来腐蚀、膨胀,分别记做AΘB、A⊕B

式(7)中:^B = {w|w =-b,b∈B}。
3 实验结果与分析
实验数据来自文献[9],实验环境为PC+Microsoft Visual C++6.0。图2为背景图像和一帧序列图像。图3为对背景图像和检测图像分别作5×5的FLIT,并使用背景差法且二值化后的8个方向的图像。图4为综合8幅图像并进行形态学操作后的结果。图5是为显示检测结果的正确性和合理性,将图4中的检测结果映射到原检测图像上的显示。结合图4和图5可以看出,除了区域1(由光照变化引起)外,区域2、3、4、5都是期望被检测出的结果。区域2是背景图像中交谈的2个人,其相对位置发生了移动;区域3是相对于背景图像新走进的2个行人;区域4是远处一个行人走过引起图像局部的变化(局部放大图如图6所示);区域5是一个行人走到柱子后面,露出了其脚后跟(局部放大图如图7所示)。区域1、2、3、4、5的共同点在于,它们都呈现出一定的线性特征,这正是它们能被FLIT检测到的根本原因。图8是检测出由于行人的影子使背景(如柱子表面)呈现出线性特征变化的区域。

图2 实验图像Fig.2 Experiment images

图3 不同方向上的检测结果Fig.3 Detection results of different orientations

图4 运动目标检测结果Fig.4 Detection result of moving object

图5 检测结果在检测图像上的映射Fig.5 Mapping of detection result in dection image
总的来说,在笔者所做的实验图像序列中,当前检测图像中的地板、柱子表面、墙面等与参考图像中的地板、柱子表面、墙面等相比,都存在或多或少的光照变化,而这些变化都不是实验所关心的。在绝大部分的检测结果中可以看到,上述变化对感兴趣运动目标的检测影响较小。因此,该方法对光照变化具有一定的鲁棒性。

图6 区域4的图像放大图Fig.6 Enlarged images of region 4

图7 区域5的图像放大图Fig.7 Enlarged images of region 5

图8 实验结果Fig.8 Experiment result
4 结 语
本研究以新近出现的多尺度几何分析方法FLIT为基础,结合背景差法来进行运动目标的检测。实验结果表明,该方法对具有线性特征的目标能进行有效的检测,并对光照变化具有一定的鲁棒性。同时,该方法对运动目标的检测还存在少量的漏检测或过检测的情况,因此,呈现出运动目标不完整或者是引入非感兴趣的运动目标。这些是下一步研究需要解决的问题。
[1] 王素玉,沈兰荪.智能视觉监控技术研究进展[J].中国图象图形学报,2007,12(9):1505-1514.
[2] 牛少平.计算机视频监控技术研究[D].西安:西北工业大学,2006.
[3] 谢少林.智能监控系统中高压缩比视频处理研究[D].杭州:浙江大学,2006.
[4] Smith S M,Brady J M.ASSET-2:Real-time motion segmentation and shape tracking[C]∥Fifth Internation Conference on Computer Vision.Cambridge,MA:IEEE Computer Society,1995:814-820.
[5] Meier T,Ngan K N.Automatic segmentation of moving objects for video object plane generation[J].IEEE Transactions on Circuits and systems for Video Technology,1998,8(5):525-538.
[6] Stauffer C,Grimson W E L.Adaptive background mixture models for real-time tracking[C]∥Conference on Computer Vision and Patten Recognition.Fort Collins,CO:IEEE Computer Society,1999:246-252.
[7] Yang M Q,Peng Y H,Liu Y X.The algorithm and application of finite line integral transform[C]∥Microwave,Antenna,Propagation and EMC Technologies for Wireless Communications.Beijing:IEEE Computer Society,2005:411-414.
[8] Gonzalez C R,Woods R E.Digital Image Processing[M].2nd ed.Beijing:Publishing House of Electronics Industry,2005,519-527.
[9] Online Computer Computers,Inc.History of OCLC[EB/OL].[2013-12-17].http:∥homepages.inf.ed.ac.uk/rbf/CAVIAR/.