基于DSP和CPLD的无刷直流电机控制系统设计
2014-05-07魏平芬王元奎
魏平芬,王元奎
(1.海军驻昆明705研究所军代表室,云南 昆明 650118;2.中国船舶重工集团公司第705研究所昆明分部,云南 昆明 650118)
0 引 言
无刷直流电机(BLDCM)以其结构简单、运行可靠、高效率、无励磁损耗以及调速性能好等优点在航空航天、机器人、雷达等领域得到了广泛应用[1~3]。近年来,水下无刷直流电机驱动系统领域的研究成为热点[4~6]。而 BLDCM 具有非线性、多变量、强耦合等特点,很难建立其精确的数学模型,传统控制系统设计软件开发的控制算法有一定的局限性,往往达不到预期控制效果[7]。
无刷直流电机的性能直接影响水下航行器的任务执行能力,根据水下航行器的使用要求,给出了一种控制系统方案。该方案采用提前换向控制算法,使用高性能DSP芯片,同时引入了半定制专用芯片CPLD和高度集成的IPM模块,满足了电机控制系统不断增加计算速度和逻辑处理实时性的要求,简化了逻辑处理的复杂性。经样机验证,整个控制系统控制灵活、实用性强。
1 系统硬件结构
1.1 功率电路
系统功率电路结构见图1。

