伺服电机转速测量显示与调控系统设计
2014-05-16祝敬德
张 松, 李 杰,b, 祝敬德, 刘 俊,b, 刘 喆
(1.中北大学a.电子测试技术国防科技重点实验室;b.仪器科学与动态测试教育部重点实验室,山西太原 030051;2.上海航天控制技术研究所,上海 200233)
伺服电机转速测量显示与调控系统设计
张 松1a, 李 杰1a,b, 祝敬德1a, 刘 俊1a,b, 刘 喆2
(1.中北大学a.电子测试技术国防科技重点实验室;b.仪器科学与动态测试教育部重点实验室,山西太原 030051;2.上海航天控制技术研究所,上海 200233)
提出了一种集精确测量电机转速、上位机实时显示转速及数据存储的综合设计方案。该方案采用角速率传感器测量转速,将FPGA作为微控制器控制模数转换并将传感器的输出值存储并处理,提高了整个系统的处理速度。经试验验证,该系统能实时地显示电机的转速,有很好的稳定性和可操作性。
无刷直流电机;角速率传感器;精确测量;实时显示
0 引言
随着电机在各行业的广泛应用,转速的精确测量已成为电机开发研究、测试分析、质量检验、优化控制等环节中必不可少的内容,转速测量系统的研制具有重要的现实意义。
电机伺服驱动系统在出厂时已经配置好缺省参数,缺省参数能保证在无惯性或小惯性负载下系统运行在最佳状态。随着负载的不同,伺服运行性能也会有所变化,如单步响应出现过冲等,如果负载过重,甚至会出现伺服运行不稳定[1]。因此,需要针对不同负载情况对参数进行调整。
传统电机转速检测方法安装麻烦、检测效率低,因此找到一种准确、快速而且方便的测速方法,具有非常重要的现实意义[2-3]。本文所设计的系统可实现电机实时测速及驱动参数在线调整的功能。通过电机转速实时测量及显示系统,可以观测到电机在当前伺服驱动参数下转速的实时测量值,并可在线调整电机的驱动参数。
1 系统工作原理
该系统主要由电机转速测量模块、电机转速控制模块、上位机组成,其组成原理框图如图1所示。其中测量电机转速的传感器采用大小量程陀螺,由FPGA控制数据采集并将其以串口的形式上传到上位机。上位机通过串口接收数据并将其解算为转速,并实时显示。通过将所测的电机转速与电机转速预设值进行比较,进一步在线调整电机驱动参数。
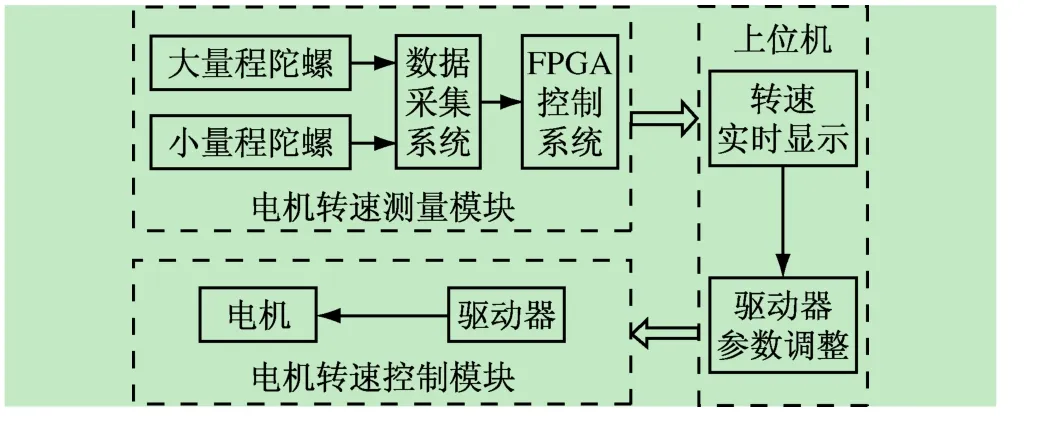
图1 系统总体组成原理框图
2 系统硬件设计
2.1 电机转速实时测量
电机转速实时测量模块由大、小量程陀螺,数据实时采集系统,通讯接口组成。
2.1.1 角速率传感器
本设计对电机转速的实时测量采用MEMS陀螺仪。MEMS陀螺仪具有体积小、重量轻、抗冲击、不受周围环境电磁干扰影响等特性,在该测量系统中易于安装且转速测量过程中对电机负载影响小,可忽略不计,故而本系统采用MEMS陀螺实时测量电机的转速[4-5]。该系统在实际应用过程中,需要电机的转速在30 r/s范围内,为精确得到电机的转速,采用大、小两陀螺分转速测量的方案,其中大量程陀螺仪的量程为10 800°/s,小量程陀螺仪的量程为300°/s。当电机转速较小时,采用小量程陀螺,由于小陀螺的高分辨率能够精确测量电机的转速;当电机的转速大于300°/s,即超出小陀螺的量程时,采用大量程陀螺[6]。该方案在满足电机转速实时测量的同时还可以提高低转速时电机测量的精确度。
2.1.2 数据采集
数据的采集采用TI公司的16位6通道高速同步模数转换芯片ADS8365[6]。MEMS陀螺仪测量得到的模拟信号,需经过AD转换器转换为数字信号,为其上传至上位机实时显示做准备。ADS8365芯片在5 MHz时钟频率下工作时,能够达到的最高采样率为250 kHz,可以满足系统对实时性的要求[7]。转化后的每一位二进制数代表的电压值为0.076 mV,可以满足系统对测量精度的要求。该芯片在FPGA的控制下工作,并将转换得到的数字信号传输到 FPGA中。ADS8365外围电路如图2所示。
系统控制采用Xilinx生产的Spartan-II系列的XC2S30。该FPGA内核采用2.5 V低电压供电,工作频率高达200 MHz,从根本上减小了芯片功耗,同时也解决高速工作状态下发热量大的问题,其次XC2S30共有100个引脚,4个时钟输入端,92个I/O口,3万个门电路,216个可编程逻辑模块。其内部集成了6个双口RAM,共24 kb,具有灵活的可配置性和良好的抗干扰性能,如此丰富的门阵列资源也为实现复杂的控制逻辑提供了可能[8]。FPGA外围电路如图3所示。
FPGA为ADS8365提供时钟信号,通过HOLDA、HOLDB、HOLDC启动AD转换过程。
XC2S30的D0~D15位与ADS8365的并行输出口连接,将 AD转换完的数据读入 FPGA中,并在FPGA内模拟串口,最终将数据以串行通信方式传输到上位机[9-10]。
本设计中只需要两路A/D通道即可,但为了后续系统功能的改进,一共设置了三路A/D转换通道,从硬件上方便系统的优化与进一步升级。
2.2 驱动参数调整模块
伺服驱动器上电以后自动处于激活状态,可以采用RS232口进行伺服系统配置及参数调整。该伺服系统的通讯数据帧格式为:数据包:P=ID+帧长度+功能码+数据+校验和。
其中,每帧数据的第一个字节的格式为:0XXXXXXX,最高位总是零;其他字节的格式为:1XXXXXXX,最高位总为1。因此通过判断数据字节的最高位是否为零即可确认一帧数据的开始。
每台伺服驱动器都有自己唯一的ID号,出厂默认值为0,占用1 Byte。
数据帧长度与功能码供占用1 Byte,该字节中最高位为1,第6位和第5位表示数据帧长度,其中,二进制00代表数据帧长度为4 Byte,01代表数据帧长度为5 Byte,10代表数据帧长度为6 Byte,11代表数据帧长度为7 Byte;该字节中第3位到第0位代表功能码。
电机在不同负载情况下,主增益和速度增益对电机的转速影响较大,故而需主要调整驱动参数中的主增益和速度增益[11-12]。
主增益参数的设定范围为1~127,其对应的功能码为0X10,此参数为伺服环主增益,通常随着负载加重需相应增加,值越大意味着伺服环的响应频带越宽。
速度增益参数的设定范围为1~127,其对应功能码为0X11,此参数为伺服环速度增益,通常随着负载加重需相应增加。值越大意味着伺服环响应频带越窄。实际应用中,较重的负载通常对动态特性要求不很苛刻,因此应该增加速度增益值,减小伺服环频宽[13-14]。

