深水半潜平台锚泊辅助动力定位系统锚链布置方式影响分析
2014-05-16王溢俊蒋圳佯陈诗洋
王溢俊, 王 磊, 蒋圳佯, 陈诗洋
(上海交通大学海洋工程国家重点实验室,上海 200230)
深水半潜平台锚泊辅助动力定位系统锚链布置方式影响分析
王溢俊, 王 磊, 蒋圳佯, 陈诗洋
(上海交通大学海洋工程国家重点实验室,上海 200230)
随着海洋资源开发的深入,作为海洋资源开发的主要工具,深水半潜式平台及其相关研究越来越受到重视。为了给实际工程中深水平台的定位系统布置提供参考,着手研究不同锚链布置方式对深水半潜式平台的定位能力的影响,针对较为新颖的锚泊辅助动力定位系统,研究了锚泊系统布置方式的变化对整个系统的定位能力,功率消耗等的影响程度。从一艘半潜式平台入手,分别对两种不同锚链布置方式下的锚泊辅助动力定位系统进行全动态时域模拟,从而得到在不同的迎浪角度下平台的水平偏移以及总功率消耗的时历曲线,并归纳其统计值进行比较。分析结果得知,增加锚链数量能够增强系统的定位能力。平台越趋于横浪时,增加锚链数量的辅助定位效果越明显,能耗越小,经济性越好。所作研究为实际工程中锚泊辅助动力定位系统的设计,提供了一定的借鉴和参考。
锚泊辅助动力定位;时域模拟;半潜式平台;锚链布置方式
0 引言
当今世界,能源问题在国际舞台上越来越多地被提及。21世纪人类正迈入海洋经济时代,人们对海洋开发和探索范围越来越大,从而对浮式生产系统(包括半潜平台,生产油轮)的系泊方式研究日益重视[1]。
最初,在近海的石油勘探和浮式生产中,广泛使用锚泊系统进行平台定位[2],但是,由于探索范围的扩大以及海洋深度的增加,普通锚泊系统的效果受到了很大影响[3]。而动力定位技术[4]随后迈入了海洋工程领域的历史舞台。动力定位系统是一种闭环控制系统[5],通过合理的控制策略使平台保持动态平衡。考虑进功率消耗等问题后[6],一种新的尝试希望把动力定位系统和锚泊定位系统的优点相结合,这就是锚泊辅助动力定位系统。
锚泊辅助动力定位系统在国内仍属于未充分开发的领域,怎样能使得锚泊系统和动力定位系统很好地结合一直是个较前沿的问题。锚泊系统包括了锚、锚链、锚机以及其他设备[7]。其中,锚链的相关参数包括粗细、数量以及布置方式对整个系统的定位能力尤为重要。本文将侧重于分析锚链的数量以及布置方式对锚泊辅助动力定位系统的影响。Smith等[8]比较了4种不同的锚泊系统布置方式的定位能力。陈徐均等[9]推导不同的布链方式下锚泊系统所提供的首摇以及横摇回复力矩的大小,当锚链数量以及布置方式改变时,对锚泊定位系统的影响是不能忽略的。这也使得研究锚链布置方式对锚泊辅助动力定位系统的影响有了非常重要的意义。
本文针对一艘半潜式平台,设置了两种锚链数量不同的锚泊辅助动力定位系统,从定位精度和功率消耗比较两种不同锚链布置方式下的锚泊辅助动力定位系统差异,研究锚链布置方式对定位系统的影响。
1 理论基础
1.1 平台时域运动方程
半潜式平台在外力作用下的低频运动方程为[10]:

式中:u,v,w为线位移速度,即x·,y·,z·(上点表示对时间的导数);p,q,r为角位移速度,即·,θ·,Ψ·;m为平台质量,包含流体附加质量;Ixx,Iyy,Izz,Izx为质量惯性矩,也包括附加质量部分;X,Y,Z分别为x,y和z方向的外力;K,M,N分别为x,y和z方向的外力矩。
1.2 锚泊辅助动力定位系统
对于锚泊系统,可利用悬链线方程及其推论进行求解。对于动力定位系统[11],推力、转矩及功率的计算公式为[12]:

