三维激光扫描技术在滑坡物理模型试验中的应用
2014-05-18马俊伟唐辉明胡新丽宋友建
马俊伟,唐辉明,胡新丽,雍 睿,夏 浩,宋友建
(中国地质大学 工程学院,武汉 430074)
1 引 言
滑坡物理模型试验是对滑坡形成机制、发展演化过程、破坏机制、滑坡与防治工程相互作用等方面研究的重要技术手段。目前,国内外学者开展了大量的滑坡物理模型试验研究工作[1-6]。
物理模型试验中常用的变形监测方式大致可分为:机械法、电测法、光测法[6]3类。机械法和电测法是在模型表面安装百(千)分表,内部埋设传感器。百(千)分表只能测量小范围的位移量。电阻应变片对材料的弹性模量要求较高,抗电磁干扰性能差,传送距离短。光纤传感器[7-9]近来发展迅速,但是其存在可靠性问题:光纤传感器在将光信号转化为位移过程中受到外部因素的影响,若未考虑试验环境的影响,测量结果不可靠;发生较大位移时,光纤容易断裂;传感器与试验体接触,对模型的物理性质产生影响。以上方法都存在同一个问题,即测点有限,通常只能对重点部位进行监测,难以发现无监测点区域的变形情况,不能全方位反映模型的变形情况,监测点一旦破坏会严重影响监测的连续性。自动网格法[10-11]是近来发展较快的一种非接触式光学测量方法,其测量对网格点的制作要求高、图像处理工作量大、对光照条件要求高、空间分辨率差。数字化近景摄影测量技术[12]进行监测时现场光照条件对像点坐标的量测有较大影响;为了提高测量精度,一般需要多站摄影,且现场需要布设像控点,准备工作复杂。
三维激光扫描以格网扫描方式,免棱镜地测量地表点,瞬时获得空间三维坐标信息,能够快速建立复杂曲面的可视化物理模型,从三维角度精细反映物体的变形特征。国内外学者开展了一系列三维激光扫描在地面变形、滑坡、隧道开挖、海岸防护堤、水电站闸门变形监测中的应用研究[13-19]。考虑到三维激光扫描技术具有“无合作目标测量”特点,徐进军等[14]通过拟合法和重心法分别对滑坡物理模型试验和野外滑坡中的监测块点群数据进行了处理,通过获取监测块点群数据平均坐标计算变形。
三维激光扫描技术具有测量精度高、测量速度快、数据密度大、非接触测量等特点,扫描的点云数据能够详细描述模型表面的细部状况,所以将该技术应用到滑坡物理模型试验中具有显著的应用价值。本文将三维激光扫描技术应用于滑坡物理模型试验坡面变形监测中,简述了三维激光扫描的原理,通过数字仿真试验对点云数据变形处理方法进行了比较和评价,推导了点云数据单个扫描点的空间位置精度的评价模型,对点云密度进行了理论分析,通过抗滑桩加固滑坡模型试验实例,采用点云比较、重心法、点云叠加等方法测量模型的整体变形以及单个监测点的位移,对斜坡变形破坏过程进行了全面分析。
2 三维激光扫描在模型试验中应用
2.1 三维激光扫描原理
多数的扫描仪测距系统都是基于时间测量原理:三维激光扫描每一个扫描点可以得到测站到扫描点的扫描斜距r,根据扫描的水平方向角ϕ(自x轴正方向逆时针旋转至扫描方向在水平面内投影的夹角)、垂直方向角θ(仰角为正、俯角为负),进而推算每一扫描点与测站之间的三维空间相对坐标差。扫描仪近似方形,其扫描轴线(y轴)与主机侧壁平行,x轴与该侧壁垂直,z轴与仪器底面垂直。在以扫描仪仪器内部的局部坐标系统oxyz(见图1)下,任意一扫描点O的三维坐标可以表示为

