基于HCA的改进收敛准则优化算法研究
2014-05-15向晓波田启华杜义贤
向晓波 田启华,2 杜义贤,2,3
(1.三峡大学 机械与材料学院,湖北 宜昌 443002;2.三峡大学 水电机械设备设计与维护湖北省重点实验室,湖北 宜昌 443002;3.三峡区域能源装备三峡大学协同创新中心,湖北 宜昌 443002)
随着结构优化技术研究的深入发展,结构拓扑优化已成为结构优化领域的研究热点之一[1].与尺寸优化、形状优化相比,结构拓扑优化具有更大的设计自由度和更广阔的设计空间以满足苛刻的设计要求[2].目前,常用的连续体结构拓扑优化方法大多基于梯度优化算法,在优化模型的求解中需要反复进行敏度分析,不利于求解复杂的结构优化问题.Tovar等[3]将元胞自动机理论引入结构拓扑优化方法中,提出了混合元胞自动机(Hybrid Cellular Automata,HCA)算法.周珍珍等[4]研究混合元胞自动机方法处理结构拓扑优化设计的问题.王安麟[5]提出了基于进化建立元胞自动机局部直接规则的方法,有效解决了局部间接规则存在的局限性问题.
在求解数学中的最优化问题及工程中结构拓扑优化问题中,能够直接解析求解得到结果的非常有限,一般都需要通过迭代法进行求解[6].而在算法的迭代过程中,收敛准则的选用将直接影响优化设计的精度及结果.目前,采用收敛准则求解问题的思想在人工智能和自动化控制等领域都获得较为广泛的应用[7].因此,研究收敛准则具有十分重要的理论意义和应用价值.
本文在总结现有收敛准则算法的基础上,结合范数矩阵的理论,提出了一种基于HCA的改进收敛准则优化算法,来抑制拓扑优化过程中可能出现的灰度单元问题.并通过经典二维拓扑优化数值算例,探讨所提出的收敛准则在解决拓扑优化中灰度单元问题上的可靠性和有效性.
1 连续体结构拓扑优化建模
1.1 密度插值函数模型
变密度法中常用的插值模型是固体各向同性惩罚微结构模型(solid Isotropic microstructure with penalization,SIMP)[8],SIMP材料插值方法主要通过引入惩罚因子对单元的中间密度值进行惩罚,本文基于各向同性材料,建立非线性的幂函数来表示材料的弹性模型与单元相对密度之间的显式对应关系

式中,E0和ρ0分别是实体材料的弹性模量和密度,ρe和Ee是单元材料的密度和相对密度,Ee和Emin是固体和孔洞材料的弹性模量,ΔE0=E0-Emin,Emin=E0/1000,p是惩罚因子.
1.2 基于HCA的拓扑优化数学模型
HCA算法是将CA理论和有限元方法结合起来的一种无梯度优化算法.在CA模型迭代演化时,将单元的平均应变能密度值与目标值之间的差值作为反馈信号,优化的目的是使反馈信号值最小化.本文采用变密度法中SIMP材料插值模型,建立基于HCA的结构拓扑优化模型为

2 改进的算法收敛准则
收敛准则就是判断在一定的精度要求下,数值求解过程中所得到的迭代点是否正是需要的.不合适的收敛准则可能会导致最终的迭代结果无法收敛或者得到不好的优化结果.
理想的迭代收敛准则是将结构的质量变化作为收敛准则,质量的表达式为

式中,ρe(t)和ρ0分别是变质量密度和固体材料密度,M(t)是第t次迭代时结构的质量.
目标函数的收敛准则取决于设计变量更新时所采用局部控制规则的类型,Tovar在文献[3]中将迭代过程中结构的质量变化达到稳定状态作为优化模型的收敛准则,为避免目标函数出现过早收敛,将连续两次迭代时质量绝对变化的平均值小于给定值作为收敛条件,具体的数学表达式为

式中,ΔM(t)=M(t)-M(t-1)是第t次迭代时结构质量的变化量,ε是给定容差.
范数(norm)是数学中的一种基本概念,在泛函分析中,范数是一种定义在赋范线性空间中函数,满足相应条件后的函数都可以被称为范数[9-10].最常用的范数就是P范数.若x=[x1,x2,x3,…,xn]T,那么

本文引入P范数理论的概念,通过判断在这些方向上充分接近t+1迭代点处,达到判别最优点的目的,基于这种思想,提出了一种新的算法收敛准则.当相邻两次设计变量的迭代结果足够小时,收敛准则的数学表达式为