式中:n为螺旋桨转速;Q为螺旋桨的转矩;D为螺旋桨的直径;KT为推力系数;KQ为转矩系数,KT,KQ可根据轴向进速在螺旋桨敞水性征曲线上查取。
2 算例
2.1 平台模型
研究对象为一半潜式平台,由上下2个浮体、4根立柱、甲板以及上层建筑组成,平台参数详见表1。

表1 半潜式平台主要参数表
2.2 动力定位系统参数
动力定位系统的推进系统采用8个全回转导管推力器器,推力器最大功率4.200 MW,推进器的布置图如图1所示。

图1 动力定位系统推进器布置示意图
2.3 锚泊系统参数
锚泊系统通常包括多根锚泊线,其布置形式一般是对称布置[13],本次的锚泊系统采用的是8点分散式悬链线系统,每点连接1根三段复合式锚链,共8根,对称分布于4支立柱外侧。每根锚缆总长4 300 m,系泊半径3 889 m,锚链各段破断强度及材料特性等参数见表2。
本文讨论两种在实际工程中应用较多的锚泊辅助动力定位系统(8缆锚泊辅助动力定位系统,4缆锚泊辅助动力定位系统)在辅助定位性能上的不同。8缆系统(系统1)及4缆系统(系统2)的布置详见表3,示意图如图2所示。

表2 组合锚链主要物理属性(水深1 500 m)

表3 系统1布置参数
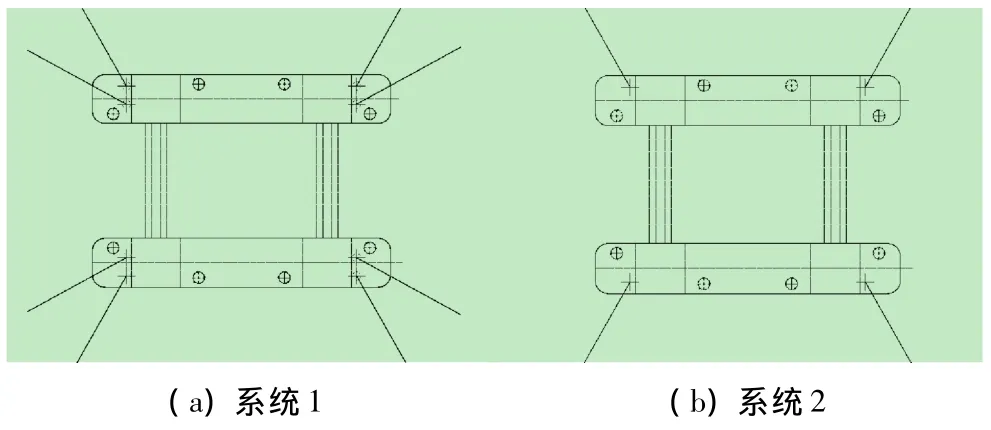
图2 锚泊辅助动力定位系统布置示意图
作为比较,在原8缆系统的基础上去掉4根缆,4个导缆孔的位置仍然对称分布在支柱的外侧,构成4缆锚泊辅助动力定位系统,其参数详见表4。