图1 几何关系示意图Fig.1 Sketch map of geometric relationship
2.2 滑坡模型试验点云数据处理
2.2.1 点云数据变形测量
三维激光扫描获得的直接数据为密集的单个扫描点的集合,称之为点云(point cloud)。单个扫描点的信息包括:三维坐标(x,y,z)和反射强度i。一般需要用专门软件对点云数据进行如下操作:
(1)噪声去除 删除远远大于扫描设定范围的物点和不属于研究物体本身的其他物体的点。
(2)标靶定位 利用软件自带的标靶识别功能完成对标靶的定位,用于点云配准或点云地理定位。
(3)点云配准 将每站扫描坐标系下的点云数据转换至同一坐标系下。
(4)点云简化 海量的点云数据进行简化,尽可能用最少的点达到最好的描述效果。
(5)变形测量 点云数据常用的变形测量方式有:点云叠加、点云比较、重心法、拟合法。
①点云叠加 将点云数据建立数字地形模型,把不同时期的模型叠加在一起,并赋予不同的颜色,根据数字地形模型可以分析斜坡演化过程,配合尺寸测量可以获得大致的变形量。
②点云比较 三维检测软件Geomagic Qualify、PolyWorks的IMInspect模块可以实现对点云数字化模型的三维比较分析,将对齐后的测试对象(点云数据、多边形数据、CAD模型)和参考对象(多边形数据、CAD模型等)进行直接比较,生成结果对象,并以三维彩色偏差图模型的形式呈现出来[20],其反映了整个模型各部分的变形趋势和变形量级。常用的比较类型有:最短距离和指定误差向量。最短距离给出的变形是从测试对象到参考对象上一点的最短距离。指定误差向量:沿一个用户定义的方向上从测试对象到参考对象的距离。
③重心法 主要处理形状不规则监测点的点群。具体处理过程为:人为选择监测点的边界,确定点群范围;设定反射强度阈值或者根据法向方向的一致性,得到筛选后的监测点点群;取坐标平均值,即得到监测点重心坐标;处理不同期次的重心坐标,得到监测点的位移。
④拟合法 主要适合于处理球体类或者圆形面的变形监测点的点云,这类监测点由人工布设。从众多的点云数据中识别并分离出坡面布置监测点的几何信息,通过拟合球体的球心或者圆形面圆心作为变形监测点。
2.2.2 变形测量数字仿真试验
设计、开展了数字仿真试验,对上述几种变形测量方式进行比较和评价。
(1)基准标靶生成
生成两种数字化标靶(圆形、球形),标靶的点云数据在空间上均匀分布。仿真试验中采用的标靶与常用的标靶具有相同的尺寸:r圆形=5 cm,r球形=3.81 cm。每个标靶的点云数量为10000,保证标靶具有充足的点云数据。
(2)试验标靶生成
对生成的数字化标靶沿固定方向(0.424,0.566,0.707)施加固定的位移量,生成两个新的试验标靶。以上标靶的生成在Matlab中实现。
(3)位移测量
