用旋转不变技术实现互耦和通道不一致的联合抑制
2014-04-21刘坚强李国林杨继坤
王 凌,刘坚强,李国林,张 真,杨继坤
(1.海军装备研究院,上海 200235; 2.海军航空工程学院七系,山东烟台 264001)
用旋转不变技术实现互耦和通道不一致的联合抑制
王 凌1,刘坚强1,李国林2,张 真2,杨继坤2
(1.海军装备研究院,上海 200235; 2.海军航空工程学院七系,山东烟台 264001)
阵元间的互耦和通道的不一致都会对阵列流型产生扰动,使得子空间类估计算法性能急剧下降甚至失效,而传统多误差联合自校正算法存在多维搜索、迭代寻优和计算量庞大等问题.针对上述问题,提出了一种新的利用旋转不变技术实现两种阵列误差联合抑制算法.该算法根据互耦系数矩阵特点,通过通道的切换和子阵的选取,使得两子阵的阵列流型矩阵在误差扰动下仍然保持旋转不变关系,将ESPRIT算法应用背景推广至互耦和通道不一致同时存在的情形.该算法无须谱峰搜索和估计误差参数,阵列误差的抑制无须任何额外计算量.仿真验证了这种算法能够抑制互耦和通道幅相误差,估计性能和无误差时的标准ESPRIT算法接近.
阵列信号处理;波达方向;阵列通道误差;互耦;阵列校正;参数估计
空间谱估计技术因其拥有高分辨率和高测向精度等优点在近几十年得到丰富与发展,在航空航天、移动通信和军事侦察与干扰等领域成为国内外学者广泛关注的前沿课题[1-3].目前,已经形成了以Schmidt提出的MUSIC算法和Roy提出的ESPRIT算法为代表的子空间类算法理论体系,但现有的子空间类算法在阵列模型存在误差时(阵元间互耦、通道不一致和阵元位置误差)估计性能会严重下降[4-5],甚至失效.阵列误差将导致阵列流型矩阵产生扰动,理想的方向向量张成的信号子空间与噪声子空间之间将不再完全正交,子阵的信号子空间也不再满足旋转不变性.因此,阵列误差背景下低计算复杂度算法的实现成为阵列信号处理领域急需解决的热点问题,也是子空间类经典算法从理论走向工程实践的必然.
近年来,国内外学者针对阵列误差的校正与抑制问题进行了大量的研究[6-14].从校正的误差种类来看,可以分为单误差校正和多种误差联合校正;从校正的方法来区分,可以分为有源离线校正方法[6-7]和在线自校正方法[8-14].有源离线校正算法需要在空域设置已知精确方位的辅助信源,或是已知多个辅助信源之间的方位差,这样无疑增加了操作负担,且当校正精度和辅助信源的入射方向相关时,辅助信源方向设置的误差也将严重影响最终的估计性能.同时,接收通道中的有源器件,如本振、放大器和滤波器等会随着环境、温度的变化使幅相特性发生变化,因此需要算法能实时在线抑制和校正阵列误差.
在机载、弹载和地基雷达系统中,可以在安装阵列天线后,通过后期调试来降低阵元位置误差对算法性能的影响.笔者主要考虑通道不一致和阵元间的互耦效应同时存在时的联合在线自校正.在众多自校正算法中,大部分都是针对某单一误差进行校正.文献[8-9]提出了一种利用附加阵元的互耦抑制方法,将互耦对方向向量的影响转化为一个与互耦系数相关的常数乘以方向向量,然后基于MUSIC思想进行谱峰搜索.文献[10-11]分别从校正互耦影响和校正通道幅相不一致方面论述了解决方法,但上述算法均不能推广至多误差联合校正.目前针对多误差的联合自校正问题,公开文献资料[12-14]绝大部分都是将信源的波达方向和阵列的误差参数融合在一起,转化为多参量的非线性优化问题,这种思路无疑会导致出现多维搜索,容易陷入局部最优解或解不惟一的情况,且计算量庞大.虽然近几年出现了利用互耦系数矩阵的稀疏特性[12]和协方差矩阵的Toeplitz特性[13]对多维搜索过程进行优化,但没有从根上解决计算量大的问题,难以在工程实践中运用.
针对现有的多误差联合自校正算法中存在多维搜索、计算量大和不易工程实现等问题,在继电器处于不同状态下时,笔者根据互耦系数矩阵特点分别选取两个子阵,使得这两个子阵的阵列流型矩阵在互耦效应和通道不一致影响下仍然能保持旋转不变性,使得经典的ESPRIT算法在多阵列误差背景下仍能保持估计性能的稳健性.
1 阵列信号模型及问题
1.1 阵列信号模型
考虑空间有M个非相干的远场窄带信源入射到由N个全向阵元组成的均匀线性阵列上,如图1所示.M个入射信号s1(t),s2(t),…,sM(t)拥有相同的中心波长λ,波达方向分别为θ1,θ2,…,θM.天线阵列相邻阵元间距为d,考虑到避免估值模糊和简化分析的需要,取d=λ/2.阵列接收到的噪声为独立同分布的加性高斯白噪声,它们具有相同的方差σ2.天线阵列每个阵元的接收信号通过单刀双掷继电器的常闭触点接至相应的通道,定义此时为状态1,即阵元编号为1,2,…,N的阵元分别连接编号为1,2,…,N的通道.N个继电器的线圈共用输入输出端,给N个继电器线圈两端同时加电时,常开触点闭合,定义此时为状态2,即阵元编号为1,2,…,N的阵元分别连接编号为N,1,2,…,N-1的通道.各阵元的接收数据经过相应通道送至FPGA,FPGA进行时序控制,最终将接收数据送至后端数字信号处理器进行高速处理.
均匀线性阵列的互耦系数模型可以用一个带状的对称Toeplitz矩阵来描述.考虑L个阵元间的互耦影响,即对于阵列中第k个阵元,互耦效应来自于编号为(k-L+1),…,(k-1),(k+1),…,(k+L-1)的阵元.此时互耦系数矩阵C可表示为

