PWM整流器数学建模及参数整定方法
2014-04-16王颖
王颖
(天津经济技术开发区汉沽现代产业区总公司,汉沽 300480)
有源前端AFE(active front end),在工程领域应用较广,学术研究中多采用脉宽调制PWM(pulse width modulation)整流器这一名称。和传统的二极管整流相比,AFE具有功率因数可控、网侧电流正弦度好、能量可双向流动、直流侧电压稳定、动态响应快等诸多优点,其应用日益广泛[1~4]。
对AFE的研究最早开始于20世纪80年代,自关断器件的日趋成熟推动了PWM技术在变流器上的应用及相关研究[5~6]。目前,针对AFE的研究主要包括数学建模与分析、主电路拓扑、系统控制策略研究等方面,其中数学建模和分析一直是AFE研究的热点问题。文献[7~8]在三相静止参考坐标系下建立了AFE的数学模型,并说明了其电流控制的原理;文献[9]针对AFE的稳态直流模型、低频小信号交流模型及高频模型做了全面分析,虽然分析过程完整、详细,但过于复杂,实际应用较为困难。
本文介绍了一种AFE系统建模方法[10],该方法考虑了AFE的开关函数,对电压、电流变量做采样周期内的平均值处理,得出了AFE在dq旋转坐标系下的平均值数学模型。基于上述模型,本文进一步研究了AFE的电流解耦控制方法,采用等效传函方法设计了电流环、电压环控制器参数,并进行了仿真验证。仿真结果表明,模型的电流控制实现了有功、无功电流分量的解耦,辅以合理设计的控制器参数,AFE系统具有良好的动、静态性能。
1 AFE系统数学模型
1.1 系统结构及静止坐标系方程
AFE整流器系统的拓扑结构如图1所示。图中,uga、ugb、ugc分别为电网相电压,ua、ub、uc分别为AFE输入端相电压,ia、ib、ic分别为AFE的输入三相电流,udc、idc分别为AFE直流侧电压、电流,L、R分别为AFE输入侧滤波电感及线路等效电阻,C为直流电容,iL、ZL分别为负载电流及等效负载阻抗。
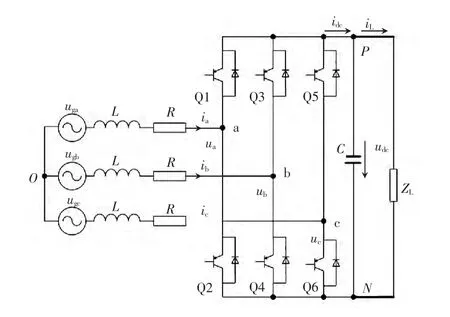
图1 AFE系统结构Fig.1 Structure of AFE system
为简化分析,通常对图1系统做如下假设:①电网电压理想,为标准三相正弦;②滤波电感L线性,不考虑饱和;③功率开关等效为理想开关。
根据上述假设,可得
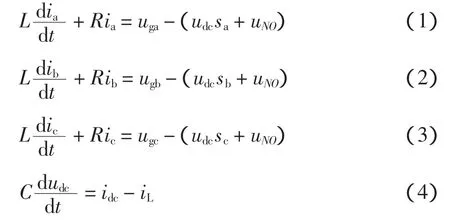
式中,sa、sb、sc分别为AFE三相桥臂的开关函数,功率器件开通时为1,关断时为0。则式(4)可改写为