采用上述的变形测量方式:点云比较(基于最短距离比较(MA)和指定误差向量比较(MB))、重心法(MC)、拟合法(MD)计算标靶的位移量(见表 1)。点云叠加配合尺寸测量方法,点的选择具有一定的偶然性在此不予研究。点云数据的处理和位移量的计算在三维检测软件 Geomagic Qualify中进行。

表1 不同测量方法位移量比较(单位: cm)Table 1 Displacement comparison between different measuring methods(unit: cm)
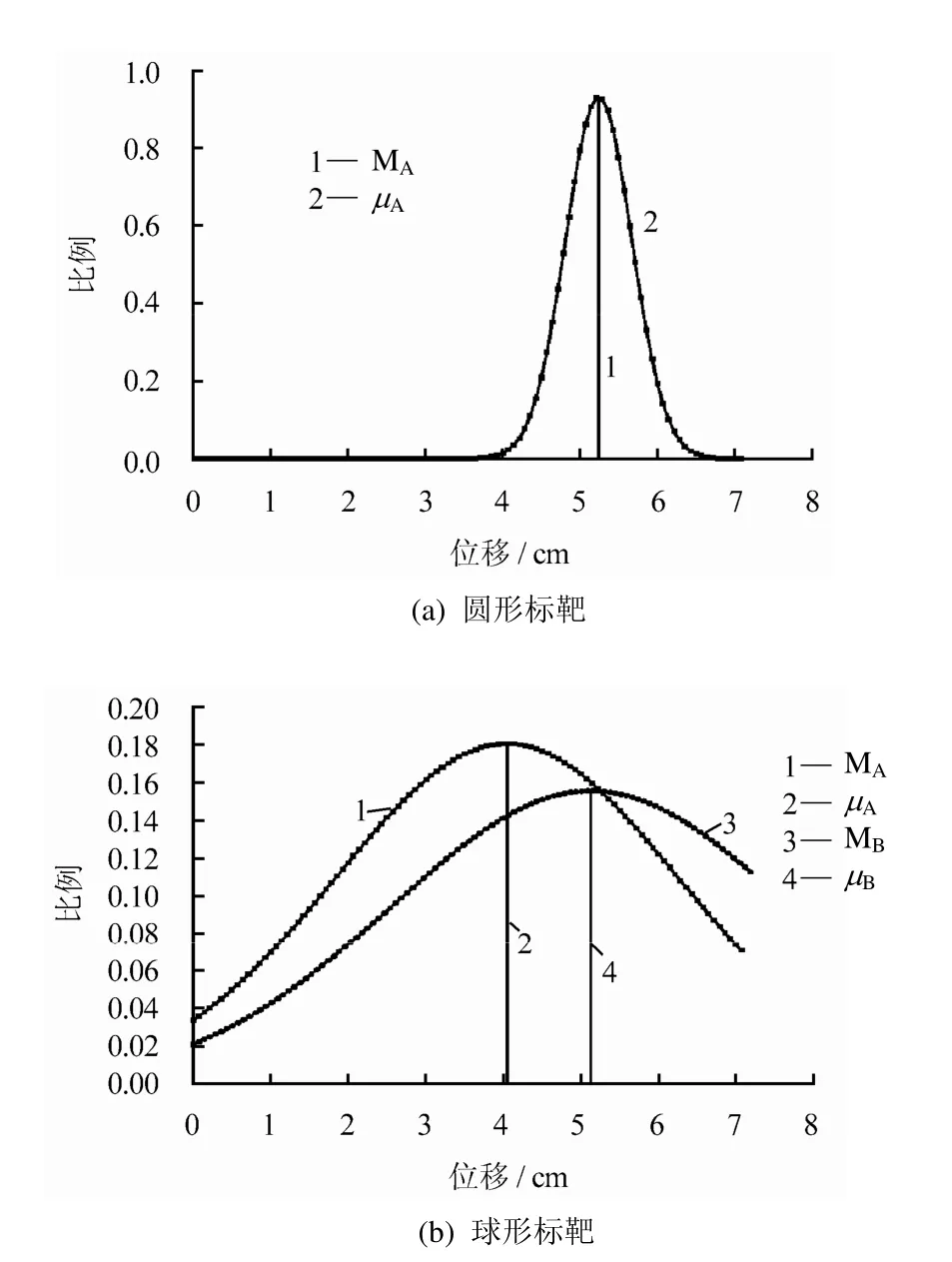
图2 不同计算方法位移量对比Fig.2 Displacement obtained by different calculation methods
由表1和图2计算的位移量可以看出:在点云数据充足的情况下,重心法、拟合法计算的变形量较真实值之间存在一定的差异,低估了标靶的变形量,但获得的变形量仍具有极高的准确性,相对误差仅为0.012%~0.044%;最短距离和指定误差向量的点云比较法测量的变形量准确性稍低,但可以得到整个标靶点云变形分布,而不仅仅是一个点的位移量。
点云叠加和点云比较主要基于面测量,监测点点云并不一定是一一对应关系;拟合法和重心法能够实现监测点的一一对应,等同于常规的特征点监测。点监测测量准确性相对较高,但只能够监测重点部位,难以发现无监测点区域的变形情况,不能全方位反映模型的变形情况,监测点一旦破坏会严重影响监测数据的连续性;而面测量可以详细描述模型表面的细部状况,测量准确性较点监测稍低。
基于三维激光扫描技术坡面监测是结合以上点测量和面测量的优势:通过点云叠加和点云比较获取坡面的变形趋势和变形量级,采用重心法或拟合法测量监测点准确的位移量,既能获得坡面的整体变形,又能对单个监测点的位移量进行准确测量。
2.3 三维激光扫描误差来源及精度分析
2.3.1 误差来源
地面激光扫描过程中误差一般包括仪器自身量测误差、与目标物体相关的误差和外界环境引起的误差3类[21]。与目标物体相关的误差主要是目标表面的反射率的影响;外界环境条件主要包括温度、湿度、气压、光照条件、振动等因素。
滑坡物理模型试验中扫描过程在一个相对稳定的室内环境中进行,认为地面三维激光扫描获取的点云数据的误差主要是由扫描仪自身的量测误差引起。根据三维激光扫描观测值的类型,将量测误差分为测距误差和测角误差。
2.3.2 单点空间位置精度
三维激光扫描获得最直接的测量数据是单个扫描点的三维坐标,因此,采用空间位置坐标的方差作为点云数据精度的评价指标。将式(1)利用泰勒级数展开,略去二次以上项,得到函数的线性表达式后应用协方差传播律[22],得到三维坐标的方差-协方差阵uuD :