表4 系统2布置参数
2.4 环境条件
研究选取平台正常工作的海况,取风、浪、流联合作用作为计算的环境条件。平台在海上定位后,由于海洋环境条件的复杂性,各方向都有可能成为迎浪方向,只是作用时间长短不同。本文除了选择船艏迎风浪的180°浪向外,另外选择了具有代表性的225°与270°浪向来综合分析,分别模拟 180°、225°、270°迎浪时锚泊辅助动力系统的表现。计算水深为1 500 m,详细计算环境条件如表5所示。
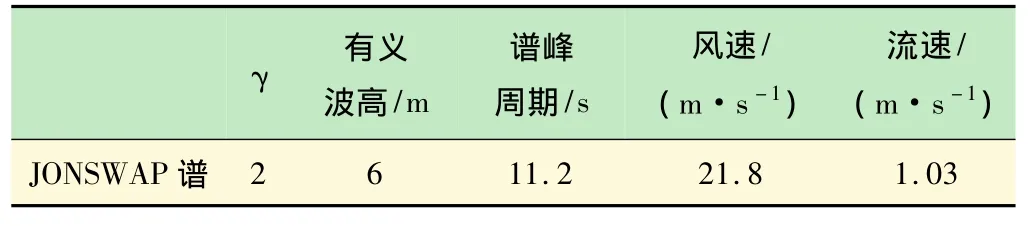
表5 平台作业状态环境条件
3 计算结果
使用DPSEMI软件进行时域模拟[14],分别模拟系统1、2 在180°、225°以及 270°迎浪时的表现,并最终得到水平偏移和总功率消耗的时历曲线[15]及其统计值。平台在不同迎浪角度下的水平偏移时历曲线如图3所示。两种锚泊辅助动力定位系统在不同迎浪角度下的总功率消耗如图4所示。
通过对数据的处理分析,各迎浪角下2种锚泊辅助动力定位系统的水平偏移以及功率消耗的统计值见表6、7。2个锚泊系统下平台的首摇角只有微小的差别,且角度很小,在此不作罗列。
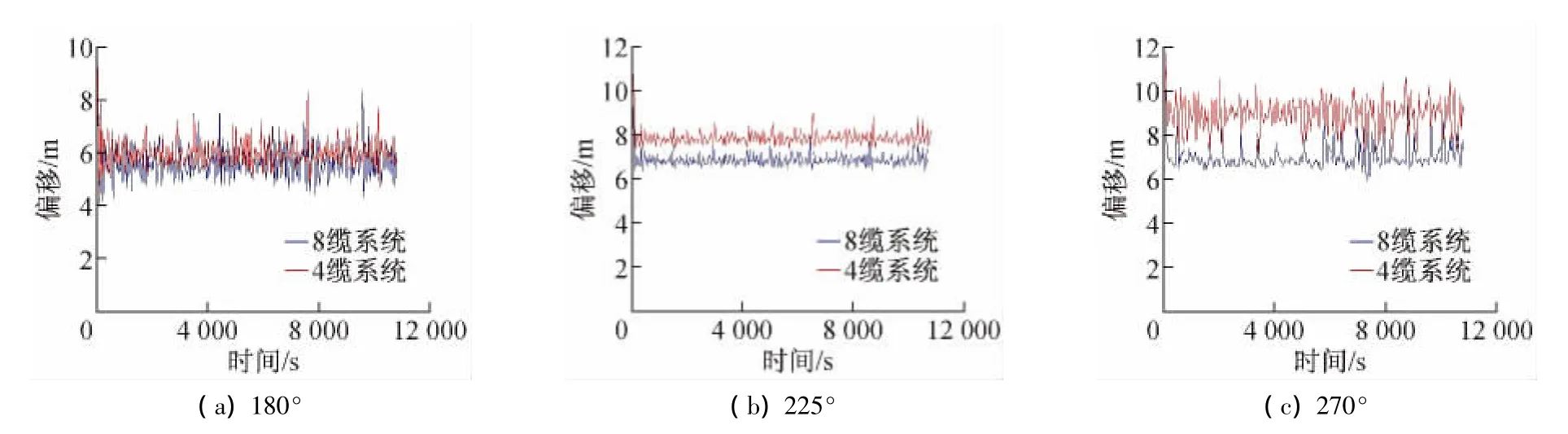
图3 不同迎浪角度下的平台偏移

