过热汽温串级MCP-PID控制
2014-05-25苏隽成杨平
苏隽成 杨平
(上海电力学院自动化工程学院,上海 200090)
过热汽温串级MCP-PID控制
苏隽成 杨平
(上海电力学院自动化工程学院,上海 200090)
为提高过热汽温控制品质,尝试将一种新型的PID控制器——MCP-PID控制器应用于过热汽温串级控制系统中。针对一个典型的过热汽温过程,设计了串级的MCP-PID控制器,并利用Simulink仿真平台进行了控制系统仿真试验。仿真试验结果表明,在设定值扰动试验和内外扰动试验中,MCP-PID控制器均优于传统PID控制器,具有超调量小、调整时间短、扰动抑制强和鲁棒性高的特点,值得在复杂工业控制系统中推广应用。
PID控制 多容惯性 串级控制 过热汽温 火电厂
0 引言
电站锅炉过热汽温控制品质是电站锅炉运行的一个重要考核要素,它与过热器、汽轮机叶片的寿命和机组热效率都有关系,对电厂的安全经济运行有很大影响。对于电站锅炉汽温控制系统,其回路长、扰动多,采用一般的传统PID控制方案难以取得令人满意的控制品质。因此,业内对于锅炉汽温控制系统的改进研究一直没有停止过。文献[1]提出了一种改进的PID控制器,即多容惯性PID(multiple capacity process PID, MCP-PID)控制器(其建立理论方法可参见文献[2])。MCP-PID的结构与传统PID相同,但参数整定依据一种新的标准传递函数,即多容惯性标准传递函数[3]。这种标准传递函数具有无超调、不限系统阶数和不限系统型次的优良特性[4]。所以,以下阐述的电站锅炉过热汽温串级控制系统的研究工作是串级控制系统内外控制器采用MCP-PID控制器的新尝试。仿真试验表明,与采用常规的PID控制器相比,新系统有着超调量小、鲁棒性高的明显优势。
1 MCP-PID控制器
根据文献[1],对于式(1)所示的典型的有自平衡单容时滞被控过程模型Gp(s),若采用PI控制,即式(2)所示控制器传递函数,则有式(3)所示的MCP-PID参数整定计算公式;若采用PID控制,即式(4)所示控制器传递函数,则有式(5)所示的MCP-PID参数整定计算公式。

式中:K为被控过程增益;T为被控过程惯性时间;τ为被控过程迟延时间;Kp为控制器增益;Ti为控制器积分时间;Td为控制器微分时间。
2 汽温串级控制器设计
结合一个具体的控制工程案例,采用两步法整定两个串级控制器,并采用两点法拟合所需的单容时滞模型,展开对过热汽温串级MCP-PID控制器的设计。
引用文献[5]中的石横电厂300 MW单元机组汽温实际控制案例。该控制系统的串级控制结构如图1所示。主对象和副对象的具体被控过程模型如式(6)和式(7)所示。这些被控过程模型是根据石横电厂300 MW单元机组1号炉过热器系统在210 MW负荷下的运行数据辨识得出的。式(6)表示的是副对象(导前区)过程数学模型,式(7)表示的是主对象(惰性区)过程数学模型。

图1 汽温串级控制系统结构图Fig.1 Structure of the steam temperature cascade control system

根据文献[5],采用常规方法整定得出的一组PID参数如式(8)和式(9)所示。式(8)表示常规副调节器参数,式(9)表示常规主调节器参数。

2.1 副调节器的MCP-PID控制器参数计算
计算副调节器的MCP-PID控制器参数时,先要知道内回路受控过程的单容时滞过程模型参数,即K、T和τ。为此,利用文献[6]介绍的根据过程阶跃响应求解内回路单容时滞过程模型参数的两点法。
先根据式(5)所示副对象过程数学模型,利用Simulink仿真平台做出单位阶跃响应曲线,再从曲线上测量出3个参数,如式(10)所示,则根据两点法公式可算出副对象过程的单容时滞过程模型参数,如式(11)所示。根据式(3)可算得副调节器的MCP-PID控制器参数,如式(12)所示。