图2 ADS8365外围电路
本设计中采用的电机驱动器支持RS232通讯模式,可以实现上位机控制系统对伺服驱动器的参数设置和运行控制[15]。驱动的RS232通讯接口采用5 V逻辑电平,数据传输波特率为38.4 kb/s。
采用上位机在线调节电机驱动器的参数,需要进行电平转换,将上位机12 V的CMOS电平转换为5 V的TTL电平[16],该转换电路如图4所示。
3 软件设计
3.1 实时显示及参数调整流程
上位机软件采用基于MATLAB的GUI,能够实现电机实时转速的可视化并在线调整电机驱动参数,上位机软件流程如图5所示。
首先通过串口接收大小陀螺测量的实时数,并根据数据格式将数据分离,判断小陀螺的数据是否饱和,若饱和,则说明当前电机的转速超出小量程陀螺的测量范围,此时采用大陀螺的数据作为当前电机的转速;否则,则说明当前电机的转速较小,小量程陀螺的数据可以实时反映当前电机的转速,采用小陀螺的数据作为当前电机的转速,这样就可以精确得到电机的实时转速,并画图显示电机的当前转速。然后比较电机转速测量值与转速的预设值,若两者相等,则选用当前电机驱动器中的参数设定值,否则,通过串口在线调节电机驱动器参数,直至电机转速与设定值相等。
3.2 转速显示界面
将通过串口上传到上位机的数据分离整理,提取出有效数据。此时得到的数据为二进制数,为便于程序后续的转化与计算,将此二进制数转化为十进制数,设为data。为了得到转速信息,需要将此十进制数转换为模拟的电压值,参与后续转速信息的计算。根据ADS8365的芯片资料可知:
当data<32 767时,对应的电压值:

得到电压值后,用电压值除以对应陀螺仪的标度因数就可得到相应角速度信息。此时需要调用相应软件模块将转速信息实时显示出来。由于串口上传的数据实时更新,在可视化的窗口上就可以看到相应的曲线变化。如果此时更改电机驱动相应的参数或是增加/减少电机所带的负载,就可实时地观察电机旋转速度的变化,使操作人员直观地发现相应情况的改变。

图3 FPGA外围电路

图4 串口发送模块

图5 数据处理流程图
4 实验验证
采用信号发生器提供PWM脉冲控制电机旋转,电机转速与PWM波之间的关系如下所示:PWM波频率16 384 Hz所对应的电机转速为360°/s。其实时显示结果如图6所示。

图6 上位机界面
由于电机的负载发生变化,电机实际输出的转速与设定值之间有一定的偏差,且转速不稳定,可以通过上位机实时调整电机的驱动器参数,使得电机转速与设定转速相等。
经过实验验证,所设计的显示系统能够实时地将电机的转速用图形绘制出来,当电机的转速发生变化时,显示系统也能及时地跟随转速的变化,达到了实时显示的目的。同时还可以根据在不同负载的情况下,在线调整驱动器的主增益和速度增益两参数,通过实时显示的电机转速能快速确定不同负载情况下驱动参数的最优值。
5 结语
本文设计的伺服电机转速测量显示与调控系统,能实时显示电机的转速,并通过在线调试伺服驱动器的参数,实现电机在不同的负载情况下参数的最优化。该系统对负载变化响应快,保证电机在负载增加或减少时,都可以稳定运行并可视化显示。该系统采用硅微惯性器件作为测试单元,具有体积小、重量轻、反应灵敏的特点,尤其对于功率很小的微电机,测速系统消耗功率小,能很好反映电机的实际转速,解决了光电码盘测速法、闪光测速法和测速电机测速法等传统测试方法安装麻烦、检测效率低等问题。该系统可广泛应用于电机生产厂家电机性能检测,满足大批量生产的要求,具有一定的工程使用价值。
[1] 聂 挺,王文格,戴俊良.负载动态特性对伺服电机跟随性能影响研究[J].工程设计学报,2013,20(4):309-314.
NIE Ting,WANG Wen-ge,DAI Junliang.Research on influence of the characteristics of dynamic load on servo motor’s following performance[J].Chinese Journal of Engineering Design,2013,20(4):309-314.
[2] 李大英.基于FPGA的电机测速电路设计与实现[J].机械设计与制造,2012(12):78-80.
LI Daying.Design and implementation for tachometer circuit of motor based on FPGA[J].Machinery Design& Manufacture,2012(12):78-80.
[3] 王京锋,孙纯祥,林洪怡,等.高速无刷直流电机控制与无传感器测速研究[J].电力电子技术,2006,40(5):65-67.
WANG Jingfeng,SUN Chunxiang,LIN Hongyi,et al.Study of the Sensor less Speed Detection and Steady Speed Control of BLDCM in Highspeed Running[J].Power Electronics,2006,40(5):65-67.
[4] 温佰仟,刘建业,李荣冰.MEMS硅微陀螺仪系统级建模与仿真研究[J].中国惯性技术学报,2007,15(4):485-487.
WEN Baiqian,LIU Jianye,LI Rongbing.System-level modeling and simulation on silicon MEMS gyroscope[J].Journal of Chinese Inertial Technology,2007,15(4):485-487.
[5] 王 犇,袁 涛,谭 涛.基于MEMS陀螺仪的微惯性测量系统的实现[J].微计算机信息,2008,24(26):152-153.
WANG Ben,YUAN Tao,TAN Tao.Inertia measure us ing MEMS gyroscope[J].Microcomputer Information,2008,24(26):152-153.
[6] 成宇翔,张卫平,陈文元,等.MEMS微陀螺仪研究进展[J].微纳电子技术,2011,48(5):277-285.
Cheng Yuxiang,Zhang Weiping,Chen Wenyuan,et al.Research Development of MEMS Micro Gyroscopes[J].Micronanoelectronic Technology,2011,48(5):277-285.
[7] 丁海飞,王红亮,张会新,等.基于ADS8365的多路数据采集存储系统设计[J].化工自动化及仪表,2012(1):25.
DING Haifei,WANG Hongliang,ZHANG Huixin,et al.Design of Multiplex Data Acquisition and Storage System Based on ADS8365[J].Control and Instruments in Chemical Industry,2012(1):25.
[8] 朴现磊,熊继军,沈三民.基于FPGA的高速数据采集系统的设计[J].微计算机信息,2008,24(1):209-211.
PIAO Xianlei,XIONG Jijun,SHEN Sanmin.Design of a Highspeed Data Acquisition System Based on FPGA[J].Microcomputer Information,2008,24(1):209-211.
[9] 叶卫东,曹照连.基于 FPGA的数据采集系统设计[J].现代电子技术,2005,28(24):112-114.
YE Weidong,CAO Zhaolian.Design of Data Acquisit ion System Based on FPGA[J].Modern Electronics technique,2005,28(24):112-114.
