激光标记自动跟踪视频引伸计的标记识别算法研究
2014-05-25谢森栋田秋红孙政荣张立见
谢森栋,田秋红,孙政荣,张立见
(浙江理工大学精密测量技术实验室,杭州 310018)
激光标记自动跟踪视频引伸计的标记识别算法研究
谢森栋,田秋红,孙政荣,张立见
(浙江理工大学精密测量技术实验室,杭州 310018)
针对视频引伸计易受光照变化干扰的问题,提出一种基于图像亮度调整和去雾增强相结合的图像预处理算法,获得了激光标记和试样标记的清晰图像;分别利用Cr色度阈值分割算法和基于感兴趣区域的亮度梯度阈值分割算法提取激光标记和试样标记。在光照变化和有无试验机夹头干扰的情况下分别进行了实验,验证了算法的稳定性和准确性。
视频引伸计;图像处理;数学形态学增强;Cr色度;亮度梯度
0 引 言
视频引伸计测量材料应变时,一般预先在试样上制作标记,通过图像测量技术[1]对CCD采集的图像进行预处理、标记提取、计算被测试样的实时形变量。边缘检测[2-4]和模板匹配[5-7]是最常用的图像目标特征提取方法,但对实验光照条件要求高,适应性差。目前,在数字图像处理领域中解决光照问题主要是通过图像亮度补偿来实现:直方图均衡化[8]能有效增强图像对比度,却容易受背景噪声干扰;Gamma校正[9],通过改变Gamma参数来控制一幅图像的整体亮度,但容易造成图像失真;非线性变换[8-9],采用像素值的对数变换来达到增强图像的目的;同态滤波[10],根据光照反射理论,通过傅里叶变换在频域内对图像亮度范围进行压缩的同时增强图像的对比度。非线性变换和同态滤波计算量大,不满足测量系统实时性要求。上述方法都是通过直接提取试样标记来获取试样形变量,未考虑测量过程中试样标记变形问题,引入了测量误差。而基于激光标记自动跟踪测量材料变形的方法利用形状稳定的激光标记跟踪试样标记,采用连图算法提取激光标记实现材料形变测量,消除了试样标记变形引入的误差[11],但该方法在光照变化复杂情况下存在标记提取的准确率下降的问题。本文在此基础上,设计了一种对光强变化具有强鲁棒性的预处理算法,描述了激光标记自动跟踪视频引伸计的结构和测量原理,详细阐述了该视频引伸计的图像预处理算法和标记识别算法,并设计了算法流程图,最后进行了实验验证。
1 系统结构
激光标记自动跟踪视频引伸计的结构如图1所示,LD激光器发出的光束通过十字分划板产生“+”字形激光标记,经五角棱镜和平面镜两次反射,射向被测试样;CCD获取激光标记和试样标记的图像,经图像采集卡传输给计算机,由图像处理算法获得激光标记和试样标记的距离差,控制伺服电机带动五角棱镜转动,使激光标记实时跟踪试样标记,获得试样变形量。
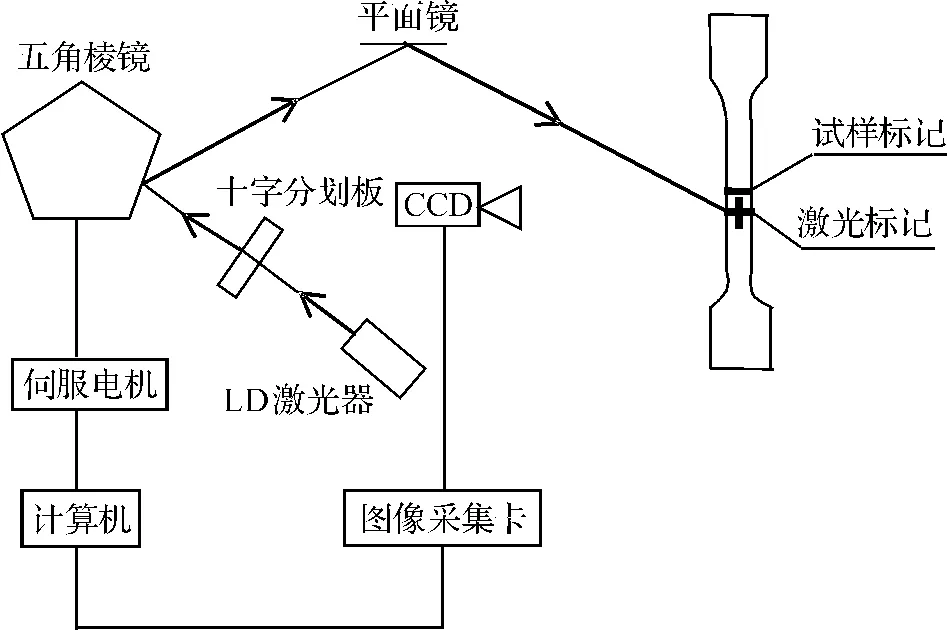
图1 激光标记自动跟踪视频引伸计的结构
2 图像预处理
2.1 基于图像统计信息的线性亮度调整算法
由于实验光照环境不稳定,CCD采集的试样图像中试样区域和背景区分度低,影响激光标记和试样标记的准确识别。因此,本文提出基于图像统计信息的线性亮度调整算法对CCD采集到的试样图像的亮度进行调整,改善试样图像整体亮度。对于大小为N×M的试样图像,基于图像统计信息的线性亮度调整算法具体实现如下:
a)在实验室环境中,利用CCD采集50幅光照强度不同对应的试样图像,从中选取标记突出的一幅试样图像,分别利用公式(1)和公式(2)计算:I= 140,RGB三通道均值(135,165,130),并将此RGB均值作为图像亮度调整的参考标准。

