张拉整体结构振动最优控制的作动器优化配置
2014-04-21李团结
江 洁,李团结
(1.红河学院工学院,云南蒙自 661100; 2.西安电子科技大学机电工程学院,陕西西安 710071)
张拉整体结构振动最优控制的作动器优化配置
江 洁1,2,李团结2
(1.红河学院工学院,云南蒙自 661100; 2.西安电子科技大学机电工程学院,陕西西安 710071)
将模拟退火算法应用于张拉整体结构作动器的优化配置中,分析了作动器位置对于结构振动控制的影响.利用有限元软件建立了4层张拉整体结构的有限元模型,通过对张拉整体结构的动力学方程进行模态变换和模态截断,推导出了结构控制的状态空间方程.在结构振动最优控制的基础上,选取与结构作动器位置相关的系统的能量为优化指标,采用模拟退火算法对张拉整体结构的作动器位置进行优化配置.仿真结果表明,将作动器布置于优化解的位置时,振动控制性能得到了明显提高,证明了该方法的有效性,
张拉整体结构;振动控制;作动器;最优控制;模拟退火算法;优化配置
张拉整体结构是近几年来在国内外迅速发展起来的一种新型的自应力自平衡的空间结构体系,它由连续的受拉单元以及包含于受拉单元内部的不连续的受压单元组成[1].目前,张拉整体结构正逐渐地应用于航天技术、机器人工程及生物工程等高新技术领域.张拉整体结构具有质量轻、模态频率低且密集、阻尼小等特点,很容易受到地震、风振、机械振动以及冲击荷载等外界激励的干扰而发生较高水平的振动,当这些振动超过一定限度时会对结构的功能与安全造成不利的影响,需要采取一定的措施加以控制.
近年来,大型柔性空间结构振动控制问题引起了很多学者的关注[2-3],具有柔性特质的张拉整体结构也不例外[4-5].结构振动主动控制中的一个重要的问题就是确定作动器的数目与位置,以最少的数目、最佳的位置实现控制目的.目前,对于作动器数目的研究还不充分,技术思路还不清楚,这主要是因为作动器的数目对于不同的控制器和控制要求是难以决定的[6].而对于给定作动器,确定它们最优位置的研究则展开的比较充分.
笔者采用压电陶瓷(PZT)作为张拉整体结构的作动器,建立了4层张拉整体结构的有限元软件(ANSYS)模型,由结构的动力学方程推导出了其状态空间方程.以系统能量为优化准则,在结构振动线性二次型调节器(LQR)最优控制的基础上,采用模拟退火算法对张拉整体结构作动器的位置进行了优化配置.
1 张拉整体结构的状态空间描述
将PZT作动器集成在张拉整体结构的杆件中,形成自适应张拉整体结构.考虑了作动器对整体结构的影响,以作动器的作动电压为控制变量,建立张拉整体结构的ANSYS有限元模型[7],推导的结构无阻尼动力学方程为

其中,M为结构的质量矩阵,K为结构的刚度矩阵,F1为结构作动器点荷载矩阵,F2为外力荷载矩阵,σ为节点位移向量,w为外部激励向量,u为作动器输出位移向量.
利用如下模态变换[8]:

其中,q为n维模态坐标矢量,Φ为正则模态矩阵.将式(2)代入式(1),得到系统的模态方程为

由正则化条件可知:ΦTMΦ=In,ΦTKΦ=diag(w2i),wi(i=1,2,…,n)为固有频率.由于低阶模态在振动中起主导作用,故截取前r阶低阶模态,得到系统的低阶模态方程为

其中,Ωr=φTKφ,F1r=φTF1,F2r=φTF2,φ为前r阶截断正则模态矩阵.取模态位移与模态速度为状态量,即

将式(4)转化为振动控制状态空间方程为

2 线性二次型最优调节器的设计
已知线性定常系统式(6),寻求最优控制u*,使系统的二次性能指标

取极小值,其中,Q和R分别为对状态和控制变量的加权矩阵,且Q为非负定对称矩阵,R为正定对称矩阵.
若控制u不受约束,则最优控制存在,且惟一地由下式确定:

其中,K1为状态反馈增益,P是代数黎卡提方程:

的非负定对称解[9].
将式(8)代入式(6),可得闭环系统的状态方程为


其中,x0为结构的初始状态.
3 模拟退火算法及其实现步骤
模拟退火算法[10](Simulated Annealing,SA)最早由Metropolis在1953年提出,1983年Kirkpatrick等成功地将退火思想引入到组合优化领域,其出发点是基于物理中固体的退火过程与一般组合优化问题之间的相似性.SA在某一初温下,伴随温度参数的不断下降,结合概率突跳特性,在解空间中随机寻找目标函数的全局最优解,即在局部最优解能够概率性地跳出,并最终趋于全局最优.
模拟退火算法包含的基本步骤如下:
(1)随机产生一个初始解x0,令xbest=x0,并计算目标函数值E(xbest).
(2)设定起始温度T=T0,迭代次数i=1.
(3)按照生成函数g(Δx,T)确定的概率选择Δx,产生新解xnew,并计算新的目标函数值E(xnew).
(4)计算目标函数值的增量ΔE=E(xnew)-E(xbest),若ΔE<0,则xbest=xnew;若ΔE>0,则令如果c=ran d(0,1)<p(ran d(0,1)表示0~1之间的随机数),那么xbest=xnew;否则,xbest=xbest.
(5)按照退火时间表降低温度T.
(6)迭代次数增加,i=i+1,若i达到迭代次数,停止迭代;否则,返回步骤(3).
4 张拉整体结构作动器的优化设计
模拟退火算法应用于张拉整体结构作动器的优化,首先要讨论解空间与初始解、目标函数、初始温度、新解的产生函数的构造问题.
4.1 解空间与初始解
将张拉整体结构的m个压杆由1~m进行编号,用1行m列矩阵ax表示作动器的布置情况.元素ax(k)=1,表示第k个对应的压杆上已布置作动器,而ax(k)=0,则表示第k个对应的压杆上未布置作动器.若作动器数目为r,满足r≤m,则解空间S可表示为

初始解可选为满足解空间的任何一个ax.
4.2 目标函数
由于线性二次型最优控制理论的性能指标可以直接表示为系统的能量与控制能量之和,最小化该性能指标相当于同时最小化系统能量和控制能量.文中在控制系统优化设计中,选择系统的能量作为目标函数,对带有压电陶瓷作动器的张拉整体结构振动主动控制进行了研究.若t0=0,则能量表示式(7)可表示为

将式(11)和式(8)代入式(12),可得

由式(13)可知,能量函数与系统的初始状态有直接关系,为了消除初始状态对优化结果的影响,假定系统的初始状态x0在n维单位球面上随机分布[9],对于式(13)有

其中,Ac=A-BR-1BTP,Qc=Q+(R-1BTP)TR(R-1BTP).对式(14)求取关于初始状态x0的数学期望为


为了进一步对上述表达式进行计算,可引入

L可表述为Lyapunov方程的解,即

那么,修正后系统的性能指标可表示为

式(19)的性能指标具有一定的物理意义,即当系统的初始状态x0在n维单位球面上随机分布时,最小化修正后的性能指标式(19)等价于最小化性能指标式(13)关于初始状态x0的数学期望,且μ(L)n是性能指标式(13)的均值[11].
4.3 初始温度
初始温度的选取:通过对张拉整体结构作动器进行多次随机布置来产生一组状态,确定两两状态间存留能量指标的最大差值,然后依据差值,利用函数来确定初始温度,其中pr为初始接受概率.
4.4 新解的产生
设当前解为i(i∈S),从其对应的r个布置作动器的杆件(ax元素为1的位置)中随机选择一位,记其对应的杆件编号为i1,则有ax(i1)=1.同样,从未布置作动器的杆件(ax元素为0的位置)中随机选择一位,记其对应的杆件编号为i0,则有ax(i0)=0.交换ax(i1)与ax(i0)元素的值,则有ax(i1)=0,ax(i0)=1,即编号为i1的杆件变为无作动器杆件,而编号为i0的杆件变为有作动器杆件,从而形成了新解j(j∈S),即完成了从当前解i(i∈S)向新解j(j∈S)的转变.
5 结构作动器优化仿真
如图1和图2所示,12杆件54索张拉整体结构由4层柱状张拉整体单元叠加而成,外接圆半径为0.5774m,层间转角为30°,每层高度为1m,层间交汇高度为0.25m,锁上应力为1MPa.将张拉整体结构的12个压杆位置由1~12进行编号,并与杆件对应.表1为结构材料参数,表2为杆件与节点的对应关系.

