单斗液压挖掘机反铲装置动力学模型的建立
2014-05-25银光球林述温
银光球,林述温,张 宁
(1.福州大学 机械工程及自动化学院,福建 福州 350108;2.福建工程学院 机械与汽车工程学院,福建 福州 350108)
单斗反铲液压挖掘机主要是以一个铲斗进行挖掘作业的工程机械,它由反铲装置、上部转台和行走装置三大部分组成.其中反铲装置的受力十分复杂,其动力学模型属于多体系统动力学研究范畴,包括动力学正解和逆解的计算,它可为机构的优化设计及控制提供理论依据[1-3].典型的动力学研究方法主要有Lagrange法、Newton-Euler法、Kane法以及变分法等.其中基于虚功原理的Lagrange法是以系统的动能和势能建立的,其推导过程比较简便,并且总能得到形式较为简洁的动力学方程,既能用于系统动力学模拟,又能用于动力学控制,而且还能清楚地表示出各构件的耦合特性.白志富等[4]利用Lagrange法讨论了一种3-HSS并联机构在工作空间内的动力学方程,得出了其显式解,并结合实例对各滑块的驱动力进行了计算机仿真.陈纯等[5]采用Lagrange方法建立了VC80混联机床两自由度并联机构封闭形式的逆动力学模型.高征等[6]采用Lagrange法对一种三自由度串并联旋转台进行了动力学分析,建立了系统的动力学模型,并给出了动力学的仿真运算实例.
在不考虑回转自由度的情况下,挖掘机反铲装置是一个三自由度的并联机构,可以实现各种复杂的挖掘动作.孙旭国等[7]采用Newton-Euler法建立了挖掘机工作装置的动力学模型,并结合实例对模型进行了验证;FOX等[8]也采用Newton-Euler法建立了挖掘机系统动力学模型.但是采用Newton-Euler法建立多体系统动力学模型,需要对系统中的每个杆件进行运动和受力分析,分别建立Newton-Euler动力学方程,然后再综合求解,得到系统的运动微分方程,整个过程繁琐复杂,极易出错.本文采用基于虚功原理的Lagrange法建立了挖掘机反铲装置的多刚体动力学模型,可以避免繁琐的运动和受力分析过程.同时,为了验证模型的正确性,将动力学模型的求解结果与ADAMS软件给出的相同参数反铲装置的动力学仿真结果进行对比.
1 挖掘机反铲装置的动力学模型
1.1 反铲装置的动力学拉格朗日方程
挖掘机反铲装置由动臂机构、斗杆机构和铲斗机构组成,如图1所示.为使问题分析简化,去掉动臂液压缸、斗杆液压缸和铲斗液压缸,代之以随时间变化的净驱动力矩Ti(i=1,2,3,…),忽略动臂、斗杆和铲斗的具体形状,用简单的线条表示,将各自的等效质量mi放置在各自的质心位置,则反铲装置可以简化为图2所示的多杆动力学模型.
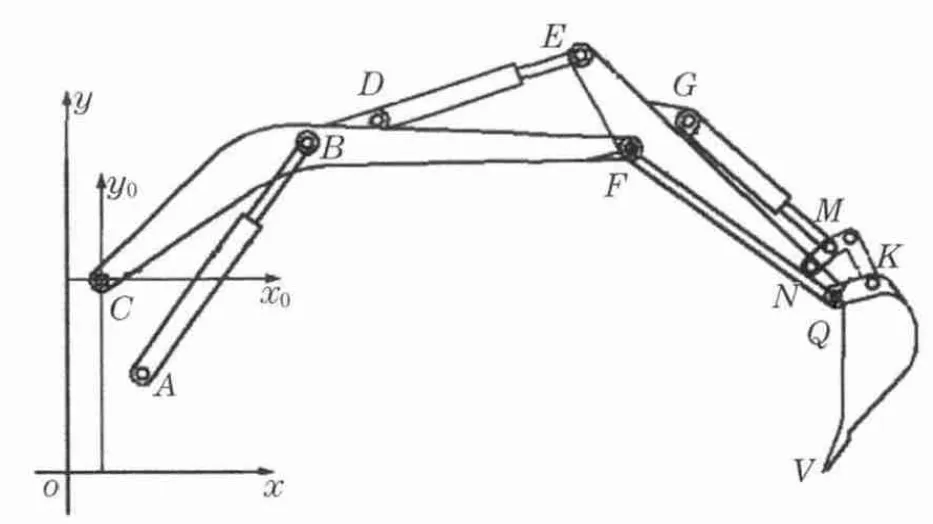
图1 挖掘机反铲装置Fig.1 Excavator backhoe device
图2中,mi为各构件的等效质量;θi为各关节的初始角度;li为各构件质心到相应关节点的长度;βi为各构件的质心到相应连杆的角度;Ti为施加在各关节的驱动力矩;g为重力加速度.ai为各连杆的长度.
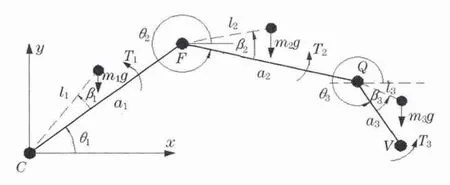
图2 反铲装置动力学原型Fig.2 Dynamics model of backhoe device
根据图2所示的动力学模型,挖掘机反铲装置的拉格朗日函数定义为