对式(1)中各项分别求偏导,得

点云数据在x、y、z方向上的方差分量为

理论上,点云数据单点空间位置坐标的方差为

式中:β=90°−θ为入射激光与目标点的曲面法线所夹角度,定义为垂直扫描角度(见图1);σr为测距精度;σϕ为水平测角精度;σθ为垂直测角精度。
根据上述误差评价模型可对测站内点云的单个扫描点的点位精度进行评估,以后文模型试验中采用RIEGL VZ-400三维激光扫描仪为例(σr=2 mm(100 m距离处),σϕ和σθ为8.73× 10−6rad)可以获得测站内点位精度的云图(详见图3)。

图3 单点点位误差云图Fig.3 Nephogram of point positional error
由式(5)和图3可知,单个扫描点空间位置精度受到激光扫描仪的工作角度θ和扫描斜距r的影响,根据扫描仪的σr、σϕ、σθ、r,垂直角度θ就能得到单个扫描点空间位置坐标的方差;滑坡物理模型中的不同位置,具有不同的点位精度。仪器与目标点的r越小,激光光斑越小,回波信号也越强[23],空间位置坐标的方差越小,测量精度越高;反之,测量精度降低。垂直扫描角度β越小,则激光光斑越小,点间距越小,回波信号也越强,空间位置坐标的方差越小,测量精度越高;反之,测量精度降低。当β继续增大时,仪器将接收不到足够的回波信息,造成测量的失效,测量时应该予以避免。测站内精度最弱点位于激光扫描仪器的视窗边缘。
根据上述误差模型对测站内某些最弱点(激光扫描视窗边缘点)进行精度估计,从而决定其取舍,对于高精度的三维激光扫描变形监测,显得尤为重要。不但可以在测量后数据处理中根据最弱点精度来对采样点进行适当的取舍,而且扫描开始前可以根据预期要达到的精度、仪器视窗的大小及最弱点坐标精度估算,合理设计测量方案的技术细节。
张启福等[24]对RIEGL VZ-400的实际测距精度进行了评定,得到实际测距精度为0.6146 mm。三维激光扫描仪的单点定位精度,一般可以达到亚厘米级,其模型精度还要远高于这个精度[23]。当系统的单次量测精度为10 mm时,用最小二乘法生成的几何模型的精度可能达到2 mm[25]。加拿大多伦多大学的测量学者曾使用1′的全站仪和加拿大 Optech公司的ILTIS-3D激光扫描仪进行过对比试验,试验结果证明了两种测绘方式的测量结果基本没有差别。也就是说,三维激光扫描技术完全可以用来替代传统的仪器,如高精度的全站仪进行相应的变形测量。文中采用的 RIEGL扫描产品是基于时间测量原理(time-of-flight),这种原理的测距系统测距范围可以达到几百米,在大范围内的扫描测距精度相对稍低。当测量精度要求提高时可以采用基于相位测量原理(phase measurement)或者基于激光雷达或光学的三角测量原理(optical triangulation,laser radar)的扫描设备。
2.3.3 点云密度
三维激光扫描不仅关注单点空间位置误差的大小,而且更注重分析对象表面的精度[26]。点云要具有足够的分辨率才能提取物体表面的几何形状的细节特征。滑坡物理模型试验中需要高的分辨率来提取细节特征(裂缝、监测点)。平面分辨率主要与两个因素有关,即平面点密度和光斑在物体表面的尺寸,较高的平面点密度、较小的光斑尺寸可以获得较高的平面分辨率。获取监测点点群数据的重心坐标时对点群数据的坐标进行了平均化处理。理想情况下点群越密,平均化结果越好,拟合精度越高[27]。因此,点云数据面密度影响到点云数据的分辨率和点群数据重心的平均效果。
朱凌等[26]推导了计算点云密度的理论公式,并通过扫描试验验证点云密度与扫描距离和扫描角度的关系,证实了其正确性。
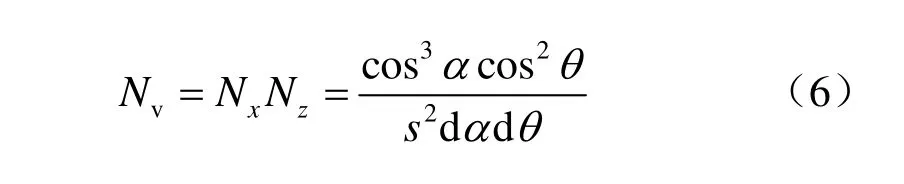
扫描距离为s,立面上点云数据密度为
水平面上点云数据密度为

式中:α=90°ϕ−定义为水平扫描角度(见图1);dα和dθ为扫描仪的垂直和水平角度步频率,为仪器常数,对于RIEGL VZ-400三维激光扫描仪仪器常数ddαθ==0.0024°;h为仪器高(见图1)。
图4给出了根据式(6)计算出的在垂直方向角θ=0°时不同的扫描距离和不同扫描水平角条件下立面内点云数据密度云图。由式(6)和立面上点云数据密度云图(图 4)可以看出,立面上点云数据的面密度随扫描距离的增大而迅速下降,与距离的平方成反比;随垂直角度增大,点云面密度下降并与垂直方向角θ余弦的平方成正比;随着水平扫描角度α的增大,点云数据面密度下降并与其余弦的三次方成正比。

图4 立面点云数据密度“云图”(θ=0°)Fig.4 Nephogram of point cloud density in vertical plan(θ=0°)
图5给出了根据式(7)计算出的在仪器高度h=2 m时不同的扫描距离和不同扫描水平角条件下水平面内点云数据密度云图。由式(7)和水平面上点云数据密度云图(图 5)可知,水平面上点云数据密度随着扫描距离s增大而急剧减小。水平面点云密度随扫描距离变化率大于立面点云密度随水平距离变化率,随水平扫描角度变化率小于立面点云密度随水平扫描角度变化率。
立面上点云数据密度公式(6)适用于计算滑坡物理模型中同主滑方向垂直的、坡度较大的滑体部分;水平面上点云数据密度公式(7)适用于滑坡物理模型中桩顶和滑坡前缘坡度较缓的滑体部分。
水平面上点云密度随扫描距离的变化较为明显,因此主要讨论水平面上点云数据面密度随扫描距离的变化。式(7)中取水平扫描角度α=0°,得到水平面上点云数据面密度随着扫描距离s的变化曲线(见图6)。随着s的增大,点云数据面密度急剧降低,逐渐趋于稳定,5 m以内保持着较高的点云面密度。
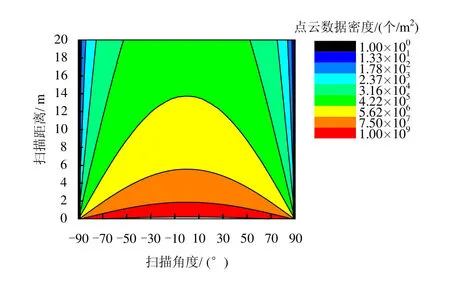
图5 水平面点云数据密度“云图”Fig.5 Nephogram of point cloud density in horizontal plan