其中,T(c)表示由互耦矢量c形成的对称Toeplitz矩阵,c为N维矢量,且有

在同一相干时间内,对于状态1时,阵列的接收数据可以表示为


图1 阵列系统模型
为N×M维阵列流型矩阵,a(θi)为对应的方向向量,且有

式(3)中,Γ1=diag[g1exp(jφ1),g2ex p(jφ2),…,gNexp(jφN)],为通道幅相误差矩阵,其中gk(k=1,2,…,N)为幅度误差因子,φk(k=1,2,…,N)为相位误差因子,并且满足g1exp(jφ1)=1;S(t)=[s1(t),s2(t),…,sM(t)]T,为M个入射信号矢量;N1(t)=[n1(t),n2(t),…,nN(t)]T,为阵列噪声矢量.
对于状态2,阵列的接收数据可以表示为

其中,Γ2=diag[gNexp(jφN),g1exp(jφ1),g2exp(jφ2),…,gN-1exp(jφN-1)],为继电器线圈加电后阵元和通道的对应状态.
1.2 问题
以往的通道不一致和互耦的联合自校正算法都是将波达方向和误差参数的联合估计问题转化为多参量的非线性优化问题,然后通过估计得到的误差参数利用MUSIC算法进行谱峰搜索得到最终的波达方向.这种思路存在两个问题:一是非线性优化问题自身就存在运算量大、容易陷入局部最优解或解不惟一等缺陷;二是此类算法估计得到误差参数后,仍需利用MUSIC算法进行搜索,进一步增加了计算量.
ESPRIT算法因为无须谱峰搜索,相较于MUSIC算法,大幅降低了计算量.查阅公开发表文献,目前尚无将旋转不变思想运用于多误差自校正的文献.从式(3)可以看出,当模型中存在误差时,将阵列划为子阵1和子阵2,其中子阵1无误差时的阵列流型矩阵为A1(A的前N-1行),子阵2无误差时的阵列流型矩阵为A2(A的后N-1行),此时A2=A1Φ.但当考虑阵列误差时,旋转不变关系将不再成立,即

其中,C1和Γ11为子阵1的互耦系数矩阵和幅相误差矩阵,C2和Γ12为子阵2的互耦系数矩阵和幅相误差矩阵.
2 用旋转不变思想实现互耦和通道不一致的联合自校正
2.1 算法描述
对于状态1,取编号L,L+1,…,N-L的阵元为子阵1.对于同一相干时间内的状态2,取编号L+1,L+2,…,N-L+1的阵元为子阵2.(N-2L+1)×N维选择矩阵J1和J2分别表示为

则子阵1和子阵2的接收数据分别表示为

根据矩阵理论,存在下述关系式:
注意到J1C的最右一列元素全为0元素,J2C的最左一列元素全为0元素,则式(12)和式(13)可写成如下形式:



先将两个子阵的模型进行合并,即求得合并后接收数据X的协方差矩阵,并进行特征分解,得到大特征值对应的特征矢量张成的信号子空间US.又因为US和由扩展阵列流型张成的空间相等,则存在下述关系式:

由上式可得信号子空间之间满足下列关系式:

显然Ψ与Φ有同样的特征值,即对Ψ进行特征值分解就可得到Φ,从而得出各个信号的波达方向θ1,θ2,…,θM.由上述推导可知,上述算法是一种在互耦和通道幅相不一致影响下的稳健算法,通过子阵的选取和通道的选择,能够利用旋转不变关系成功地实现多误差的联合抑制.与传统算法相比,计算量大幅降低,易于工程实现.
如果需要估计误差参数,此时波达方向与多误差参数的联合估计问题已经转化为已知波达方向下的阵列误差估计问题.此时,可以得到无误差的阵列流型矩阵估计值,考虑误差后的实际阵列流型为CΓ1,在状态1时接收数据X(1)(t)的协方差矩阵对应的信号子空间为S,则对S进行最小方差(Least Square,LS)拟合,互耦系数和幅相误差的估计可由下式的约束优化问题求解得到:

2.2 算法步骤
下面给出互耦效应和通道不一致条件下稳健的波达方向估计算法:
(1)在继电器处于常闭触点(接通状态)时,获取阵列天线系统子阵1的快拍数据向量X1(t);
(2)对继电器线圈同时加电,常开触点闭合,此时获取子阵2的快拍数据向量X2(t);
(3)按式(23)合并子阵观测数据,并求得相应的协方差矩阵;
(4)对协方差矩阵特征分解,得到信号子空间US,并按式(24)进行分块;
(5)根据旋转不变思想利用式(26)得到信号子空间之间的旋转不变关系Ψ;
(6)对Ψ特征分解,计算各信源的波达方向.
3 数值仿真
仿真环境为:阵列接收天线是阵元数为15的均匀线阵,各个通道具有不同的幅相误差,各幅度因子为[1,1.1,0.5,0.6,0.9,0.88,1.5,1.2,1.3,1.4,1.6,0.8,0.4,0.3,1.4],相位因子为[0°,10°,20°,30°,40°,50°,60°,33°,56°,-20°,-30°,-51°,-67°,20°,-10°].仿真中考虑3个阵元间的互耦影响,即L=3,互耦系数分别为c0=1,c1=0.433 01+0.25i,c2=0.141 42+0.141 42i,第i个信号的信噪比定义为,其中表示第i个信号的功率.角度的搜索区间为[-90°,90°],搜索步长为1°.
3.1 对经典子空间类算法性能的影响
仿真1 首先验证当多误差同时存在时对经典的MUSIC算法估计性能影响的程度.3个不相干信号的波达方向分别为-10°,30°,60°,信噪比为10 d B,快拍数为500.图2所示就是MUSIC算法在阵列误差影响下得到的空间谱,图中同时对比了不考虑阵列误差和已知阵列误差时的估计结果.从对比可以明显看出,经典的子空间类算法在阵列误差的影响下,估计性能急剧下降,且估计得到的结果相较于无误差时产生了较大偏差.这一点从理论上容易解释,因为此时用于谱峰搜索的方向向量为a(θ),而实际的方向向量为CΓ1a(θ).当已知互耦系数矩阵和阵列的通道幅相误差时,将CΓ1a(θ)作为方向向量进行谱峰搜索,从图中加点线得到的估计结果可以看出,此时估计性能相较于标准MUSIC算法下降不大.但在实际环境中,误差参数的估计计算量很大,且在某些条件下误差参数不容易获得,导致经典子空间算法失效.笔者将经典子空间算法中的ESPRIT算法推广到了多阵列误差背景.下述仿真将定量说明笔者提出算法的估计性能.
3.2 算法性能验证
仿真2 仿真参数与仿真1的完全相同,在0到20 dB的不同信噪比下分别进行了100次蒙特卡罗仿真统计试验,得到图3所示的笔者提出算法的波达方向估计均方根误差随信噪比变化的情况.在仿真中加入了不考虑互耦和通道误差时的ESPRIT算法和受其影响的ESPRIT算法作为比较.信源波达方向估计精度用均方根误差(RMSE)来表示,定 义为式中P为蒙特卡罗试验次数,ij表示第j次试验的第i个信号的估计值,M为信源数.从仿真结果可知,笔者提出的互耦和通道幅相误差存在下的ESPRIT算法能够成功地抑制多误差的影响,估计性能明显优于直接受阵列误差影响的ESPRIT算法,且接近无误差的ESPRIT算法.因此,笔者成功地将旋转不变技术推广至互耦和阵元通道幅相误差同时存在的情形,能够同时抑制互耦和幅相误差.
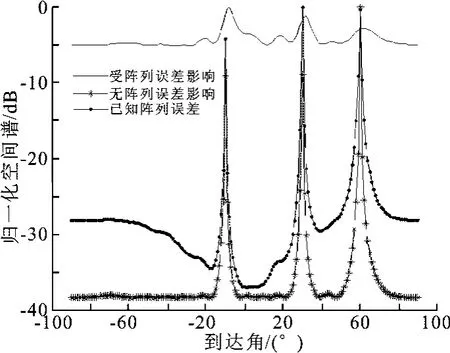
图2 阵列误差影响下的MUSIC算法估计性能对比图