由于三相对称,电网电压、电流应满足

联立式(1)~式(6),得

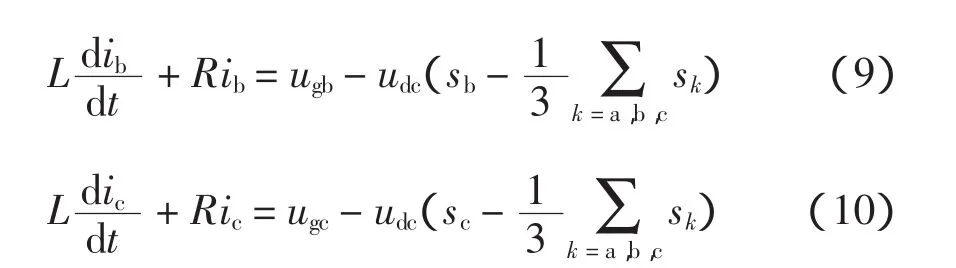
式(5)、式(8)~(10)描述了AFE交、直流侧的电压、电流关系,构成了AFE在静止坐标系下的数学模型。
1.2 旋转坐标系数学模型
静止坐标系下的数学模型,其电压、电流均为正弦量,控制系统设计较为复杂。采用等幅值旋转坐标变换将式(5)、式(8)~(10)变换至旋转坐标系dq,表达式为
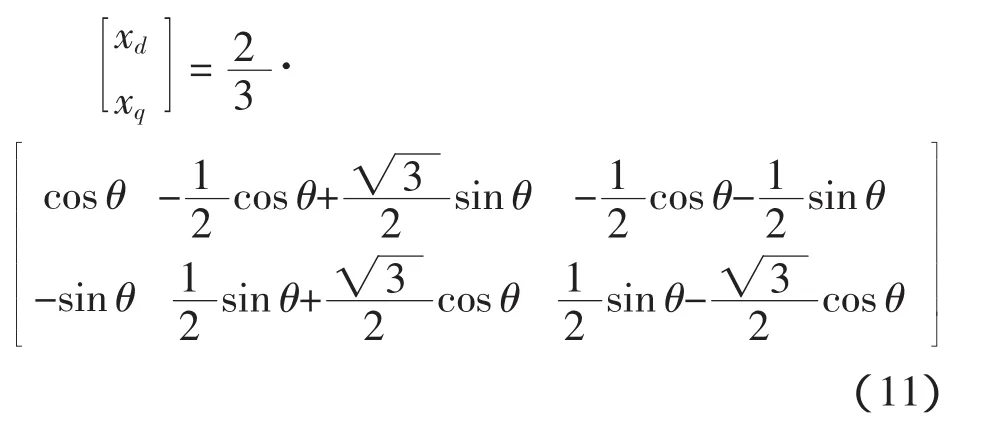
式中,θ为d轴超前于a相的角度。如果选取d轴和电网电压矢量ug同向,则θ通常由软件锁相环计算获得[11]。
旋转变换后的AFE数学模型为
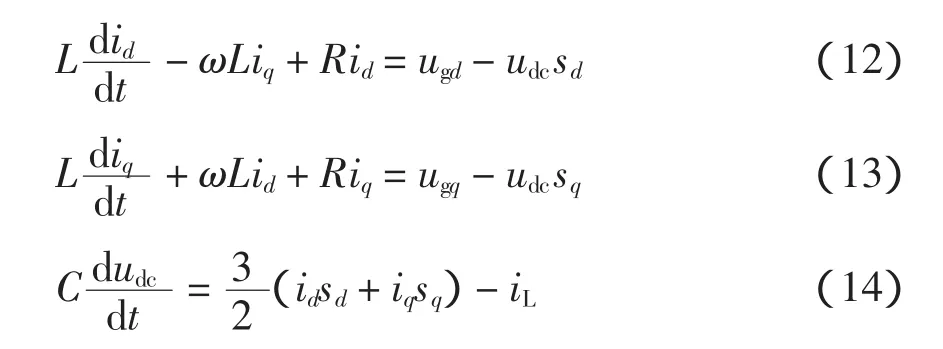
式中:ugd、ugq分别为电网电压dq轴分量,id、iq分别为AFE交流电流dq轴分量;ω为电网角频率,ω=dθ/d t;sd、sq分别为开关函数旋转变换后得到的占空比函数,稳态时sa、sb、sc的占空比按正弦规律变化,此时sd、sq为[-1,1]范围内的恒指常数。
由式(12)~式(14)得到dq坐标系下AFE系统的结构,如图2所示。