图6 点云数据面密度随扫描距离s变化曲线Fig.6 Varying curve of point cloud surface density with scanning distance,s
立面上点云密度随水平扫描角度的变化较为明显,因此,主要讨论立面上点云数据面密度随水平扫描角度的变化。式(6)中取扫描距离s=5 m,得到立面上点云数据面密度的变化(见图 7)。当水平扫描角度α在[−90°,90°]变化时,点云密度先增大后减小,逐渐趋于稳定;当水平扫描角度α=0°时,点云密度取最大值,水平扫描角度在[−30°,30°]之间具有较高的点云密度。
由上述讨论可知,应用三维激光扫描技术进行滑坡物理模型变形监测时,对于模型表面的不同位置,其空间位置精度和点云密度都是不同的。因此,在模型试验中需要合理设计扫描的技术细节以获得较高的空间位置精度和点云面密度。
由关于单个扫描点空间位置坐标的精度讨论可知,在实际的扫描过程中,应该保持扫描斜距r取较小值;控制垂直扫描角度β的取值范围,使仪器接收到足够多的回波信息,避免造成测量的失效,以保证单个扫描点具有较高的空间位置坐标精度。

图7 点云数据面密度随水平扫描角度α 变化曲线Fig.7 Varying curve of point cloud surface density with horizontal scanning angle,α
由点云数据面密度关于扫描距离s和水平扫描角度的讨论可知,s在5 m以内,水平扫描角度α在[−30°,30°]内保持较高的点云密度。增加扫描距离,会使平面点密度下降,丢失大量的细节信息(如坡面的裂缝、监测点),背离采用三维激光扫描技术进行变形监测的初衷;同时会使光斑的尺寸变大,从而导致单点空间位置坐标精度的降低。还需要结合三维激光扫描仪的扫描视场范围和物理模型的尺寸综合确定水平扫描角度和垂直扫描角度,保证较高的点云密度和单点位置精度。
3 应用实例
开展滑坡-防治结构相互作用研究意义较大,将三维激光扫描技术应用于大型物理模型试验坡面变形监测中,取得了良好效果。
3.1 模型设计
3.1.1 模型制备与试验材料
物理模型试验设置在框架装置内,框架后部设置加载装置、前部设置反力装置。加载装置采用MTS-505.60电液伺服系统,该系统控制精度小于0.5%,可以对滑坡模型后缘推力进行精确控制。
滑坡模型长为200 cm,宽为90 cm,后部高度为115 cm,后部滑体厚度为41 cm,滑面倾角为15°左右。坡面后部稍陡,前缘呈现出“反翘”。滑坡物理模型主要由滑体、滑带、滑床和抗滑桩4部分构成。模型抗滑桩布设于物理模型的中后部位置。
滑床基岩较稳定,采用砖石砌体进行构筑,以砂浆抹面并辅以石膏薄层构筑坚固、光滑且透水性较弱的表面[6]。滑体和滑带的材料配比如表2所示。模型试验采用单排抗滑桩加固,共设置6根模型桩,截面尺寸为5 cm×7.5 cm,桩长为55 cm,嵌固段为20 cm,桩间距为10 cm。

表2 模型试验中坡体材料配比Table 2 Materials and mixing ratios of model test
3.1.2 荷载设计
模型试验在滑坡后缘采用分级加载方式,滑坡后缘推力第1级为500 N,之后逐级递增500 N等量施加,直至破坏。在每级荷载施加之后持续40 min,待结构受力和变形趋于稳定后施加下一级荷载。
3.1.3 监测方案设计
物理模型试验中坡面监测采用RIEGL VZ-400三维激光扫描系统。该系统激光发射频率高达3×105s,角分辨率为0.0005°,测距精度为2 mm(100 m距离处)。
试验前,在滑坡模型表面布设彩色工字钉作为变形监测点。三维激光扫描仪架设于物理模型前部,距离模型后缘约3 m。扫描分辨率为1 mm,每次坡面扫描耗时约 2 min。对滑坡模型初始状态进行一次扫描作为1期基准点云,试验过程中,每隔15 min对滑坡模型坡面进行一次扫描。截止试验结束共得到19期的试验点云数据。此次试验过程中,单次扫描即可获得全部的坡体信息。经过消除粗差和裁剪无关点云后,每期点云数据包含200多万个点的三维坐标信息。
3.2 试验结果分析
3.2.1 点云比较
将基准点云经过着色、裁剪、删除非连接项和体外孤点、减少噪声点后封装使点云对象转换为多边形模型,作为点云比较的参考对象。试验点云数据经着色、裁剪、删除非连接项和体外孤点、减少噪声点后以点云数据形式作为比较对象。将参考对象和测试对象统一到同一坐标系统下,通过沿最短距离计算模型之间的 3D偏差。获得整个坡面的位移场分布(见图8)。