式中:L为拉格朗日函数为关节变量的角位移;为关节变量的角速度;为反铲装置所有构件的总动能;P(Θ)为反铲装置所有构件的总势能.
则反铲装置的拉格朗日方程为

式中:t为时间.
1.2 计算反铲装置的总动能、总势能和净力矩
K是反铲装置所有构件的总动能,可表示为构件的平动动能和转动动能之和.

式中:vc为构件的质心速度列阵,vc=为各构件的质心速度;M为构件的质量矩阵,为构件的角速度列阵为各构件的角速度;I为构件的主惯性矩阵,I=diag为各构件的主惯性矩.
P是反铲装置所有组件的总势能,可表示为

式中:m为构件的质量列阵,m=为构件质心高度列阵,Hc=为各构件质心的高度.
T为作用在关节上的净力矩列阵,T=可表示为

式中:Tg为各油缸对相应关节点产生的驱动力矩为动臂油缸对关节点C的力矩;Tg2为斗杆油缸对关节点F的力矩;Tg3为铲斗油缸对关节点Q的力矩;TL为外部负载在各关节点产生的等效阻力矩列阵,TL=为负载对关节点C的等效阻力矩;TL2为负载对关节点F的等效阻力矩;TL3为负载对关节点Q的等效阻力矩.
1.3 反铲装置的动力学模型
将式(1)代入式(2),经推导得到挖掘机反铲装置的动力学模型:

式中:K(是K(Θ)的简写)为总动能;P(是P(Θ)的简写)为总势能;为关节变量的角加速度.

将式(7)展开得到:

式(8)为挖掘机反铲装置的动力学模型,是关于关节变量Θ的二阶微分方程.
2 动力学模型的求解及实例验证
对于式(8)这个二阶微分方程组的解法可参考文献[9],本文利用四阶龙格-库塔法进行积分运算求解.求解式(8)的初始条件见表1.表中为各关节的初始角速度,Iizz为各构件的转动惯量.
为了验证本动力学模型的正确性,用ADAMS建立了挖掘机反铲装置的虚拟样机,如图3所示.

图3 挖掘机反铲装置虚拟样机Fig.3 Virtual prototype of excavator backhoe device

表1 反铲装置动力学参数Tab.1 Kinetic parameters of backhoe device
然后利用MATLAB软件编写了四阶龙格-库塔算法程序,对式(8)在一定的时间内进行数值求解,得到在净力矩T的作用下关节变量的角加速度、角速度和角位移Θ随时间变化的曲线,如图4所示.同时,为了验证本动力学模型的正确性,以表1的参数在ADAMS中建立了挖掘机反铲装置的虚拟样机,如图3所示,以相同的净力矩作用到相应的关节上,进行动力学仿真计算,也得到了关节变量的角加速度、角速度和角位移Θ随时间变化的曲线.然后将两种曲线图进行叠加对比,如图4所示.
从图4可见,由动力学模型求得的曲线与用ADAMS软件仿真得到的曲线大致吻合,误差都在工程允许的5%范围内,从而验证了所建动力学模型的正确性和有效性.其中误差存在的原因可能是:①动力学建模误差;②数值求解误差;③数字化建模误差.