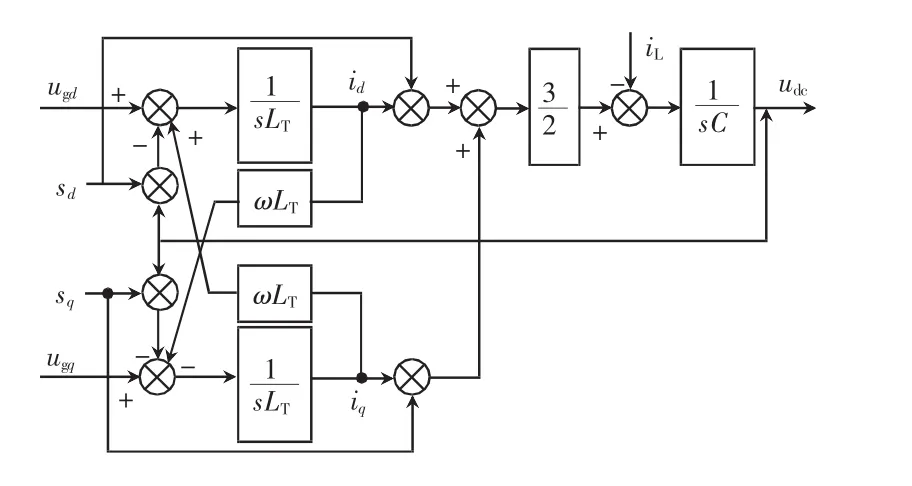
图2 dq坐标系下的AFE结构Fig.2 Structure of AFE in dq reference
2 AFE控制系统设计及参数整定
图2表明,调节sd、sq即可控制udc,电流id、iq相当于中间变量,为了实现较好的控制效果,需要对电压、电流分别设计控制器。
2.1 电流调节器设计
电流调节器采用常见的PI控制器。考虑到式(12)和式(13)中id、iq相互耦合,引入前馈解耦可以抑制其对控制的影响。解耦之后的电流调节方程为
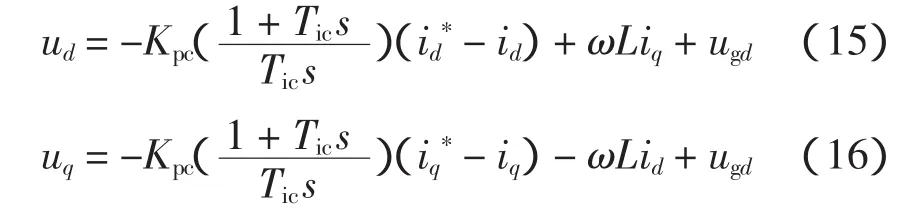
式中:Kpc、Tic分别为电流PI调节器的比例系数和积分时间常数。
根据式(15)、式(16),得到电流控制环如图3所示。
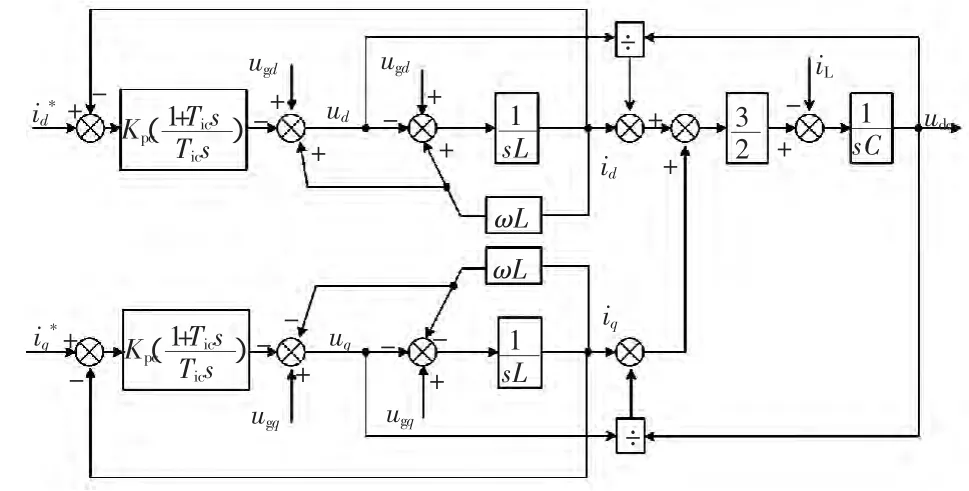
图3 电流控制环Fig.3 Current control loop
由图3可以看出,采用前馈解耦控制可将电流内环等效为一阶惯性环节,由于id、iq具有对称性,这里仅以id为例讨论电流调节器的参数整定方法。考虑PWM调制的效果,可以认为电流控制环包括4个环节,如图4所示。