图4 不同迎浪角下的平台功率消耗

表6 平台水平偏移统计值
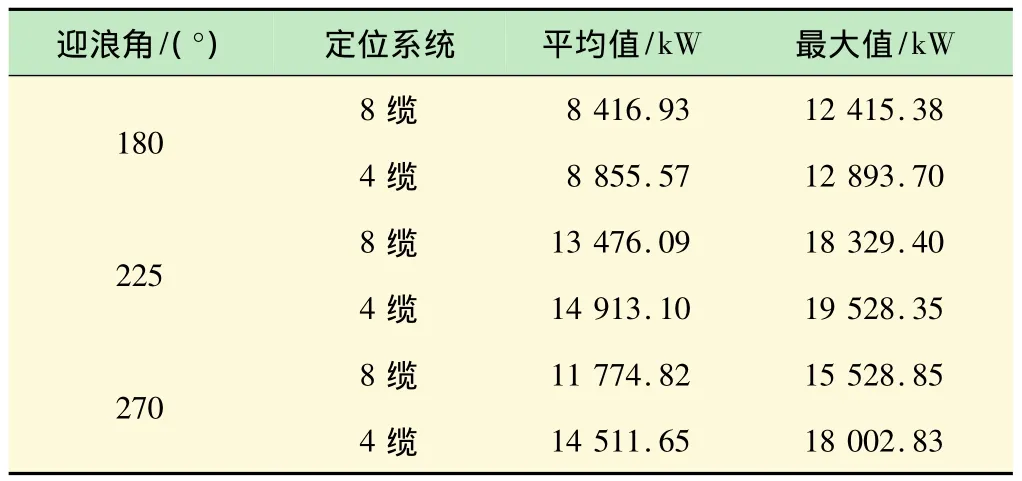
表7 平台总功率消耗统计值
4 结果分析
分析上述时历曲线图以及统计值表,可以得出:
(1)3种迎浪角下,系统1相较系统2的偏移值有不同程度的减小。180°迎浪时,系统1的水平偏移的平均值比系统2减小了6.77%;225°迎浪时,减小了 14.26%;270°迎浪时,减小了 27.45%。
(2)3种迎浪角下,系统1下平台所消耗的总功率的平均值都明显小于系统2。180°迎浪时,系统1相较系统2所耗功率减少了5.21%;225°时,减少了10.66%;270°时,减少了 23.24%。
(3)3种迎浪角度下系统1的定位性能都优于系统2,这与锚泊定位系统的经验规律相一致。
(4)当平台越趋向于顶浪时,锚泊辅助系统对定位能力的提高效果越不明显,这是由于趋近于顶浪时,平台的偏移较小,对动力定位系统的负荷也较轻,动力定位系统的定位效果就越好。这可以从数据中反映出来:270°时的水平偏移平均值与180°时相比增加了14.22%(系统 1)和 49.58%(系统 2);270°时所消耗总功率的平均值与180°时相比增加了39.89%(系统1)和63.87%(系统2)。故而,越趋近于顶浪时,动力定位系统的定位效果越好,锚泊辅助系统的辅助效果也就越不明显。相反,平台越趋近于横浪,其辅助效果越显著。
5 结语
本文通过对锚泊辅助动力定位系统锚链布置方式的影响分析,可以得出如下结论:
(1)总体来说,通过增加锚链的数量可以有效地提高锚泊辅助动力定位系统的定位能力,减少定位系统的功率消耗。且平台越趋向于横浪时,其对定位系统的辅助效果越明显。
(2)当平台顶浪时,锚泊辅助系统对定位能力的提高效果不明显。系统设计过程中,在考虑是否增加锚链时应计及锚链铺设的成本。在设计锚泊辅助动力定位系统时,如果平台需要长时间保持定位或者不得不接近于横浪工作,可以通过增加锚链数量来有效地降低定位系统的能耗,提升经济性同时大幅提高锚泊辅助动力定位系统的定位能力。实际工程中,在满足定位效果的前提下,应将定位精度与经济成本结合起来,根据不同的环境条件,选择合适的系统,使两者达到最优平衡。
[1] 赵志高,杨建民,王 磊,等.动力定位系统的发展状况及研究方法[J].海洋工程,2002,20(1):91-97.
ZHAO Zhi-gao, YANG Jian-ming, WANG Lei,et al.. The development and research method of dynamic positioning system[J].Ocean Engineering,2002,20(1):91-97.
[2] 余 龙,王 娟.半潜式平台深水锚泊系统三维时域动力分析[J].中国海洋平台,2007,22(6):34-37.
YU Long,WANG Juan.Dynamic analysis of the 3D mooring system on semi-submersible platform in deep water[J].China Offshore Platform,2007,22(6):34-37.
[3] Zhang F,Wang L,Li Y Y.Research on the impact of one line failure for a mooring assisted dynamic positioning system[J].Ocean Engineering,2012,30(3):29-34.
[4] Srensen A J.A survey of dynamic positioning control systems[J].Annual Reviews in Control,2011,35(1):123-136.
[5] Lough A.Dynamic positioning[J].Automatic,1993,29(4):865-875.
[6] 孙 攀,王 磊,王 亮,等.深水半潜平台锚泊辅助动力定位系统功率消耗研究[J].海洋工程,2010,28(3):24-30.
SUN Puan,WANG Lei,WANG Liang,et al.Research on power consumption of position mooring system for a deep sea semisubmersible platform[J].Ocean Engineering,2010,28(3):24-30.
[7] 潘 甜.组合锚泊系统的分析与研究[D].武汉:武汉理工大学,2010.
[8] Smith T M,Chen M C,Radwan A M.Systematic data for the preliminary design of mooring systems[C]//Proceedings of the Fourth International Offshore Mechanics and Arctic Engineering Symposium.1985:403-407.
[9] 陈徐均,汤雪峰,沈 庆,等.系泊浮体布链方式优劣的理论分析[J].河海大学学报,2001,29(5):84-87.
CHEN Xu-jun,TANG Xue-feng,SHEN Qing,et al.Theoretical Analysis of Mooring Chain Disposition for a Float-Body[J].Journal of Hohai University,2001,29(5):84-87.
[10] 李勇跃,王 磊,孙 攀.深水半潜式钻井平台动力定位最优作业方向研究[J].海洋工程,2011,29(1):26-31.
LI Yong-yao,WANG Lei,SUN Pan.Research on the optimum operation direction for a deep sea semi-submersible drilling platform based on dynamic positioning[J].Ocean Engineering,2011,29(1):26-31.
[11] Loria A,Fossen T I,Panteley E.A separation principle for dynamic positioning of ships:theoretical and experimental results[J].Control Systems Technology,IEEE Transactions on,2000,8(2):332-343.