图1 系统功率电路结构
系统功率电路由滤波电路和逆变电路组成。前者采用高频无感电力电容,吸收母线纹波,提高供给IPM的电压品质;后者采用PM450CLA060,内置6单元高速、低导通压降的IGBT功率管,由它构成向无刷电机供电的三相桥式主电路,而且模块中集成了IGBT驱动电路、保护电路、检测电路等,从而使功率模块具有较高的可靠性,布局更加合理,无外部驱动线,抗干扰能力强。
1.2 全数字控制电路
数字控制模块是整个系统的核心部分见图2。由电机控制专用数字处理器(DSP)TMS320LF2407A和可编程逻辑器件(CPLD)EPM7128AETC100构成。具有丰富外设、超强数据计算能力、高度集成的DSP与编程简单、超强逻辑处理能力以及I/O接口配置灵活的CPLD组合在一起,能有效提高电机控制的实时性、节省电路板空间、简化硬件电路设计、改善控制电路的灵活性、提高电磁兼容性。U、V、W 电流检测用于控制电机输出转矩和限制流过IPM的电流,防止由于过电流损坏功率模块。IPM输出的六路故障信号经CPLD合成为一路故障信号,直接送到DSP的功率驱动保护中断输入引脚,当产生故障时,中断保护直接切断6路PWM输出,有效保护整个控制系统。驱动信号和位置信号经过CPLD后,能有效去除由于干扰而产生的毛刺,有效提高系统的抗干扰能力。通过CAN2.0B总线或I/O方式实现给定电机速度,同时通过CAN2.0B总线实时提供控制系统的运行状态参数。
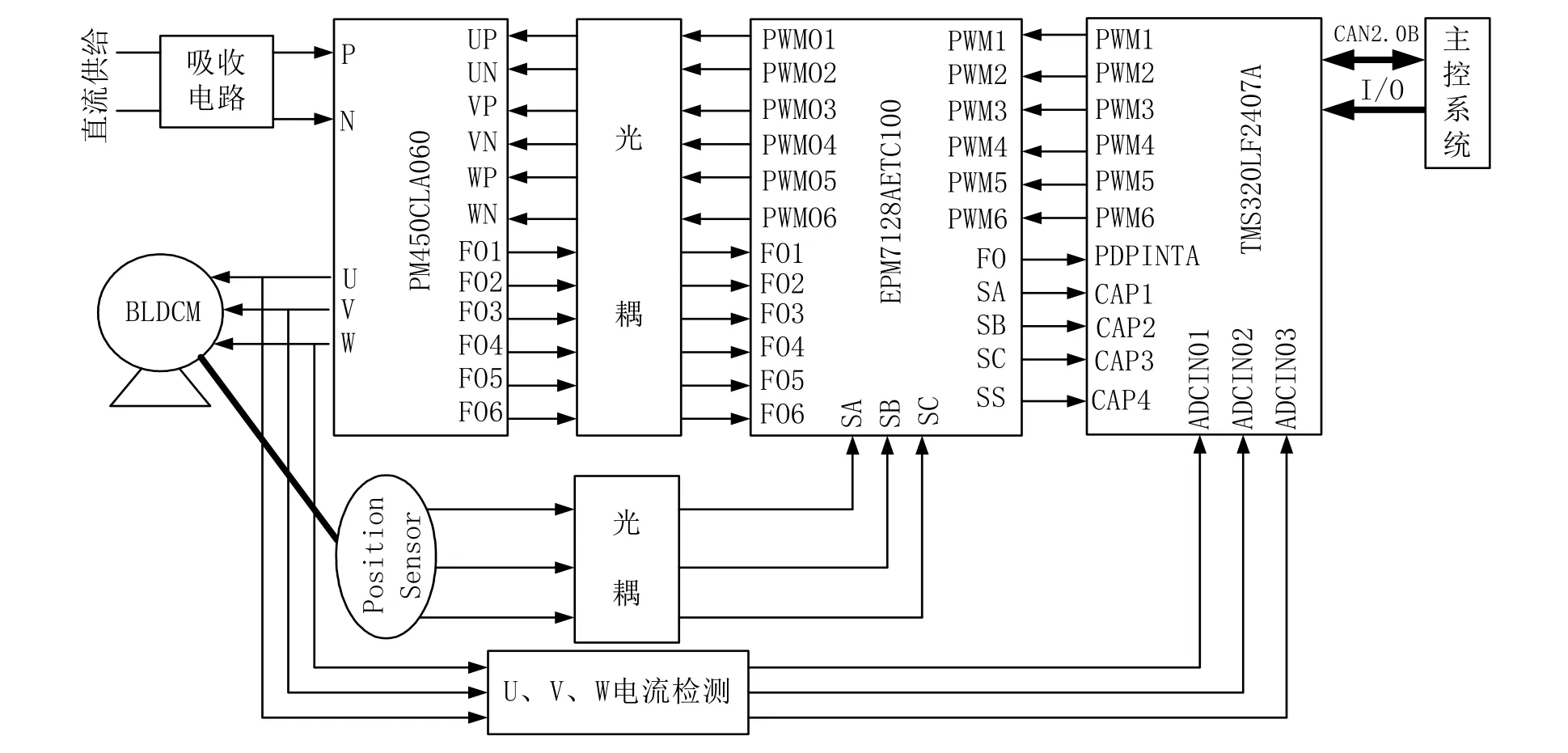
图2 无刷直流电机控制系统
2 系统软件结构
2.1 电机软启动
利用DSP实现电机的软启动,即PWM脉宽的逐渐展开,不但可以降低电机的启动冲击,而且可以控制电机的启动电流,在电机启动时不产生过流。当控制系统接收到启动命令后,DSP首先执行软启动子程序,产生一系列脉宽逐渐增加的PWM波见图3。
2.2 PWM控制策略
PWM产生机制采用上下桥前60º PWM后60º ON的斩波方式见图4,该控制策略非常有利于桥臂上6只IGBT均衡发热,能有效延长IPM的使用寿命。

图3 逐渐展开的PWM信号

图4 PWM波形
2.3 提前角和转速计算
通过转换为时间量值来实现提前角,而该时间量和转速经过DSP的捕获口间接完成,霍耳位置传感器输出的位置信号经CPLD处理后为60º的方波信号,有效提高了位置信号的精度。CPLD内部译码程序为:
SS=(SA+/SB+/SC)*(/SA+SB+/SC)* (/SA+/SB+SC)
捕获口测得刚转过60º电角度的时间为T,则提前θ角的时间为(/60Tθ×),提前角不能超过60º电角度,否则提前已经没有意义。转速的计算公式为:

式中:n——捕获单元捕获值;TSP——捕获单元定时器输入时钟预定标系数;T——DSP控制器系统时钟周期(s);P——电机极对数。
2.4 软件流程
整个控制系统软件由主程序和中断子程序组成,系统软件流程见图5。其中,图5(a)为系统软件的主程序流程。主程序用来完成系统的初始化、获取控制命令、电机软启动、A/D电流采样等。图5(b)、5(c)为CAP1~CAP3捕获中断子程序和CAP4捕获中断子程序流程。CAP1~CAP3捕获用于获得换向时刻,并根据当前换向控制字进行换向。CAP4捕获中断则用于计算当前转速及设定提前角所对应的时间。
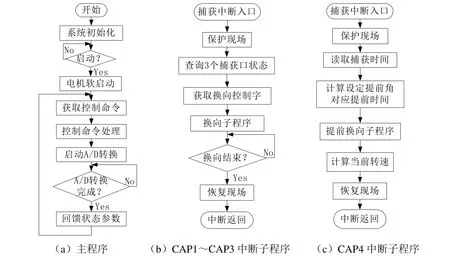
图5 系统软件流程
3 试验结果
试验用无刷直流电机基本参数为:额定功率12kW、4对极、额定电压118V、额定电流110A、额定转速2400r/min。试验波形见图6。从图6(a)可知,控制算法中加入提前换向角后,反电势波形滞后位置信号波形,即换向点提前,这样有利于改善逆变器输出U、V、W三相的电流波形(见图6(b)),已接近最佳状态,使电机本身的损耗减小,提高电机的效率。而随着提前角的变化(见图6(c)),输出电流波形也将发生改变。无提前角时,换向点稍微有点滞后,从而导致电流波形尖峰比较高,使效率有所降低;比如加12º提前角后,换向点提前,电流波形得到明显改善,效率有所增加;再如增大提前角为25º,电流尖峰开始变大。需要说明的是,不同的电机本体,需要提前换向的角度不同;不同功率点,需要提前换向的角度也不同,具体提前角的大小,应根据试验调整确定,依据是使电流波型平直和电机系统效率最大。

图6 试验波形
4 结 语
本方案设计的无刷直流电机控制系统,采用提前换向控制算法实现了无刷电机的高效率运行,电机系统效率高达 92%(PWM100%占空比下测定)。该控制系统简化了硬件设备,运行可靠,获得了满意的试验运行效果,该控制系统可用作为相关水下航行体(如蛙人输送艇、电动力鱼雷等)的无刷直流电机控制装置。
[1] 徐 宇,傅惠南,刘 凯.基于TMS320F2812的无传感器无刷直流电机控制器设计[J].机电工程技术,2013,42(6): 35-39.
[2] 宰文姣.无刷直流电动机驱动控制电路的设计和实现[J].微特电机,2013, 41(1): 54-56,62.
[3] 白 云,郭阳宽,祝连庆,等.基于DSP的无刷直流电机速度控制系统设计[J].制造业自动化,2013,35(1): 15-17.
[4] 王海军,郭文生.水下航行器推进用永磁直流无刷电机全数字控制系统设计与实现[J].水雷战与舰船防护,2012,20(3):11-15.
[5] 贺 磊,徐国华,刘亚平.水下机器人关节电机驱动系统研究[J].机电工程,2013,30(1): 77-80,89.
[6] 杜 军,张林森,赵 军.一种基于电压脉冲注入的对转无刷直流电机起动方法[J].鱼雷技术,2013,21(2): 137-140.
[7] 呼明亮,邱建琪,史涔溦.基于dSPACE的无刷直流电机控制系统[J].微电机,2011,44(4): 60-63,94.