图8 点云比较位移场结果(俯视)Fig.8 Displacement field by point to cloud comparison method(top view)
坡面位移场(见图8)具有以下特征:①以MTS压头中轴线为轴向大致呈对称分布,在桩后形成了微弱的地表土拱效应;②滑体滑动过程中由于同两侧的钢板和钢化玻璃产生摩擦效应,位移场的分布受到边界效应的影响,靠近钢板的一侧由于土压力盒引出线的影响,受边界效应影响较大,受影响区域约12 cm,靠近钢化玻璃的一侧受边界效应影响较小,受影响区域约8 cm。
前苏联 Malushitsky[28]研究了模型盒侧壁的摩擦妨碍作用对破坏土体的滑动面的影响,结果表明,在距离侧壁8~12 cm范围内滑动面带有明显的弯曲,而只有中间部分的土体的位移是最大且相同。与之本文获得的结论一致。因此,开展模型盒试验时需要对边界作减小摩擦处理,如:在内壁表面涂以油脂并用尼龙膜与模型隔开。减小摩擦的处理对试验结果是有益的,但仍然不能完全消除边界效应,试验结果仍然需要修正。
3.2.2 重心法
位移矢量场由位移矢量大小和方向两个因素共同构成的,位移速率主要体现单位时间内坡体的位移量的大小及其变化;位移矢量角是指位移矢量沿边坡主滑线上的倾角,它主要体现了边坡位移垂直空间的方向性,两者的大小及其变化规律均是边坡稳定状态的反映[29]。
模型试验过程中变形的主要区域集中在桩后的滑体部分,考虑到边界效应12 cm左右的影响范围,利用重心法提取桩后坡体上受边界效应影响区域外监测点重心,监测点的位置详见图 8。计算得到监测点的时间-位移曲线(见图9)和监测点的速率和位移矢量角(见表3)。图8对应时期采用重心法获得的监测点位移为:dJc1=4.19 cm,dJc2=4.13 cm,dJc3=4.53 cm;基于最短距离点云比较获得的监测点位移量为:d′Jc1=4.0 cm,d′Jc2=4.0 cm,d′Jc3=4.0 cm,2种方法获得的位移量较为接近。典型监测点的时间-位移曲线、变形速率、位移矢量角表明,监测点的运动由4个阶段组成。

图9 监测点时间-位移曲线Fig.9 Curves of time vs.displacement of monitoring points

表3 监测点位移速率与位移矢量角一览表Table 3 Displacement velocities and vector angles of monitoring points
AB段为初始蠕变阶段,变形在外荷载的作用下突然启动,变形速率约为 0.02~0.03 m/h,位移矢量角呈现处于随机、无序变化状态;BC段为挤压变形阶段,其速率基本维持在某一稳定值,变形速率约为 0.06~0.07 m/h,位移矢量角维持在一个相对稳定值;CD段为塑性变形阶段,变形速率增大,达到 0.22~0.25 m/h,剪出口位移矢量角出现趋势性减小;DE段为整体滑动阶段,变形速率达到1.69~1.85 m/h,剪出口位移矢量角出现明显趋势性减小,物理模型产生连续、快速、变化明显的整体滑动。
3.2.3 点云叠加
将基准点云数据和试验点云数据建立数字地形模型,叠加显示模型试验加载过程中基准点云和不同加载时期的坡面试验点云对坡体变形迹象进行分析(见图10)。