[12] 张 峰,王 磊,李勇跃.锚泊辅助动力定位系统单缆失效影响研究[J].海洋工程,2012,30(3):29-34.
ZHANG Feng,WANG Lei,LI Yong-yao.Research on the impact of one line failure for a mooring assisted dynamic positioning system[J].Ocean Engineering,2012,30(3):29-34.
[13] 余 龙,谭家华.深水中悬链线锚泊系统设计研究进展[J].中国海洋平台,2004,19(3):24-29.
YU Long,TAN Jia-hua.Recent Research& Development of the Catenary Mooring System Design in Deep Water[J].China Offshore Platform,2004,19(3):24-29.
[14] 周 利,王 磊,陈 恒,等.半潜平台动力定位系统功率消耗时域模拟[C]//第二十一届全国水动力学研讨会暨第八届全国水动力学术会议暨两岸船舶与海洋工程水动力学研讨会论文集.2008:1024.
ZHOU Li,WANG Lei,CHEN Heng.Time-domain simulation on power consumption of a semi-submersible dynamic positioning system[C]//Articles of 21stChina Hydrodynamics Conference&8thChina Hydrodynamics Academic Conference&China Mainland-Taiwan Naval Architecture and Ocean Engineering Hydrodynamics Conference,2008:1024.
[15] 周 利,王 磊.船舶动力定位系统与锚泊辅助动力定位系统的时域模拟比较[C]//第三届亚太地区潜水与水下技术论坛论文集.2008:288-293.
ZHOU Li,WANG Lei.Time-domain simulation comparison between ship dynamic positioning system and mooring assisted dynamic positioning system[C]//Articles of3rdAPEC Subsea and Underwater Technology Forum.2008:288-293.
Research on the Impact of Mooring Line Arrangement for a Mooringassisted Dynamic Positioning System of a Semi-submersible Platform
WANG Yi-jun,WANG Lei,JIANG Zhen-yang,CHEN Shi-yang
(State Key Laboratory of Ocean Engineering,Shanghai Jiaotong University,Shanghai 200230,China)
The research focuses on the impact of mooring line arrangement for a mooring-assisted dynamic positioning system and analyzes the behaviors of the system in its positioning ability and power consumption under different mooringline arrangements for the first time.The article uses a semi-submersible platform as an example.Time domain simulation is used to analyze the positioning system and to compare its behaviors under two different mooring line arrangements.Then the horizontal offset and power consumed as well as their statistic values are analyzed.From the result we can see that more mooring lines benefits the positioning system in general and the effect is more profound when the heading direction of a semi-submersible platform is more vertical to wave direction,which indicates less energy consumption and more profits.The result can be easily introduced into engineering practice and provide designers with useful information when designing a mooring-assisted dynamic positioning system.
mooring assisted dynamic positioning system;time domain simulation;semi-submersible platform;mooring line arrangement
P 751
A
1006-7167(2014)05-0005-04

2013-07-26
国家自然基金资助项目(51179103);工信部高技术船舶科研项目
王溢俊(1990-),男,上海人,本科生。
E-mail:yijunwangwang@tudelft.nl
王 磊(1971-),男,安徽蚌埠人,副教授,主要从事动力定位系统的研究。Tel.:021-62932025;E-mail:wanglei@sjtu.edu.cn