b)统计试样图像中RGB三通道像素均值

式(2)中:avg_r,avg_g,avg_b则表示实时采集的试样图像中RGB的统计平均值。
c)根据实时采集的试样图像统计信息,计算RGB三通道亮度调整算子

式(3)中:gain_r,gain_g,gain_b分别为三通道的亮度调整算子;(135,165,130)为预先获得的亮度调整参考点。
d)遍历试样图像,利用实时计算得到的亮度调整算子修正像素值
式(4)中:R,G,B分别为原试样图像上一像素点的RGB值;R′,G′,B′分别表示修正后试样图像中与之相对应像素点的RGB值。
为保证获取完整试样图像且尽量减少外界环境干扰,实验时采集的图像大小设置为600*256。对CCD采集到的图像(如图2(a))使用上述算法后,改善了试样图像清晰度,为后续图像处理提供亮度稳定的试样图像,实验结果如图2(b)所示。
基于图像统计信息的线性亮度调整算法结果
2.2 基于数学形态学的图像去雾增强算法
由图2可知,利用线性图像亮度调整算法后,虽然试样图像整体亮度得到改善,但其表面对比度不高,覆盖了一层“薄雾”。为了后续能有效提取激光标记和试样标记,需要对亮度调整后的“带雾”图像进行图像去雾增强处理,提高图像对比度。本文选用数学形态学中基于Top-Hat变换[12]的对比度拉伸方法进行图像去雾增强处理。
数学形态学中,高帽变换能有效检测出图像中的亮点,是一种波峰检测器;与之对偶的低帽变换则适合于检测图像中的暗点,它们分别定义如下:

式(5)、式(6)中:top和black分别表示高帽变换和低帽变换,A表示原试样图像,B表示结构算子,A◦B和A·B分别为开运算和闭运算。
试样图像中激光标记区域亮度高,而试样标记区域亮度低,结合高帽变换和低帽变换的性质,可通过对原试样图像中激光标记区域的像素点增强亮度而对试样标记区域的像素点进一步减弱亮度,从而达到提高图像对比度的目的:式(7)中:A′表示对比度增强后的试样图像,A表示CCD实时采集的原始试样图像,其实验结果如图3所示。