2.2 主调节器的MCP-PID控制器参数计算
计算主调节器的MCP-PID控制器参数时,先要知道外回路受控过程的单容时滞过程模型参数,即K、T和τ。为此,可利用文献[6]介绍的根据过程阶跃响应求解内回路单容时滞过程模型参数的两点法。不过,外回路受控过程为主对象(惰性区)过程与内回路控制系统的串联过程,所以先利用Simulink仿真平台做出外回路受控过程的单位阶跃响应曲线,再从曲线上测量出3个参数,如式(13)所示,则根据两点法公式可算出外回路受控过程的单容时滞过程模型参数,如式(14)所示。根据式(5)可算得主调节器的MCP-PID控制器参数,如式(15)所示。
3 汽温串级控制仿真试验
为验证MCP-PID控制器应用过热汽温串级控制系统的性能,设计了设定值与内外扰动仿真试验。设定值阶跃扰动在一开始就加入,然后在t=90 min加入内扰方波信号(幅度d2=1,持续时间从t=90 min到t= 95 min);在t=150 min加入外扰方波信号(幅度d1=1,持续时间从t=150 min到t=155 min)。仿真试验系统中包含了一个过热汽温传统PID串级控制系统。
传统PID和MCP-PID抗扰性曲线如图2所示。其中,实线为传统PID控制响应曲线,虚线为MCP-PID控制器控制响应曲线。由图2可看出,对于设定值阶跃扰动,MCP-PID控制响应在超调量和调整时间方面明显优于传统PID控制。对于内回路扰动抑制,MCPPID控制明显较传统PID控制强,其波动幅度还不及传统PID控制的一半。对于外回路扰动,MCP-PID控制的波幅也只有传统PID控制的3/4。由此可见, MCP-PID控制优于传统PID。