图1 张拉整体塔节点定义
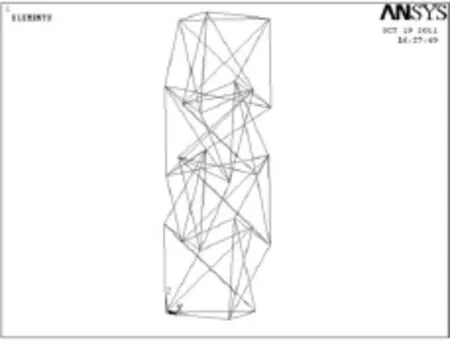
图2 张拉整体塔ANSYS模型

表1 结构材料参数

表2 结构杆件编号与节点位置的关系
张拉整体结构底部节点1、2和3固定,22、23和24这3个节点沿负Z方向(如图2所示)同时施加0.1 N冲击扰动,取R=I,在振动最优控制的基础上,运用模拟退火算法对结构主动杆件的优化配置状况进行研究.2,4,6,8,10个作动器优化配置结果如表3所示.

表3 作动器优化配置结果
从表3优化结果可以看出,随着作动器数目的增多,优化性能指标μ越小,说明作动器数目越多,控制性能越好.当作动器可能配置的位置比较多时,优化迭代次数也多.这是由于模拟退火算法是一种随机性搜索算法,在解范围扩大的情况下,求得最优解过程中迭代次数也会相应增加.同时可以发现,在多数目作动器布置时,为使得结构振动最优控制达到满意的状态,张拉整体结构的底层杆件应优先考虑布置作动器.
下面以两个作动器的优化配置为例,初始温度T0=3.746 9×106,降温系数为0.8,接受次数为18,拒绝次数为52,外循环次数为14,内循环次数为5,求解的最优位置为,对应杆件编号为3和6,最优目标值μ=5.852 1×104.
以两根驱动杆件为例,进行振动仿真分析,分别计算优化前与优化后张拉整体结构的振动位移响应变化.

图3 节点22的X方向位移
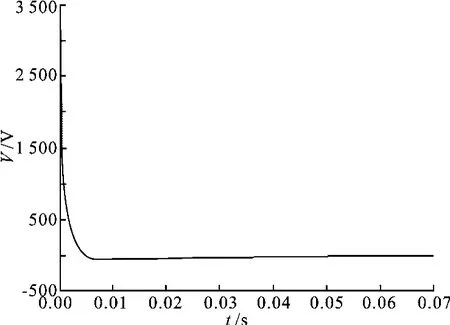
图4 8号杆件作动器的电压
从以上结果可以发现:优化前振动控制衰减很慢,衰减时间较长,在50 s以后,各节点均有较大幅度的振动位移;优化后振动控制位移衰减很快,在30 s内,各个节点振动均得到了很好抑制.优化前杆件作动器初始作动电压较大,但持续时间短;优化后杆件作动器初始电压较低,但持续时间长.
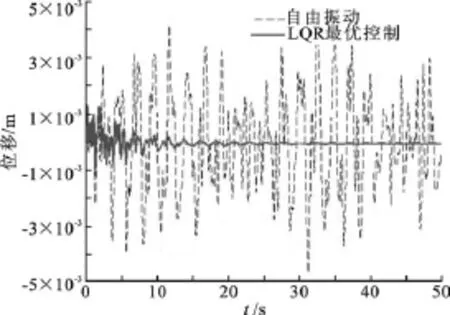
图5 节点22的X方向位移