学形态学的图像去雾增强算法实验结果
图3(c)和图3(a)、3(b)相对比,消除了图像中亮度调整处理后带来的“薄雾”效果,试样图像清晰度进一步增强,两标记区域和图像其它部分的对比度得到了改善,图像特征突出。因此,经上述预处理算法处理后,试样图像清晰、标记突出,为后续准确提取标记提供了保证。
3 标记识别
3.1 自适应Cr色度阈值分割算法提取激光标记
在RGB颜色空间中,三分量值都同时包含了色度信息和亮度信息,其欧氏距离无法有效表示任意两种颜色间的视觉差距,因此在RGB颜色空间中使用R分量进行阈值分割将不能有效地提取出激光标记。而YCbCr颜色空间将色彩的亮度与色度分离,用Y表示亮度,Cb和Cr分别表示蓝色色度和红色色度,因而可以用色度的欧氏距离来评估颜色差别。从RGB空间到YCbCr空间的转换公式如下:
为了保证Y、Cb、Cr都为正值,式(8)中需要预先对R、G、B进行归一化,使得R、G、B均属于[0,1],此时有 Y、Cb、Cr均属于[16,235]。对图3(c)进行颜色空间转换,Cr色度分量的分布如图4所示,三维图像中垂直方向表示图像中各像素点处的红色色度分量值,由图4可知,红色色度分量仅在激光标记区域产生峰值,其它部分分布平坦,故利用Cr分量设置阈值可有效分割出激光标记区域。自适应Cr色度阈值分割提取激光标记算法如下:
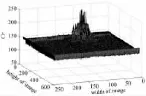
试样图像红色分量分布图
a)根据公式(8)将预处理后的试样图像转换到YCbCr颜色空间中表示。
b)统计试样图像中Cr分量信息,计算平均值avg _Cr,并寻找试样图像中Cr分量的最大值max_Cr。
c)设置自适应阈值th_Cr。由图4,试样图像中激光标记区域占整幅图像的比例很小,即激光标记区域的Cr分量值对计算avg_Cr的权重小,故avg_ Cr将接近背景区域的Cr值,单纯利用Cr均值进行图像分割容易引入噪声点,因此本文选择综合考虑avg_Cr和max_Cr来设置自适应阈值th_Cr,具体计算如下式所示:

d)根据阈值th_Cr对图像进行分割:对试样图像中任意点(x,y),若Cr(x,y)≥th_Cr,则认为该点属于激光标记区域;否则,排除该点。
3.2 基于图像感兴趣区域试样标记提取算法
由于试验机夹头和试样标记在图像中均表现为黑色,如果CCD视场中引入了夹头,将无法利用试样图像的亮度梯度变化来准确提取试样标记。由激光标记自动跟踪视频引伸计的测量原理可知,激光标记在实验过程中实时跟踪试件标记,两者间的距离远小于激光标记与试验机夹头间的距离,因此可利用上述提取的激光标记位置来获得一个仅包含试件标记和激光标记的感兴趣图像区域,在此局部区域内利用图像亮度梯度提取试样标记,具体实现过程如下:
a)根据激光标记位置,获取一个仅包含两种标记的图像局部区域A′作为感兴趣图像区域。
b)对区域 A′中每一列进行遍历,用 Ri,j,Gi,j,Bi,j分别表示在像素点(i,j)处RGB三分量的值,I[i,j]表示在像素点(i,j)处的亮度,grad[i,j]表示在像素点(i,j)处的亮度梯度,并记录该列中梯度变化的极值点位置,用map[i,j]=1表示。其中亮度I[i,j]和亮度梯度grad[i,j]的计算公式如下,
c)由于噪声点也可能产生梯度变化的极值,需要设置阈值对其进行排除:首先统计A′中每一行标记为map[i,j]=1的点的个数,记为count[i]。然后,寻找count[i]中的最大值,记为MAX。由于噪声点是孤立的,而试件标记边缘是连续的,即试件边缘处map标记点的个数要远大于噪声点处,因此可设置阈值TH=0.5×MAX,当count[i]≥TH,则认为该行被标记部分属于试件标记区域;当count[i]<TH,则该行被标记部分不属于试件标记区域,map[i,j]=0。
d)对map[i,j]=1位置处的像素值设置为绿色,表示该点属于试件标记。
4 图像处理算法流程图
综上所述,激光标记自动跟踪视频引伸计的数字图像处理流程如图5所示,通过图像线性亮度调整和图像去雾增强算法获得预处理图像;由自适应Cr色度阈值分割提取激光标记算法提取激光标记,与此同时获取一个仅包含激光标记和试样标记的感兴趣区域,在此区域内利用试样标记提取算法获得试样标记;求取两标记各自的中心位置,计算其欧式距离并控制电机实现激光标记对试样标记的实时跟踪。
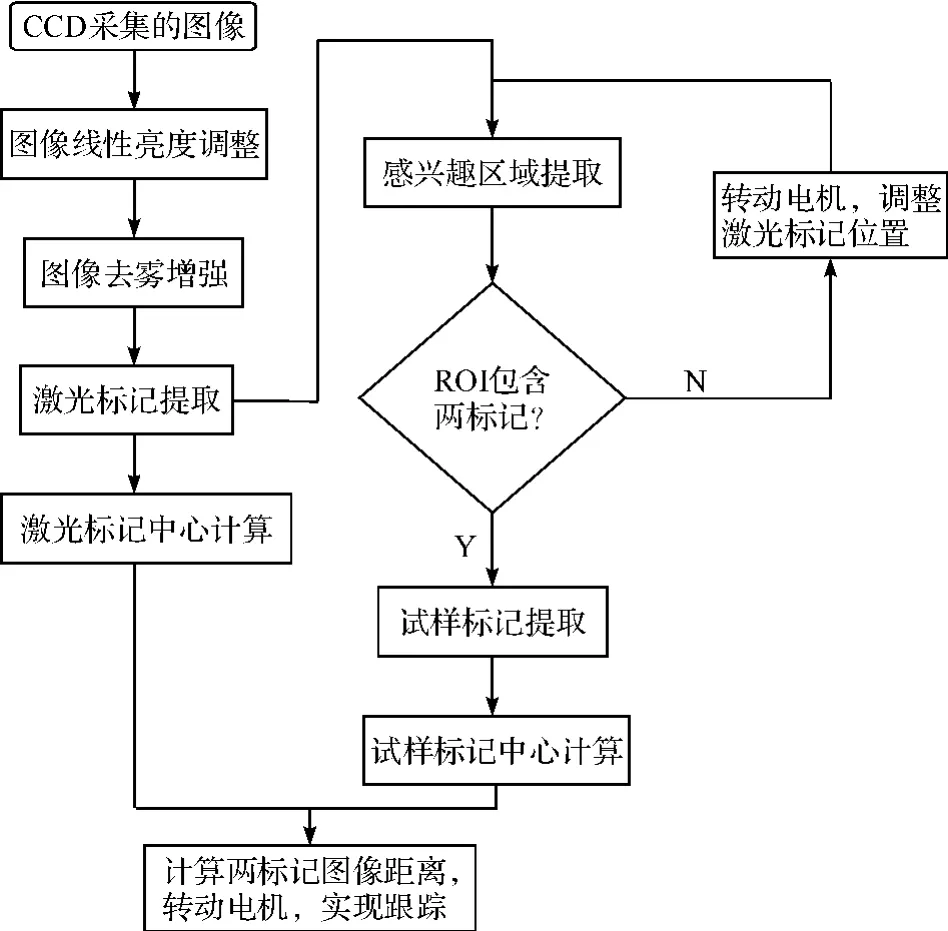
图5 激光标记自动跟踪视频引伸计的数字图像处理流程
5 实验结果及讨论
为了验证算法的有效性和稳定性,搭建如图1所示的视觉测量系统,选用嘉恒中自公司的图像采集卡(OK_RGB20B)和CCD(OK_AC1300)采集试样图像,实验采集的图像大小设置为600*256,分辨率为10/65=0.15(mm/pixel),系统采样周期为60 ms。在联想ThinkCentre M6100 t(双核,2.93 GHz,内存2GB)计算机上实现本文算法所需时间在50 ms以内,小于试验机采样周期60 ms,满足测量过程的实时性要求。

6 I=75,无夹头干扰

7 I=128,无夹头干扰

8 I=168,无夹头干扰

9 I=73,有夹头干扰

10 I=132,有夹头干扰

11 I=175,有夹头干扰
第一组实验利用低碳钢验证标记识别算法的稳定性。在进行拉伸实验前,保持试样标记和激光标记空间位置不变,在不同光照条件下(光强由公式(1)计算得到)对试样图像重复进行标记提取,结果如图6-图11所示。分别计算这六组实验中激光标记和试样标记在图像中的中心坐标(以像素为坐标),在无夹头干扰的情况下,当光强I=75时,激光标记在图像中的坐标为(101.24,393.68),试样标记坐标 (101.51,421.13);当光强I=128时,激光标记坐标(100.45,394.09),试样标记坐标(100.48,421.51);当 I= 168时,激光标记坐标(100.68,394.12),试样标记坐标(102.23,421.48);在有夹头干扰的情况下,当I=73,时,激光标记坐标(99.68,393.75),试样标记坐标(100.43,421.08);当I=132时,激光标记坐标(100.18,394.01),试样标记坐标(102.23,421. 29);当I=175时,激光标记坐标(98.68,393.83),试样标记坐标(101.13,421.38)。实验结果表明,在不同光照环境和有无试验机夹头干扰的情况下,标记识别算法稳定性高且标记误差小于0.5个像素(约0.5*0.15=0.075 mm)。
第二组实验分别利用50根低碳钢和50根铸铁验证标记识别算法的准确率。在50组低碳钢拉伸实验过程中有48组能准确识别标记;50组铸铁实验中有45组能准确识别标记。图12所示为一组激光标记跟踪试样标记序列。实验结果表明,本算法在试样拉伸实验过程中标记识别准确率为93%。