图4 等效电流控制环Fig.4 Equivalent current control loop
图中,Tdu为对采样信号做滤波处理导致的延时;PWM环节代表AFE功率电路的放大及滞后效果,KPWM为放大增益,TPWM为AFE的失控时间,TPWM≈Ts/2;τ=L/R为电流环控制对象的时间常数;udis为考虑到电网电压变化及死时影响的等效扰动。
将图4中2个小时间常数的惯性环节合并,忽略小时间常数的高次项,得到等效惯性环节的增益为KPWM,时间常数近似等于1.5Ts。如果选择调节器的积分时间常数Tic=L/R,则电流环控制对象的一阶惯性环节可通过零极点对消,得到一个典型二阶系统,其传递函数为

根据PI调节器的工程整定方法,令阻尼比为

可得

由于式(17)中s2的系数远小于s的系数,因此忽略二次项,得到电流环的等效传函为

此时电流调节环的带宽近似为

2.2 直流电压调节器设计
首先可通过功率关系确定出直流电压和id、iq的关系。在电网电压定向的dq坐标系下,AFE输入的瞬时有功和无功为

通常AFE运行在单位功率因数状态,iq=0,于是直流电压只和d轴电流有关。考虑到电流环已等效为一阶惯性环节,引入PI控制器作为调节器,简化电压控制环如图5所示。
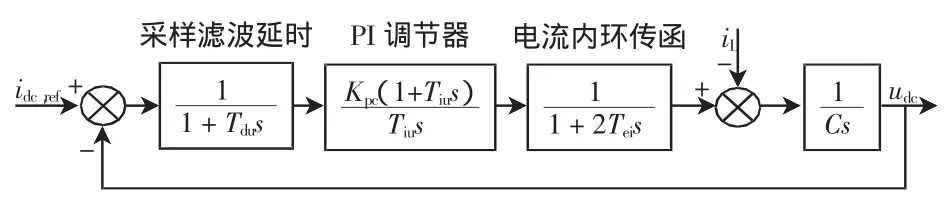
图5 电压控制环Fig.5 DC voltage control loop

式中,Teu为等效电压环时间常数,Teu=Ts+2Tei。
采用“对称优化法”对式(23)中的PI控制器参数进行整定,Hcu的穿越频率、相位裕度与系统参数满足

和电流环类似,电压环也可将小惯性环节合并并略除小时间常数的高阶项,得到等效一阶环节,即
式中:ωc为系统截止频率;φ为相角裕度;α为方便计算引入的比例系数,其计算式为因此,根据系统期望的截止频率和相位裕度,即可算出对应的Kpu和Tiu。