图10 滑坡模型坡面整体变形迹象对比Fig.10 Overall deformation of model surface of slope
如图10所示,试验初始阶段第1级荷载作用下滑坡模型处于蠕变阶段,推力作用下坡面点云与基准点云表现出随机、均匀分布的特点;推力作用下坡面与加载前坡面的几何形态基本重合;滑坡模型整体变形非常小;中部与前缘没有发生明显位移;坡面变形主要体现为后缘土体的蠕变,局部前移与隆起。
如图10所示,试验中期第5级荷载作用下滑坡模型处于挤压变形阶段,荷载作用下点云与基准点云已经出现了分离,点云具有向前、向上的运动趋势;试验中期滑坡模型坡面已经产生了一定的变形;坡体变形不断向模型的前部和两侧扩展,中部和前缘已经发生了一定前移;桩后滑体部分变形较桩前土体变形更为明显。
如图10所示,试验中后期第9级荷载作用下桩后土体变形向整体、趋势性滑移转化的塑性变形阶段转化,荷载作用下点云与基准点云已经产生了较大位移;滑坡模型坡面变形进一步向前扩展;桩前约10 cm范围内的滑体部分发生了明显的前移。
滑体临空面在由后向前的滑移过程中,前缘受到抗滑桩的阻挡,在阻挡部位产生压应力集中现象。随着滑移变形量不断增大,其变形和推力不断向前传递,无法继续前行的岩土体只能以隆胀的形式协调不断从后面传来的变形,并由此在坡体前缘产生隆起带,斜坡隆起的岩土体受中后部推挤力作用在横向上(垂直滑动方向)岩土体因弯曲变形而形成横向鼓胀裂缝(见图10)。
试验后期,隆胀裂缝在地表上形成基本圈闭的形态时,表明坡体滑动面已基本贯通,坡体整体失稳破坏条件已经具备,产生连续、快速的整体滑动位移,滑坡模型桩后土体达到整体滑动阶段,沿桩顶剪出破坏。
由于模型桩具有较大的刚度,每根模型桩所分担滑体体积也相应较大,桩的水平变形远远小于坡体变形,造成桩后局部范围内的土体不断挤压桩体,从而在桩间形成挤密土拱,导致模型桩后侧坡体发生局部开裂,产生局部剪出破坏。
4 结 论
(1)推导了点云数据单个扫描点空间位置精度的评价模型和点云密度评价模型,这为基于三维激光扫描技术变形监测的测量成果精度评定和测量方案的优化设计提供了所必需的理论基础:测站内精度最弱点位于激光扫描仪器的视窗边缘;扫描距离5 m以内,水平扫描角度[−30°,30°]内保持较高的点云密度;扫描时应控制垂直扫描角度β的取值范围,使仪器接收到足够多的回波信息;同时结合实际扫描仪的视场范围和物理模型的尺寸综合确定扫描仪的水平和垂直扫描角度,保证较高的单点位置精度和点云密度。
(2)三维激光扫描技术点云数据位移测量方式有多种,其中点云叠加和点云比较是面测量,可以获得整个模型坡面的变形和位移情况;重心法、拟合法是点测量,可以获得单个监测点准确的位移量。基于三维激光扫描技术坡面变形监测是结合点测量和面测量的优势:通过点云叠加和点云比较获取坡面的变形趋势和变形量级,采用重心法和拟合法获取监测点准确的位移量。既能获得坡面的整体变形,又能获得单个监测点的准确位移量,避免传统特征点监测以点带面的局限性。
(3)基于三维激光扫描点云数据分析了滑坡物理模型的空间演化规律:初始蠕变阶段,点云数据呈现出随机分布,滑坡模型表面变形主要为后缘土体的局部前移与隆起,整体变形小,变形速率较小,位移矢量角呈现出波动,无稳定趋势;试验中期挤压变形阶段,坡面点云数据产生了分离,滑坡模型产生了明显的位移,滑体变形不断向前和两侧发展,前缘、中部均发生隆起现象,变形速率增大,位移矢量角维持在一稳定值;试验后期塑性变形阶段,点云数据产生了更大范围和更大距离的分离,滑坡模型临空面前部出现隆起带及横向、纵向的鼓胀裂缝,变形速率出现趋势性增大,剪出口位移矢量角趋势性减小;滑坡模型整体滑移阶段,变形速率出现明显趋势性增大,剪出口位移矢量角明显趋势性减小;滑坡模型产生持续、快速的整体变形特征,沿滑带发生剪出破坏。
[1]FAYOU A,KONG J M,NI Z Q.Model test on deformation and failure of excavated anti-dip slope under seismic loading[J].Disaster Advances,2012,5(2): 41-47.
[2]SCHNELLMANN R,BUSSLINGER M,SCHNEIDER H R,et al.Effect of rising water table in an unsaturated slope[J].Engineering Geology,2010,114(1): 71-83.
[3]MONTRASIO L,VALENTINO R.Experimental analysis and modelling of shallow landslides[J].Landslides,2007,4(3): 291-296.
[4]冯振,殷跃平,李滨,等.斜倾厚层岩质滑坡视向滑动的土工离心模型试验[J].岩石力学与工程学报,2012,31(5): 890-897.FENG Zhen,YIN Yue-ping,LI Bin,et al.Centrifuge modeling of apparent dip slide from oblique thick bedding rock landslide[J].Chinese Journal of Rock Mechanics and Engineering,2012,31(5): 890-897.
[5]杨国香,伍法权,董金玉,等.地震作用下岩质边坡动力响应特性及变形破坏机制研究[J].岩石力学与工程学报,2012,31(4): 696-702.YANG Guo-xiang,WU Fa-quan,DONG Jin-yu,et al.Study of dynamic response characters and failure mechanism of rock slope under earthquake[J].Chinese Journal of Rock Mechanics and Engineering,2012,31(4): 696-702.
[6]罗先启,葛修润.滑坡模型试验理论及其应用[M].北京: 中国水利水电出版社,2008.
[7]李利平,李术才,赵勇,等.超大断面隧道软弱破碎围岩渐进破坏过程三维地质力学模型试验研究[J].岩石力学与工程学报,2012,31(3): 550-560.LI Li-ping,LI Shu-cai,ZHAO Yong,et al.3D geomechanical model for progressive failure progress of weak broken surrounding rock in super large section tunnel[J].Chinese Journal of Rock Mechanics and Engineering,2012,31(3): 550-560.
[8]陈旭光,张强勇,段抗,等.基于光栅传感的模型测量系统应用研究[J].岩土力学,2012,33(5): 1409-1415.CHEN Xu-guang,ZHANG Qiang-yong,DUAN Kang,et al.Research on application of optical sensor-based measuring method to model test[J].Rock and Soil Mechanics,2012,33(5): 1409-1415.
[9]朱鸿鹄,殷建华,张林,等.大坝模型试验的光纤传感变形监测[J].岩石力学与工程学报,2008,27(6): 1188-1194.ZHU Hong-hu,YIN Jian-hua,ZHANG Lin,et al.Deformation monitoring of dam model test by optical fiber sensors[J].Chinese Journal of Rock Mechanics and Engineering,2008,27(6): 1188-1194.
[10]罗先启,陈海玉,沈辉,等.自动网格法在大型滑坡模型试验位移测试中的应用[J].岩土力学,2005,26(2):231-234.LUO Xian-qi,CHEN Hai-yu,SHEN Hui,et al.Application of automatic mesh methods to landslide model test[J].Rock and Soil Mechanics,2005,26(2):231-234.