[10] 安 荣,任勇峰,李圣昆.基于FPGA和USB2.0的数据采集系统[J].仪表技术与传感器,2009(3):49-51.
AN Rong,REN Yongfeng,LI Shengkun.Data Sampling System Based on FPGA and USB2.0[J].Instrum ent Technique and Sensor,2009(3):49-51.
[11] 王军锋,唐 宏.伺服电机选型的原则和注意事项[J].装备制造技术,2009(11):129-131,133.
WANG Junfeng,TANG Hong.Servo Motor Selection Principles and Precautions[J].Equipment Manufacturing Technology,2009(11):129-131,133.
[12] 夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):25-34.
Xia Changliang,Fang Hongwei.Permanent-Magnet Brushless DC Motor and Its Control[J].Transactions of China Electrotechnical Society,2012,27(3):25-34.
[13] 夏长亮,李正军,杨 荣,等.基于自抗扰控制器的无刷直流电机控制系统[J].中国电机工程学报,2005,25(2):82-86.
XIA Changliang,LI Zhengjun,YANG Rong,et al.Control System of Brushless DC MotorBased On Active-DistubranceRejection Controller[J].Proceeding of the CSEE,2005,25(2):82-86.
[14] 康 健,孙鹏远,解小华,等.基于观测器的直流伺服电机速度控制[J].控制工程,2004,11(4):381-384.
KANG Jian,SUN Pengfei,XIE Xiaohua,et al.DC Servomotor Speed Control Based on Equivalent Disturbance Torque Estimation[J].Control Engineering of China,2004,11(4):381-384.
[15] 潘 方.RS232串口通信在PC机与单片机通信中的应用[J].现代电子技术,2012,35(13):69-71.
PAN Fang.Application of RS232 Serial Port in Communication between PC and MCU[J].Modern Electronics Technique ,2012,35(13):69-71.
[16] 陈利锋,吴 刚,涂时亮.用 RS232实现即插即拔一对多通信的策略[J].计算机工程,2001,27(10):180-182.
CHEN Lifeng,WU Gang,TU Shiliang.The Strategy to Realize Plug&Play,1 to More Communication with RS232[J].Computer Engineering,2001,27(10):180-182.
Design of Portable and Adjustable High-power DC-DC Source
ZHANG Song1a,LI Jie1a,b,ZHU Jing-de1a,LIU Jun1a,b,LIU Zhe2
(1a.Science and Technology on Electronic Test& Measurement Laboratory;1b.Key Laboratory of Instrumentation Science& Dynamic Measurement,North University of China,Taiyuan 030051,China;
2.Shanghai Institute of Spaceflight Control Technology,Shanghai 200233,China)
In measuring the speed of brushless motor,magnetic encoder is susceptible to be interfered by magnetic field from the motor,and optical-electricity encoder may not match the motor in size.This paper presents a system involving speed measurement,real-time display and data storage.In this system,the gyroscope meters the angular velocity,and DSP is the controller,regulating the A/D conversion and disposing the digital data with high rate.Experiments prove that this system can display motor speed in real time,with the advantages of stability and operability.It has practical significance to motor speed control and debugging.
brushless DC motor;angular rate sensor;accurate measurement;real-time display
TN 86;TN 710.2
A
1006-7167(2014)05-0053-05

2013-08-19
国家自然科学基金项目(50905169)
张 松(1987-),男,辽宁丹东人,硕士生,主要研究方向为微系统集成及自动控制。
Tel.:18234138772;E-mail:18234138772@126.com
李 杰(1976-),男,山西岚县人,博士,硕士生导师。
Tel.:0351-3558098;E-mail:lijie@nuc.edu.cn