图4 曲线比较Fig.4 Curve comparison
3 结论
(1)在分析研究挖掘机反铲装置动力学的基础上,采用Lagrange法建立了挖掘机反铲装置的动力学模型,该动力学模型可以用于求解动力学正、逆问题以及正逆混合问题;
(2)用MATLAB编写了四阶龙格-库塔算法程序,用于对动力学模型进行数值求解,得到了反铲装置各个关节的角位移、角速度和角加速度曲线.在ADAMS中,采用相同参数建立了挖掘机反铲装置的虚拟样机,在各个关节上加载相同的负载和驱动力矩进行动力学仿真,也得到了反铲装置各个关节的角位移、角速度和角加速度曲线.然后,将相应曲线进行叠加对比,发现通过动力学模型求得的曲线与仿真得到的曲线基本吻合,误差都在5%以内,从而验证所建动力学模型的正确性和有效性.
(3)挖掘机反铲装置动力学模型是反铲装置实现自动控制、轨迹规划以及优化设计的基础,同时动力学模型还可求解反铲装置在各种负载、运动状态下的运动副动反力,作为挖掘机反铲装置结构设计和分析的依据,对提高国产挖掘机的设计水平具有重要的意义.
[1]ZWEIRI Y H,SENEVIRATNE L D,ALTHOEFER K.A generalized newton method for identification of closed-chain excavator arm parameters[C]∥Proceedings of the 2003IEEE International Conference on Robotics and Automation,New York:IEEE,2003:103-108.
[2]CASOLI P,ANTHONY A.Gray box modeling of an excavator’s variable displacement hydraulic pump for fast simulation of excavation cycles[J].Control Engineering Practice,2013,21(4):483-494.
[3]TIWARI R,KNOWLES J,DANKO G.Bucket trajectory classification of mining excavators[J].Automation in Construction,2013,31(5):128-139.
[4]白志富,韩先国,陈五一.基于Lagrange方程三自由度并联机构动力学研究[J].北京航空航天大学学报,2004,30(1):51-54.BAI Zhifu,HAN Xianguo,CHEN Wuyi.Study of a 3-DOF parallel manipulator dynamics based on Lagrange’s equation[J].Journal of Beijing University of Aeronautics and Astronautics,2004,30(1):51-54.
[5]陈纯,黄玉美,韩旭炤.混联机床并联机构的逆动力学分析[J].中国机械工程,2009,20(7):784-788.CHEN Chun,HUANG Yumei,HAN Xuzhao.Inverse dynamics analysis of parallel mechanism of hybrid turning-milling machine tool[J].China Mechanical Engineering,2009,20(7):784-788.
[6]高征,肖金壮,王洪瑞,等.一种三自由度串并联结构旋转台的动力学分析[J].中国机械工程,2012,23(1):18-21.GAO Zheng,XIAO Jinzhuang,WANG Hongrui,et al.Dynamics analysis on a 3-DOF rotational platform with serial-parallel structure[J].China Mechanical Engineering,2012,23(1):18-21.
[7]孙旭国,黄孙灼,林述温.液压挖掘机工作装置动力学建模与分析[J].建筑机械化,2007(7):33-37.SUN Xuguo,HUANG Sunzhuo,LIN Shuwen.Modeling and analysis of hydraulic excavator mechanism dynamics[J].Construction Mechanization,2007(7):33-37.
[8]FOX B,JENNINGS L S,ZOMAYA A Y.On the modeling of actuator dynamics and the computation of prescribed trajectory[J].Computers and Structures,2002,80(7):605-614.
[9]刘延柱.多刚体系统动力学[M].北京:高等教育出版社,1989.LIU Yanzhu.Multiple rigid-bodies system dynamics[M].Beijing:Higher Education Press,1989.