式中,M(t+1)是第t+1次迭代时结构质量.
本文提出的收敛准则引入P范数后,使前后两个迭代点充分绝对接近,具有更多下一时刻t+1迭代点周围的信息,因为在迭代过程中能够搜索到极小值点,使收敛准则有更高的可靠性.
3 基于HCA的结构拓扑优化建模与求解
3.1 HCA拓扑优化方法
HCA算法是一种无梯度的优化方法,将元胞自动机方法与有限元分析结合进行结构优化,最初用于模拟骨重塑过程,根据骨骼功能自适应理论进行骨骼重新塑造,使骨骼具有均匀应变能密度.
HCA模型的基本组成有元胞栅格、每个元胞的状态集合和状态更新规则集合.每个元胞的状态由当前时刻t状态及其邻域元胞的状态决定下一个时刻t+1该元胞的状态.元胞第j种的状态更新规则可以表示为

式中,αe(t),αe+Δ1(t),αe+ΔN(t)表示元胞e的邻居元胞.
CA本质上是时空离散化的数学模型,由有限个元胞单元构成,每个元胞单元具有特定的状态值.在某一时刻(或某次迭代),每个元胞的状态值仅与与其相邻的几个元胞的状态值相关.状态更新规则需要收集每个元胞领域元胞的状态信息.本文采用包含8个邻居元胞的Moore邻居类型,如图1(a)所示.为了定义位于设计域边界上的元胞更新规则,必须先定义不同的边界条件.本文选用固定边界条件,即设计域边界外的状态为零,如图1(b)所示.

图1 元胞自动机的领域和边界条件
拓扑优化迭代过程中,每个元胞的设计变量可定义为单元密度xe,每个元胞的状态场变量可以定义为应力、应变、应变能、互应变能或者它们的函数Se.这时,元胞的状态可以表示为

式中,αe(t)是元胞的状态,xe(t)是元胞的设计变量,Se(t)是元胞的状态场变量.

式中,Ue(t)为元胞应变能密度值;Ui为邻居元胞的应变能密度值;N为元胞邻居数量.
3.2 局部控制规则
设计域中的材料分布由局部控制规则确定,它寻求状态场变量平均值与状态场变量设定值差值减小到最小.局部控制规则有两位置、线性、积分和微分控制.较复杂的控制策略是比例-积分-微分(Proportional-Integral-Derivative,PID)反馈控制,该控制策略已广泛应用于控制应用问题中,数学表达式为

式中,cP,cI,cD分别是比例,积分和微分的权系数.本文采用局部比例控制.
3.3 HCA算法的求解流程
本文采用HCA算法求解优化模型,求解流程如图2所示.在迭代计算时,CA状态的平衡条件-=0与满应力设计准则一致,使非空元胞处于满应力状态.
Step1:定义设计域、材料属性、载荷等参数,初始化元胞值x(0),离散设计域为有限个CA单元;
Step2:采用有限元方法进行结构分析,根据式(11)分别计算元胞单元在第t次迭代时应变能Ue和平均应变能
Step3:采用基于反馈控制的CA局部控制规则更新设计域内材料的分布;
Step4:根据改进的收敛准则和给定容差ε,判断迭代是否收敛.若迭代满足收敛准则,则得到设计域内材料的最优分布,迭代终止;否则,返回到Step2.

图2 混合元胞自动机算法求解流程
4 经典数值算例及结果分析
图3为悬臂梁的设计域,结构初始设计域离散为80×50个单元.材料弹性模量E=210GPa,泊松比μ=0.3;悬臂梁的左端为固支约束,竖直向下的集中载荷F=1kN作用在右边界中心位置.单元相对密度的初始值取为1.0(实体材料);利用有限元法求解初始结构的总应变能U0=19.2Nmm,单元的局部应变能密度目标值=U0/(80×50)=4.8×10-3Nmm/mm3.

图3 悬臂梁的设计域
1)范数值对优化结果的影响
针对悬臂梁结构拓扑优化模型,采用本文提出的改进收敛准则,在相同的初始条件和约束下,分别选用不同的范数值,通过HCA算法对优化模型进行求解,得到图4所示的优化结果.