图6 3号杆件作动器的电压
6 结束语
笔者建立了张拉整体结构的ANSYS模型,推导了其动力学方程,经过模态变换与模态截断,采用状态空间设计方法,应用LQR控制器实现对张拉整体结构振动的最优控制.以结构的能量为优化性能指标,将模拟退火算法应用于张拉整体结构主动杆件的优化配置中,在振动最优控制的基础上,完成了结构作动器的优化配置.通过两个杆件优化振动仿真结果对比可知,将作动器布置于优化解的位置时,振动控制性能得到了明显提高,表明了该方法对张拉整体结构的主动杆件可进行有效的优化配置.
[1]Motro R.Tensegrity:Structural Systems for the Future[M].London:Hermes Science Publishing Limitdd,2003.
[2]Yoshifumi S.Special Issue on LSS and Its Related Theory of Control in the Near Future-General Consideration[J]. Journal of the Society of Instrument and Control Engineers,1987,26(10):827-828.
[3]Balas M.Trends in Large Space Structure Control Theory:Fondest Hopes,Wildest Dreams[J].IEEE Transactions on Automatic Control,1982,27(3):522-535.
[4]Li Tuanjie,Wang Zuowei,Li Jin,et al.Distributed Vibration Control of Tensegrity Structure[J].Journal of Vibration and Control,2013,19(5):720-728.
[5]Li Tuanjie,Ma Yujuan.Robust Vibration Control of Flexible Tensegrity Structure ViaμSynthesis[J].Structural Control and Health Monitoring,2013,20(2):53-66.
[6]Baruh H.Placement of Sensors and Actuators in Structural Control[M].San Diego:Academic Press Incorporated,1992:359-390.
[7]Moaveni S.Finite Element Analysis:Theory and Application with ANSYS[M].Second Edition.San Antonio:Pearson Prentice Hall,2008.
[8] 程耀东,李培玉.机械振动学[M].杭州:浙江大学出版社,2005.
[9] 解学书.最优控制——理论与应用[M].北京:清华大学出版社,1986.
[10]康立山,谢云,尤矢勇,等.非数值并行算法——模拟退火算法[M].北京:科学出版社,1998.
[11]Kleinman D L,Athans M.The Design of Suboptimal Linear Time-Varying Systems[J].IEEE Transactions on Automatic Control,1968,13(2):150-159.
(编辑:齐淑娟)
Actuator placement optimization of optimum vibration control for tensegrity structures
JIANG Jie1,2,LI Tuanjie2
(1.Engineering College,Honghe Univ.,Mengzi 661100,China; 2.School of Mechano-electronic Engineering,Xidian Univ.,Xi’an 710071,China)
The simulated annealing algorithm is employed to implement the actuators placement optimization for a tensegrity structure,and the effect of actuator positioning on the vibration control of the structure is analyzed.To this end,the ANSYS model of a 4-floor tensegrity structure is built,and the state space control equation of the structure through mode transform and mode truncation is deduced.Based on optimal vibration control for the tensegrity structure,the energy of the system with respect to actuator locations is chosen as the optimal criterion.Simulation results indicate that the optimization method is effective,and that the performance of vibration control of the tensegrity structure is improved dramatically when actuators are placed in the optimal position.
tensegrity structure;vibration control;actuators;optimal control;simulated annealing algorithm;optimal placement
TH113.1;TP273.1
A
1001-2400(2014)01-0170-06
10.3969/j.issn.1001-2400.2014.01.030
2012-10-24 < class="emphasis_bold">网络出版时间:
时间:2013-09-16
国家自然科学基金资助项目(51375360)
江 洁(1981-),女,讲师,西安电子科技大学博士研究生,E-mail:jiangjie_uoh@163.com.
http://www.cnki.net/kcms/detail/61.1076.TN.20130916.0926.201401.210_026.html
