整体式啤酒花收获机械的机构设计及参数优化
2014-04-16阎树田张得俭
□ 李 战 □ 阎树田 □ 张得俭
1.兰州理工大学 机电工程学院 兰州 730050
2.甘肃省机械科学研究院 兰州 730030
国外啤酒花收获机械的生产主要以大机械长生产线为主,造价比较高而且不是很适应中国的作物特性和种植模式。国内机械存在着结构粗糙、生产周期长、效率低等一系列问题。
啤酒花所含有的甲酸是啤酒产业中必不可少的原料之一[1],目前我国每年有相当量的原料进口,制约其产业发展的主要因素之一是啤酒花收获机械的性能不够理想。针对我国啤酒花品种(青岛大花)的物理性能,由甘肃省机械科学研究院改良设计的金科源生产的5PZX-600啤酒花收获清选机组,摘花性能和清选效果都满足了一定的要求,但是在生产实践中,鉴于啤酒花最佳采摘期的时间及生产过程中各项试验数据表明,该机型还是存在一些问题[2],如生产率低、夹带损失过大等。因此,在基于5PZX-600型机械的基础上,提出整体式啤酒花收获机械[4、5]的优化设计,以达到缩短生产周期、提高生产效率、降低生产成本、提高清选性能等目的。
1 工作原理
啤酒花收获机械的工作原理已基本成熟,摘花方式有弹片扣花和弹齿滚筒扣花等,清选主要是风选[3]。
针对目前各种机械存在的问题,以及我国大部分种植品种和种植模式,设计方案如图1所示。
2 主要参数、结构设计及优化分析
2.1 采摘结构参数的分析及设计
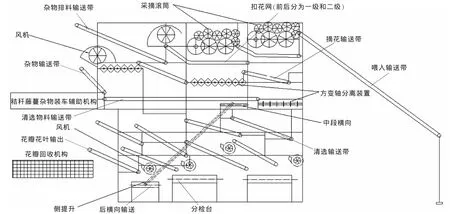
▲图1 设计方案图

▲图2 采摘功能结构工作简图
本设计采用比较成熟的弹齿滚筒扣花方式,功能结构如图2所示,根据试验数据和相关工作原理,物料经喂入结构进入采摘机构,滚筒转速n1、n2有一定的差速,通过这个差速,滚筒上的弹齿之间作相对运动,从而达到摘花的功能。
计算相关参数,确定采摘机构的结构尺寸。

式中:ρ为喂入量;Q为采摘生产率;B为喂入宽度;v为喂入速度;h为喂入厚度;△V为自然状态花果体积;k为配套系数,取1.1~1.2;△t为喂入冲击花果时间;△q为△t采摘花果量;q为单位时间采摘量;z为摘花弹齿排数;s为弹齿周节;D为摘花滚筒直径;F1为机器采摘力;F2为输送茎杆的力;F为总力大小;A为系数,取(0.2~0.3)×10-3与转动方式和轴承有关;B为系数,取(0.48~0.68)×10-6与共同转动时物料湿度有关;N为摘花总功率;N0为空载功率;Nt为摘花功率;γ为摘花系数,实验研究表明,取0.7~0.8;ω为摘花滚筒角速度。各物理单位未标注的均取ST单位。
在一定的生产率要求下,当ρ、B一定,改变v,适当调节h,可决定弹齿滚筒的直径大小。弹齿滚筒直径的大小也和其旋转速度有关,其直径是随着转速的提高而减小,实验证明,弹齿滚筒的旋转速度会影响啤酒花在采摘时的破损率,其破损率随着弹齿滚筒的转速提高而增大。因此,根据所要求的参数不同,所设计的结构尺寸会有一定的差异,通过试验及分析,进一步优化整体的结构参数。
2.2 清选机构的参数设计及优化
清选方式采用风选,其功能结构简图如图3所示,清选结构的主要尺寸由图3中的尺寸决定其大小,当物料从采摘系统进入清选系统时具有一定的速度v1x,自上而下计算各输送带的参数。
第1条输送带:

式中:△vi为第 i条输送带的线速度(i=1、2、3,…);g 为重力加速度;△L1s为物料在输送带上且在△t1时间的滑动距离;η1为不同物料在输送带1上对应的摩擦因数。
如果皮带长度△L1充分大于△L1s,即物料速度减速到零仍然未运动到输送带1的端点,此时物料将跟随输送带前进;否则物料则抛落到第2条输送带,此时速度为:,方向与 v1′同向,此时满足:

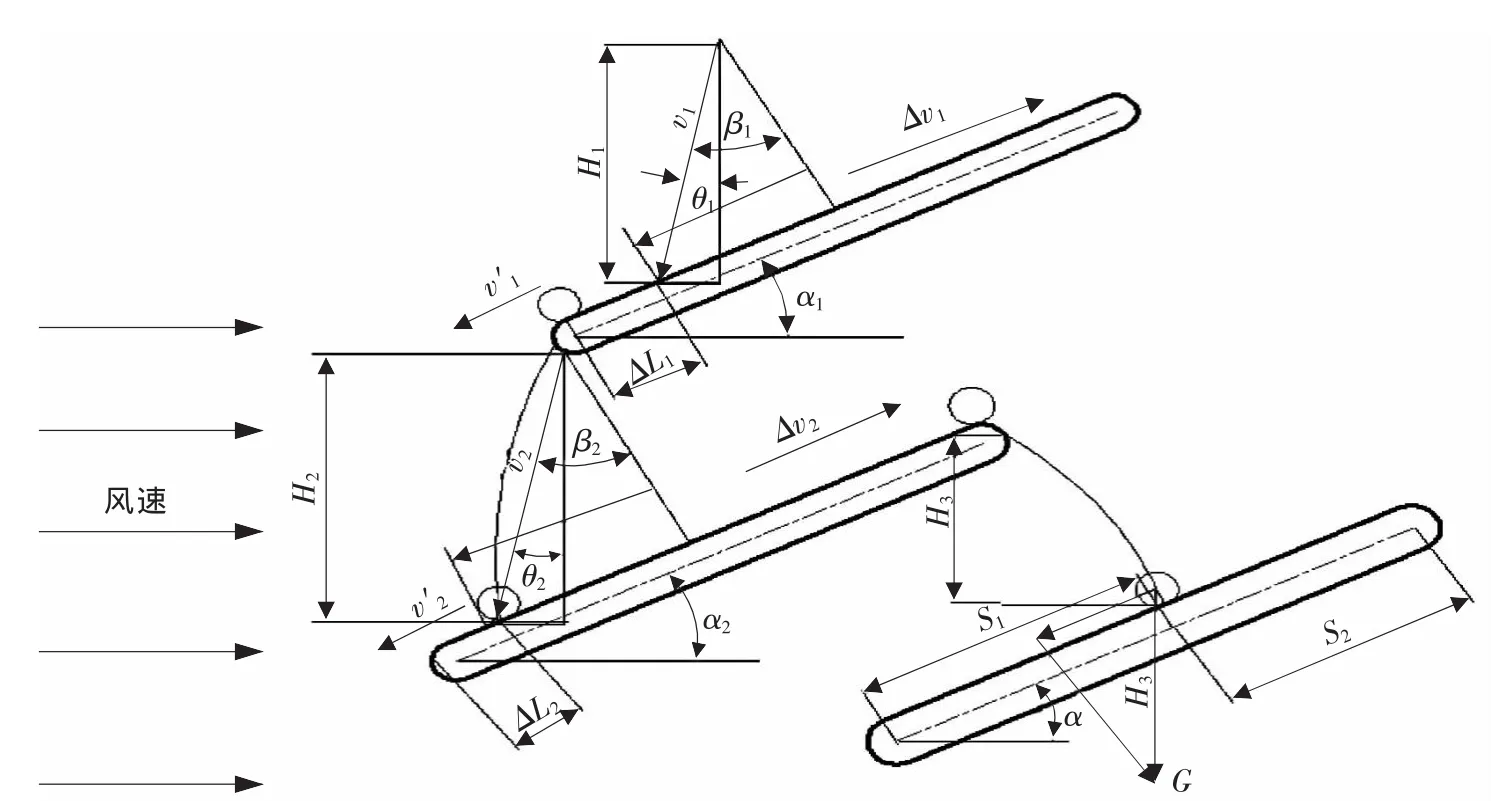
▲图3 清选功能结构简图

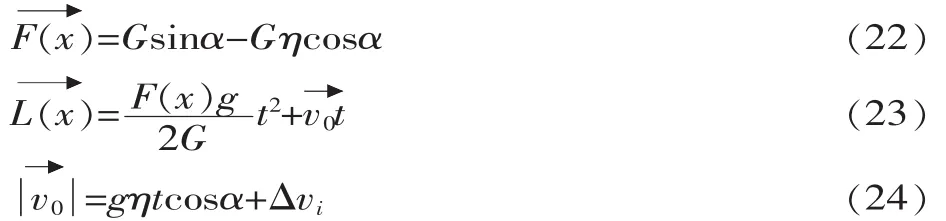
与第1条输送带的物料抛落到第2条输送带上的相同原理,那些随着输送带2运动的物料将在输送带尽头飞出,为了使物料能够落在第3条输送带上,则:

式中:vi′为物料到达第i条输送带时,沿第i条输送带方向的速度;v1x、v1y为vi在坐标X、Y方向的速度分量;vi为物料到达第i条输送带时的速度;θi为vi与竖直方向的夹角;βi为vi与第i条输送带的夹角的余角;△Li为物料到达第i条输送带的位置与其最近端点的距离;vi风为对应第i条输送带所处风场的风速;αi为第i条输送带与水平方向的夹角;Hi为从物料开始掉入下一个输送带与到达该输送带位置的垂直距离;△S3s为物料在落到第3条输送带上之前沿着输送带3方向在t3时间内的滑翔距离。
若△S3s大于输送带3在这个方向对应的长度,物料将直接跳过第3条输送带,也就少了一道清选工序,必然影响清选质量。试验数据表明,第3条在这个方向的有效长度比物料滑翔距离长出2/3的长度时,清选效果较好。
物料的清选能够达到理想的清选效果,除了以上条件还应满足以下情况:
由于不同的物料相对于输送带的摩擦因数不同,由以上计算和分析,必须满足以下约束条件:

式中:μ1为花果的滚动摩擦因数;μ2为叶蔓藤条等滑动摩擦因数;T为设计系数 (取1/3~2/3);Hi为物料从一输送带到相邻输送带下落垂直距离,mm。
由以上公式以及相关的试验数据表明:输送带的α角一般的取值范围为 23.75~45°(优选取 23.75~35.34°),输送带的长度L取1 000~1 700 mm具有良好的清选效果。通过相关信息优化分析得到几组较优解,见表1。

表1 输送带的几组较优解