图4 不同范数下拓扑优化结果
从图4可知,随着范数值的不断增大,本文提出的收敛准则得到的拓扑结构的应变能和灰度单元会逐渐降低.当范数值小于20时,拓扑图形会出现严重的灰度单元现象.当范数值在60和100之间时,应变能和灰度单元数量开始出现略微下降.因此,当采用本文提出的收敛准则时,选用合理的范数值能得到更低的应变能值且能更好地抑制灰度单元的出现.
2)灰度单元问题
针对本文提出的收敛准则,采用3种不同的范数值,分别为20,80,100.对模型进行优化求解,与采用文献[3]中的收敛准则得到的拓扑优化结果进行对比,见表1.
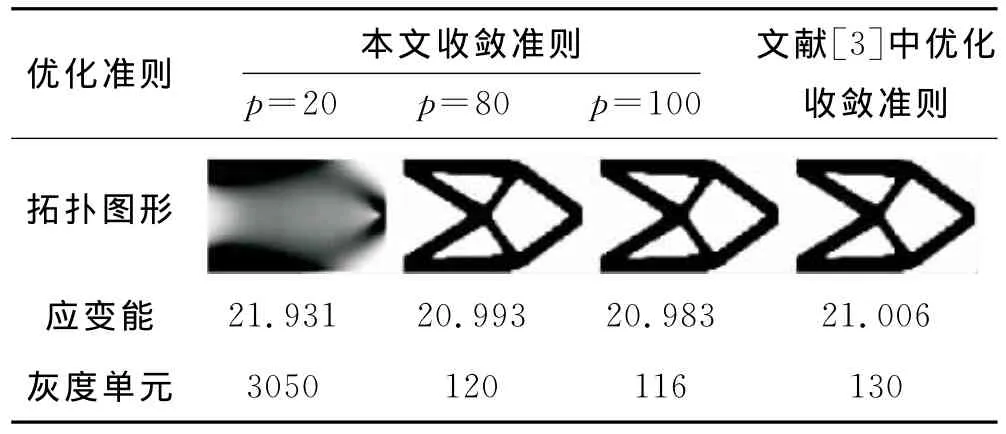
表1 两种收敛准则下拓扑优化结果对比
由表1可知,当范数值为20时,得到的优化结果中出现大量的灰度单元.当范数值为80或100时,得到的拓扑图形跟经典拓扑图形相似.当范数值为100时,得到应变能值20.983和灰度单元数目116,比采用文献[3]中收敛准则得到的应变能值21.006和灰度单元数目130,分别减少了0.11%和10.8%.因此,采用本文提出的收敛准则得到的应变能更小,并能更好地抑制灰度单元的出现.
5 结 论
本文对CA和拓扑优化的结合技术进行了探讨,借助范数矩阵的理论,提出了一种改进的拓扑优化收敛准则优化算法.通过经典二维拓扑优化算例,分析了不同的范数值对拓扑优化结果的影响,并与采用文献[3]中收敛准则得到的拓扑优化结果进行对比,证明了本文提出的收敛准则能够有效地抑制灰度单元的出现,取得更好的应变能目标值,并最终能够得到轮廓较清晰的拓扑优化图形.
[1]左孔天.连续体结构拓扑优化理论与应用研究[D].武汉:华中科技大学,2004.
[2]杜义贤,王 伟,李 然,等.结构拓扑优化中敏度过滤技术研究[J].工程设计学报,2012,19(1):20-24.
[3]Tovar A,Patel N M,Niebur G L,et al.Topology Optimization Using a Hybrid Cellular Automaton Method with Local Control Rules[J].Journal of Mechanical Design,2006,128(6):1205-1216.
[4]周珍珍.基于混合元胞自动机方法的结构拓扑优化研究[D].武汉:华中科技大学,2009.
[5]王安麟,姜 涛.基于进化元胞自动机的结构拓扑优化[J].机械工程学报,2005,41(2):1-5.
[6]孙云龙.关于最优化问题的算法收敛准则[J].四川师范大学学报:自然版,1999,22(3):323-325.
[7]唐焕文,秦学志.实用最优化方法[M].大连:大连理工大学出版社,2000.
[8]Bendse M P,Sigmund O.Topology Optimization:Theory,Methods,and Applications[M].Berlin Heidelberg,New York:Springer,2003.
[9]赵瑞珍,秦 周,胡绍海.一种基于特征值分解的测量矩阵优化方法[J].信号处理,2012,28(5):653-658.
[10]徐 仲,张凯院.矩阵论简明教程[M].北京:科学出版社,2005.