图3 估计误差随信噪比变化曲线

图4 估计误差随快拍数变化曲线
仿真3 为了进一步说明笔者提出算法的估计性能,固定信噪比为10 d B,在200次到1 200次的不同快拍下分别进行了100次蒙特卡罗仿真统计实验,其他仿真参数与仿真1的相同,得到图4所示笔者提出算法的波达方向估计均方根误差随快拍数变化的情况.在仿真中,加入了无误差时的标准ESPRIT算法作为比较.从图4可以进一步看出,笔者提出算法能够抑制阵列误差对子阵阵列流型矩阵间旋转不变性的扰动,估计性能接近于无误差时的标准ESPRIT算法.在10 dB信噪比下,笔者提出算法估计结果的均方根误差能控制在1°以内,且随着快拍数的增加,误差逐渐减小.当快拍数增加到900次后,误差变化趋于收敛,快拍数的变化对均方根误差影响减小.
4 总 结
以往的多误差联合自校正算法都是将波达方向和多种阵列误差参数作为一个整体转化为多参量的非线性优化问题,这种思路因为其庞大的计算量使其只是停留在理论研究阶段.经典子空间类算法中的ESPRIT算法无须谱峰搜索,计算量较小,但在两种阵列误差的影响下,信号子空间将不再满足旋转不变性.笔者利用互耦系数矩阵特点,通过通道的切换和子阵的选取,使得两个子阵的受阵列误差扰动的阵列流型矩阵之间仍然保持旋转不变关系,因此将ESPRIT算法的应用背景成功地推广至互耦和阵列通道幅相不一致同时存在的情形.相较于传统算法,笔者提出的算法从内部机制抑制互耦效应和幅相不一致的影响,两种阵列误差的抑制无须任何额外计算量,也无须估计两种阵列误差.从仿真结果可知,笔者提出的算法估计精度高,估计性能明显优于直接受两种阵列误差影响的ESPRIT算法,且接近于无阵列误差时的标准ESPRIT算法.
[1]胡增辉,朱炬波,何峰,等.互耦条件下均匀线阵DOA盲估计[J].电子与信息学报,2012,34(2):382-387. Hu Zenghui,Zhu Jubo,He Feng,et al.Blind DOA Estimation in the Presence of Mutual Coupling Using Uniform Linear Array[J].Journal of Electronics&Information Technology,2012,34(2):382-387.
[2]张志成,石要武.基于子空间辨识的DOA和频率联合估计算法[J].北京理工大学学报,2012,32(1):77-81. Zhang Zhicheng,Shi Yaowu.Algorithm for Joint Direction-of-arrival and Frequency Estimation Based on Subspace Identification[J].Transactions of Beijing Institute of Technology,2012,32(1):77-81.
[3] 郭艺夺,张永顺,张林让,等.双基地MIMO雷达收发阵列互耦条件下目标定位方法[J].西安电子科技大学学报,2011,38(6):94-101. Guo Yiduo,Zhang Yongshun,Zhang Linrang,et al.Target Localization Method for Bistatic MIMO Radar in the Presence of Mutual Coupling of Receiver and Transmitter Arrays[J].Journal of Xidian University,2011,38(6):94-101.
[4]Swindlehurst A,Kailath T.A Performance Analysis of Subspace-based Methods in the Presence of Model Error:PartⅠ-The MUSIC Algorithm[J].IEEE Transactions on Signal Processing,1992,40(7):1758-1774.
[5]Weiss A J,Friedlander B.Effects of Modeling Errors on the Resolution Threshold of the MUSIC Algorithm[J].IEEE Transactions on Signal Processing,1994,42(6):1519-1526.
[6]See C M S.Sensor Array Calibration in the Presence of Mutual Coupling and Unknown Sensor Gains and Phases[J]. Electronics Letters,1994,30(5):373-374.
[7]Ng B C,See C M S.Sensor Array Calibration Using Maximum-likelihood Approach[J].IEEE Transactions on Antennas and Propagation,1996,42(6):827-835.
[8]Ye Z,Liu C.On the Resiliency of MUSIC Direction Finding Against Antenna Sensor Coupling[J].IEEE Transactions on Antennas and Propagation,2008,56(2):371-380.
[9]Ye Z,Liu C.2-D DOA Estimation in the Presence of Mutual Coupling[J].IEEE Transactions on Antennas and Propagation,2008,56(10):3150-3158.
[10]司伟建,初萍,孙圣和.通道幅相不一致的实时校正方法[J].系统工程与电子技术,2011,33(10):2179-2183. Si Weijian,Chu Ping,Sun Shenghe.Real-time Calibration Method for Channel Amplitude-phase Mismatch[J].Systems Engineering and Electronics,2011,33(10):2179-2183.