通过以上参数的确定,对整体机器的参数规格进行了计算,同时考虑到安全系数和材料的加工工艺以及机器的可维修性,由此对本新型啤酒花收获机械的整体机构进行了设计。
花瓣回收振动装置,是在分离出花果之后根据不同的啤酒花品种选用的装置,一般情况下,青岛大花在采摘的时候花瓣脱落较多,需要使用该装置,其它品种可以根据实际生产情况选择。该装置主要采用振动筛,根据花瓣与花叶碎片的尺寸大小来决定筛网孔的尺寸,利用振动和重力的作用完成花瓣和花叶的分离。
本设计的优点和创新是使得花瓣与花叶分离能够与整个生产过程相融合,从而提高了本设计机械的整体自动化程度。
2.3 其它结构的参数确定
其它结构主要包括:采摘向清选过渡的连接部位、杂物分离部位。此类设计基本不影响总体布局和规格尺寸的变化,主要根据生产工艺进行确定,在此不作赘述。
3 结论
本设计是基于5PZX-600型机械进行优化设计,通过改变原有机型的工作布局和部分结构,从根本上减短了生产流程及生产时间,提高了生产效益,减少了劳动力的投入,降低了制造成本和生产成本。由此可见,具有良好的发展前景。
[1] 啤酒花及啤酒原料进出口统计表[J].啤酒科技,2012(4):70.
[2] 陈建东,郭辉,郭峰,等.啤酒花自动采摘机的结构设计及机理分析[J].农业开发与装备,2010(1):11-13.
[3] Adolf,Liepold,Schwarzenbruck,DT.Self-propelled Hop Harvesting Machine [P].United States Patent:3962851,1976-06-15.
[4] 杨静,张得俭,寇明杰 ,等.5PZX-600型啤酒花清选机结构方案的确定[J].凿岩机械气动工具,2008(4):10-13.
[5] 寇明杰,张得俭,韩少平.浅析啤酒花自动采摘机的结构设计[J].机械研究与应用,2005(4):5.