图2 抗扰性比较曲线Fig.2 Comparison curves of the anti-interference capability
为考察MCP-PID控制器应用过热汽温串级控制系统的鲁棒性性能,还进行了改变过程模型参数的鲁棒性试验。一般而言,当过程模型的增益参数变小或是惯性时间常数变大时,按过程模型参数未变时设计的控制系统的性能有恶化的趋势。因此,鲁棒性试验具体设计了过程模型的增益参数变小和惯性时间常数变大两项典型试验。
首先把惰性区传递函数的K=0.5改为K′=0.3,相当于参数值减小40%。这种变参数试验在传统PID控制系统和MCP-PID控制系统中同时进行。传统PID和MCP-PID对于K的鲁棒性比较曲线如图3所示。图3中,实线是K=0.5时的传统PID控制响应;点线是K=0.5时的MCP-PID控制响应;短划线是K=0.3时的传统PID控制响应;点划线是K=0.3时的MCPPID控制响应。
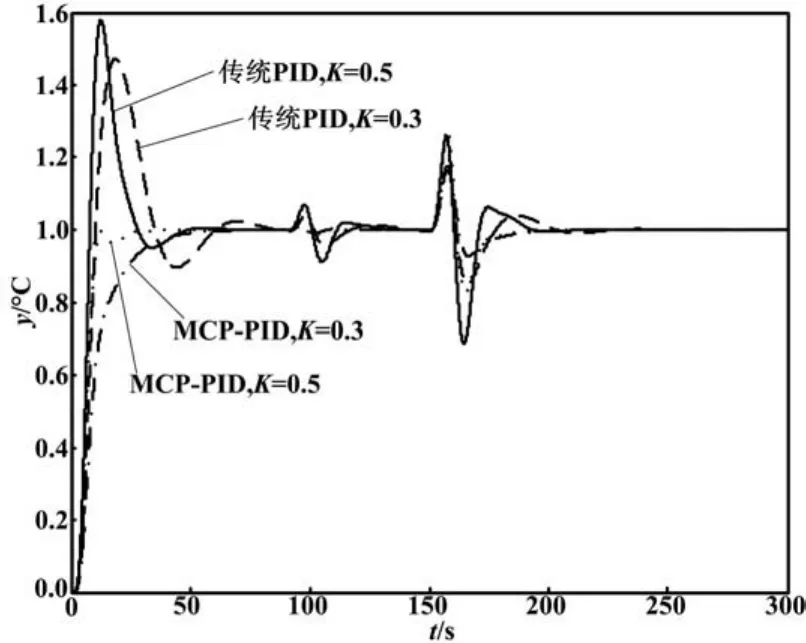
图3 对于K的鲁棒性比较曲线Fig.3 Comparison of the robustness to K
从图3可以看出,当K=0.5变化为K′=0.3时, MCP-PID控制响应曲线变化幅度小于传统PID控制响应曲线变化幅度。由此表明,对于过程增益变化,MCP-PID控制的鲁棒性优于传统PID控制。
其次,把惰性区传递函数的T1=1.2 min改为T1′= 2.2 min,相当于参数值增大83%。这种变参数试验在传统PID控制系统和MCP-PID控制系统中同时进行。传统PID和MCP-PID对于T的鲁棒性比较曲线如图4所示。
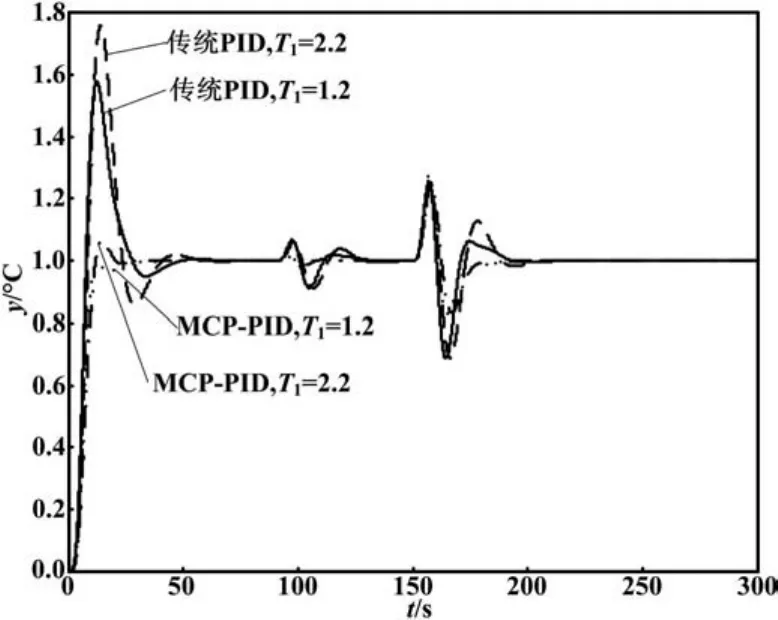
图4 对于T的鲁棒性比较曲线Fig.4 Comparison of the robustness to T
图4中,实线为T1=1.2 min时的传统PID控制响应;点线为T1=1.2 min时的MCP-PID控制响应;短划线为T1=2.2 min时的传统PID控制响应;点划线为T1=2.2 min时的MCP-PID控制响应。从图4可以看出,由T1=1.2 min变化为T1=2.2 min时,MCP-PID控制响应曲线变化幅度小于传统PID控制响应曲线变化幅度。由此表明,对于过程时间常数变化,MCP-PID控制的鲁棒性优于传统PID控制。
4 结束语
综上所述,MCP-PID控制器[7-11]用于电站锅炉过热汽温串级控制系统的研究表明,MCP-PID控制器相比于传统PID控制器,具有超调量小、调整时间短、扰动抑制强和鲁棒性高的优势。对于类似电站锅炉过热汽温串级控制系统的复杂工业控制系统,MCP-PID控制器有推广应用价值。
[1] 杨平,黄伟,孙宇贞,等.PID参数整定的MCP标准传递函数法公式[J].上海电力学院学报,2014,30(1):40-45,70.
[2] 杨平.多容惯性标准传递函数控制器——设计理论及应用技术[M].北京:中国电力出版社,2013.
[3] 杨平,余洁,孙宇贞.多容惯性标准传递函数的建立与比较[J].上海电力学院学报,2011,27(5):512-518.
[4] 杨平,陈式跃.无超调不限阶数的M型次多容惯性标准传递函数[J].中国测试,2013,39(2):14-18.
[5] 谢克明,牟昌华,谢刚.采用模糊PID控制的火电厂过热汽温串级控制[C]∥第19届中国控制会议论文集,中国香港,2000:800-803.
[6] 黄德先.过程控制系统[M].北京:清华大学出版社,2011:401-412.
[7] 王竹林,于迪锋,徐生林.交流伺服系统中PID参数模糊自整定控制器[J].机电工程,2009,26(1):57-59.
[8] 马占有.模糊PID控制技术在烘干炉单片机温度控制系统中的应用研究[D].银川:西北第二民族学院,2007.
[9] 魏巍.Matlab控制工具箱技术手册[M].北京:国防工业出版社,2004.
[10] 吕剑虹,陈来九.模糊PID控制器及在气温控制系统中的应用研究[J].中国电机工程学报,1995,15(1):16-18.
[11] 曹茂俊,李盼池,肖红.两字神经网络在PID参数调整中的应用[J].计算机工程,2011,37(12):182-184.
Superheated Steam Temperature Cascade Control System Based on MCP-PID Control
In order to improve the control quality for temperature of superheated steam,the new type of PID controller,i.e.,MCP-PID controller has been applied in superheated steam cascade temperature control system.The cascade MCP-PID controller is designed for a typical superheated steam process,and the simulation test of the control system is conducted by using Simulink simulation platform.The results of simulation test show that in set-point disturbance test and internal and external disturbance tests,MCP-PID controller is better than traditional PID controller,it features small overshoot,short adjusting time and high capability of disturbance rejection and strong robustness,so it is worth to be promoted in complex industrial control systems.
PID control Multiple capacity process(MCP) Cascade control Superheated steam temperature Fossil power plant
TP13
A
上海市科技创新行动计划基金资助项目(编号:13111104300);
上海市电站自动化技术重点实验室基金资助项目(编号:13DZ2273800)。
修改稿收到日期:2014-04-26。
苏隽成(1992-),男,现为上海电力学院自动化专业在读本科生;主要从事自动化与测控技术的研究。