图12 激光标记跟踪序列
6 结 语
图像处理算法是实现高精度视频引伸计开发的关键,本文先利用亮度修正和图像增强对CCD采集到的试样图像进行预处理,提高试样图像清晰度;然后由自适应Cr色度阈值分割算法标记提取算法获得激光标记,在此基础上获取一仅包含激光标记和试样标记的感兴趣区域,并利用试样标记提取算法提取试样标记,最后在光照变化和有无试验机夹头干扰的实验条件下分别进行实验,实验结果表明,本文设计的算法能快速准确地提取激光标记和试件标记,降低测量系统对实验光照条件的要求,对促进视频引伸计的发展具有积极意义。
[1]周万志.高精度图像测量技术研究[D].西安:西安电子科技大学,2009.
[2]王占富,谢丽萍.非接触式视频应变测量系统设计[J].工具技术,2011,45(8):91-94.
[3]张英杰.基于视频图像的应变精密测量研究[D].长春:吉林大学,2006.
[4]Tabatabai A J,Mitchell O R.Edge location to subpixel values in digital imagery[J].IEEE Trans on Pattern Analysis and Machine Intelligence,1984,6(2):188-201.
[5]戴晓光.基于数字图像处理的应变测量研究[D].武汉:华中科技大学,2006.
[6]毛霜霜,吴 佳.基于数字图像相关方法的光学引伸计系统开发[J].实验技术与管理,2013,30(2):74-77.
[7]熊 磊.基于数字图像相关方法的材料拉伸变形测量技术[D].长春:吉林大学,2012.
[8]刘海波,沈 晶,郭 耸,等.Visual C++数字图像处理技术详解[M].北京:机械工业出版社,2010:138-145.
[9]张秀敏.视频图像应变测量中解决光照问题的相关措施研究[D].长春:吉林大学,2008.
[10]Seow M J,Asari V K.Ratio rule and homomorphic filter for enhancement of digital colour image[J].Neurocomputing,2006,69:954-958.
[11]Tian Q H,Du X,Liu Y N,et al.Image processingmethod and implementation for a laser automatic tracking extensometer[C]//2012 International Workshop on Image Processing and Optical Engineering.Bellingham:Proc of SPIE,2012,8335.
[12]Bradski G,Kaehler A.学习OpenCV[M].北京:清华大学出版社,2009:134-145.
Study on Mark Recognition Algorithm of Laser Mark Automatic Tracking Video Extensometer
XIE Sen-dong,TIAN Qiu-hong,SUN Zheng-rong,ZHANG Li-jian
(Precision Measurement Laboratory,Zhejiang Sci-Tech University,Hangzhou 310018,China)
Aiming at the problem that conventional video extensometers are usually susceptible to light changes,this paper comes up with an image preprocessing algorithm based on combination of image brightness adjust-ment and defogging enhancement.Through such algorithm,the clear image with lasermark and specimen mark can be obtained.The laser mark and samp le mark can be extracted through Cr chrom inance threshold segmentation algorithm and brightness gradient threshold segmentation algorithm based on area of interest.The experiments are carried out respectively under light changes and chuck interference of testmachine to verify the stability and accuracy of the algorithm.
video extensometer;image processing;mathematicalmorphology enhancement;Cr chrom inance;gradient of brightness
TP391.41
A
(责任编辑:陈和榜)
1673-3851(2014)02-0195-06
2013-09-09
浙江省自然科学基金项目资助(Y1110538);国家自然科学基金项目资助(90923026)
谢森栋(1988-),男,浙江富阳人,硕士研究生,主要从事计算机测控技术方面的研究。
田秋红,tianqiuhong@zstu.edu.cn