[11]白义如,白世伟,冯传玉.改进自动网格法程序以适应模型位移场的测量[J].岩石力学与工程学报,2003,22(4): 543-546.BAI Yi-ru,BAI Shi-wei,FENG Chuan-yu.Improved program of automated grid for the need of model test measurement[J].Chinese Journal of Rock Mechanics and Engineering,2003,22(4): 543-546.
[12]任伟中,寇新建,凌浩美.数字化近景摄影测量在模型试验变形测量中的应用[J].岩石力学与工程学报,2004,23(3): 436-440.REN Wei-zhong,KOU Xin-jian,LING Hao-mei.Application of digital close-range photogrammetry in deformation measurement of model test[J].Chinese Journal of Rock Mechanics and Engineering,2004,23(3): 436-440.
[13]INFANTE M,MARSICO A,PENNETTA L.Some results of coastal defences monitoring by ground laser scanning technology[J].Environmental Earth Sciences,2012: 1-10.
[14]徐进军,王海城,罗喻真,等.基于三维激光扫描的滑坡变形监测与数据处理[J].岩土力学,2010,31(7):2188-2196.XU Jin-jun,WANG Hai-cheng,LUO Yu-zhen,et al.Deformation monitoring and data processing of landslide based on 3D laser scanning[J].Rock and Soil Mechanics,2010,31(7): 2188-2196.
[15]YUE De-peng,WNAG Ji-ping,ZHOU Jin-xing,et al.Monitoring slope deformation using a 3-D laser image scanning system: A case study[J].Mining Science and Technology(China),2010,20(6): 898-903.
[16]ZOGG H M,INGENSAND H.Terrestrial laser scanning for deformation monitoring-load tests on the felsenau viaduct(CH)[C]//XXIst ISPRS Congress.Beijing: [s.n.],2008: 555-562.
[17]TRAVELLETTI J,OPPIKOFER T,DELACOURT C,et al.Monitoring landslide displacements during a controlled rain experiment using a long-range terrestrial laser scanning(TLS)[C]//XXIst ISPRS Congress.Beijing:[s.n.],2008: 485-490.
[18]MARCO INFANTE,ANTONELLA MARSICO,LUIGI PENNETTA.Some results of coastal defences monitoring by ground laser scanning technology [J].Environmental Earth Sciences,2012,67(8): 2449-2458.
[19]BITELLI G,DUBBINI M,ZANUTTA A.Terrestrial laser scanning and digital photogrammetry techniques to monitor landslide bodies[C]//XXth ISPRS Congress.Istanbul: [s.n.],2004: 246-251.
[20]成思源,杨学荣.Geomagic qualify三维检测技术及应用[M].北京: 清华大学出版社,2012.
[21]郑德华,沈云中,刘春.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005,14(2): 32-34.ZHENG De-hua,SHEN Yun-zhong,LIU Chun.3D laser scanner and its effect factor analysis of surveying error[J].Engineering of Surveying and Mapping,2005,14(2):32-34.
[22]陶本藻.误差理论与测量平差基础[M].武汉: 武汉大学出版社,2003.
[23]罗德安,朱光,陆立,等.基于三维激光影像扫描技术的整体变形监测[J].测绘通报,2005,(7): 40-42.LUO De-an,ZHU Guang,LU Li,et al.Whole object deformation monitoring based on 3D laser scanning technology[J].Bulletin of Surveying and Mapping,2005,(7): 40-42.
[24]张启福,孙现申,王力.基于简易六段法的 RIEGL VZ-400激光扫描仪精度测试方法研究[J].工程勘察,2011,39(3): 63-66.ZHANG Qi-fu,SUN Xian-shen,WANG Li.Research of methods to test accuracy of RIEGL VZ-400 laser scanner based on simple six-range analytical method[J].Geotechnical Investigation and Surveying,2011,39(3):63-66.
[25]郑小宁,刘军平.三维激光扫描的应用与精度分析[J].地理空间信息,2008,6(1): 132-134.ZHENG Xiao-ning,LIU Jun-ping.Application and accuracy analysis of 3D laser scanner[J].Geospatial Information,2008,6(1): 132-134.
[26]朱凌,石若明.地面三维激光扫描点云分辨率研究[J].遥感学报,2008,12(3): 405-410.ZHU Lin,SHI Ruo-ming.Research on the point cloud resolutions of TLS[J].Journal of Remote Sensing,2008,12(3): 405-410.
[27]周大伟,吴侃,唐瑞林,等.点云密度对地面三维激光扫描精度及沉陷参数的影响[J].金属矿山,2011,(9):127-130.ZHOU Da-wei,WU Kan,TANG Rui-lin,et al.The influence of point cloud density to accuracy of terrestrial 3D laser scanning and mining subsidence parameters[J].Metal Mine,2011,(9): 127-130.
[28]MALUSHITSKY Y N.The centrifugal model testing of waste-heap embankments[M].London: University Press,1979.
[29]贺可强,阳吉宝,王思敬.堆积层边坡位移矢量角的形成作用机制及其与稳定性演化关系的研究[J].岩石力学与工程学报,2002,21(2): 185-192.HE Ke-qiang,YANG Ji-bao,WANG Si-jing.Study on the forming mechanism of displacement vector angle and stability evolution relation of accumulative-formation slopes[J].Chinese Journal of Rock Mechanics and Engineering,2002,21(2): 185-192.