[11]Weiss A J,Friedlander B.Eigenstructure Methods for Direction Finding with Sensor Gain and Phase Uncertainties[J]. Circuits,System&Signal Processing,1990,9(3):271-300.
[12]Jaffer A G.Constrained Mutual Coupling Estimation for Array Calibration[C]//Proceeding of the 35th Asilomar Conference on Signal,Systems and Computers.Piscataway:IEEE Computer Society,2001:1273-1277.
[13]Sellone F,Serra A.A Novel Mutual Coupling Compensation Algorithm for Uniform and Linear Arrays[J].IEEE Transactions on Signal Processing,2007,55(2):560-573.
[14]王鼎,吴瑛.多子阵互耦影响下的鲁棒自校正算法[J].系统工程与电子技术,2011,33(6):1204-1211. Wang Ding,Wu Ying.Robust Self-calibration Algorithm for Multiple Subarrays in Presence of Mutual Coupling[J]. Systems Engineering and Electronics,2011,33(6):1204-1211.
(编辑:郭 华)
Joint calibration algorithm in the presence of mutual coupling and channel discord via rotational invariance techniques
WANG Ling1,LIU Jianqiang1,LI Guolin2,ZHANG Zhen2,YANG Jikun2
(1.Navy Academy of Armament,Shanghai 200235,China; 2.No.7 Dept.,Naval Aeronautics and Astronautics Univ.,Yantai 264001,China)
The performance of subspace estimation algorithms degrades substantially in the presence of mutual coupling and channel discord by the perturbance of the steering matrix.Classical self-calibration algorithms need multidimensional search,optimization and iteration,and large calculation quantity.In order to avoid these shortcomings,a novel joint calibration algorithm using rotational invariance techniques is proposed in this paper.Two sub-arrays’steering matrix can maintain the rotational invariance property in the presence of array errors by switching channels and selecting sub-arrays according to the characteristic of the mutual coupling matrix.So,the estimation of signal parameters via rotational invariance techniques(ESPRIT)algorithm is applicable to mutual coupling and channel discord scenarios.The algorithm requires neither searching the spectrum peak nor estimating error parameters,and the calibration of array errors does not need an additional calculation quantity.Simulation results show that the proposed algorithm can restrain mutual coupling and channel discord.The performance of the algorithm is equivalent to the performance of the standard ESPRIT algorithm without errors.
array signal processing;direction of arrival;array channel error;mutual coupling;array calibration;parameter estimation
TN911.23
A
1001-2400(2014)01-0182-07
10.3969/j.issn.1001-2400.2014.01.032
2012-05-23 < class="emphasis_bold">网络出版时间:
时间:2013-09-16
国家自然科学基金资助项目(60902054);中国博士后科学基金资助项目(201003758,20090460114);“泰山学者”建设工程专项经费资助项目
王 凌(1985-),男,工程师,博士,E-mail:wang_ling1@yeah.net.
http://www.cnki.net/kcms/detail/61.1076.TN.20130916.0926.201401.226_028.html