综合上述电压、电流控制环的结构,不难得出整个AFE系统的双闭环控制结构,如图6所示。
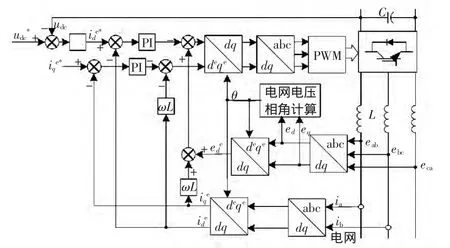
图6 AFE控制系统结构Fig.6 Structure of AFE control system
3 仿真验证
采用Matlab/Simulink软件对前述控制器设计及参数整定结果做了仿真验证,仿真系统结构如图1所示,其参数为:uga=311cos(100πt),V,网侧三相电压对称平衡;网侧等效电感、电阻分别为L=8mH,R=0.4Ω;直流侧电容C=2 200 μF;系统额定负载7.5 kW,采样时间200μs,采样滤波时间常数Tdu=1ms。由上述参数可算出电压环等效时间常数Teu=1.6ms;电流环和电压环调节器的参数为:Kpc=0.693,Tic=4ms,Kpu=5.294,Tiu=40ms。
图7给出了AFE系统突加负载时的启动过程。图中,AFE在0.5 s之前脉冲封锁,处于整流状态。从图7(b)可以看出,脉冲解封之前uab等于电网线电压;在0.5 s时刻,系统开始双闭环调节,脉冲解封,于是图7(a)中直流电压迅速上升至给定电压560 V,由于在参数设计中选择了较大的超调和截止频率,而且系统空载,因此udc的响应十分迅速,超调大约3.6%;在0.7 s时刻,直流侧突加7.5 kW电阻负载,直流电容对负载放电,导致直流电压突然降低,在双闭环调节作用下,电压迅速恢复至给定值,如图7(a)所示;由图7(c)可以看到,突加负载时网侧电流迅速增大,对应的有功输入迅速增大,支持直流电压的降低,说明电流环响应迅速且超调非常小;仿真中设置功率因数角为0,因此图7(c)中uga、ia同相。
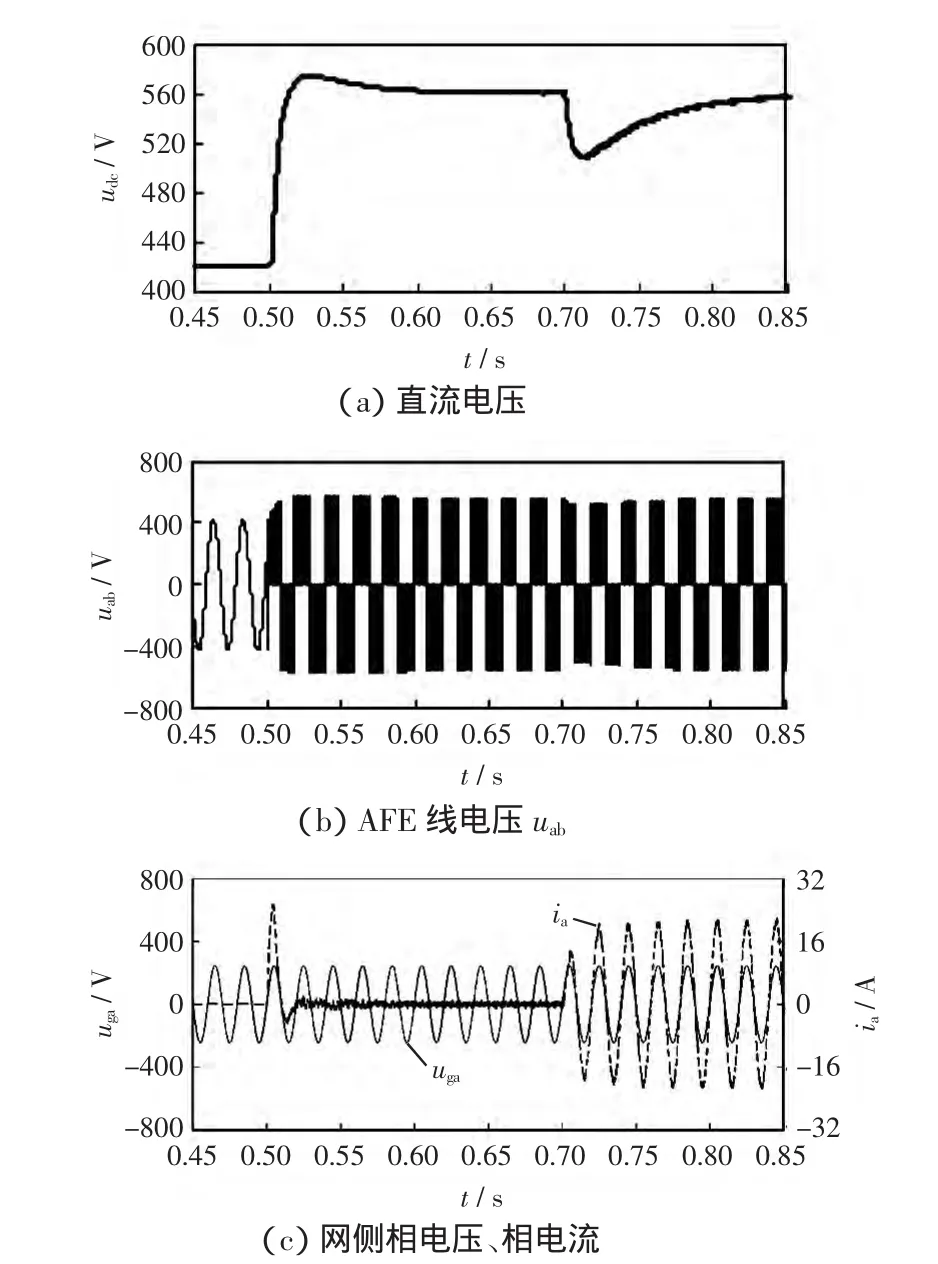
图7 AFE突加负载暂态过程Fig.7 Transient process of load disturbance for AFE
AFE向电网馈电时的电压、电流波形如图8所示。
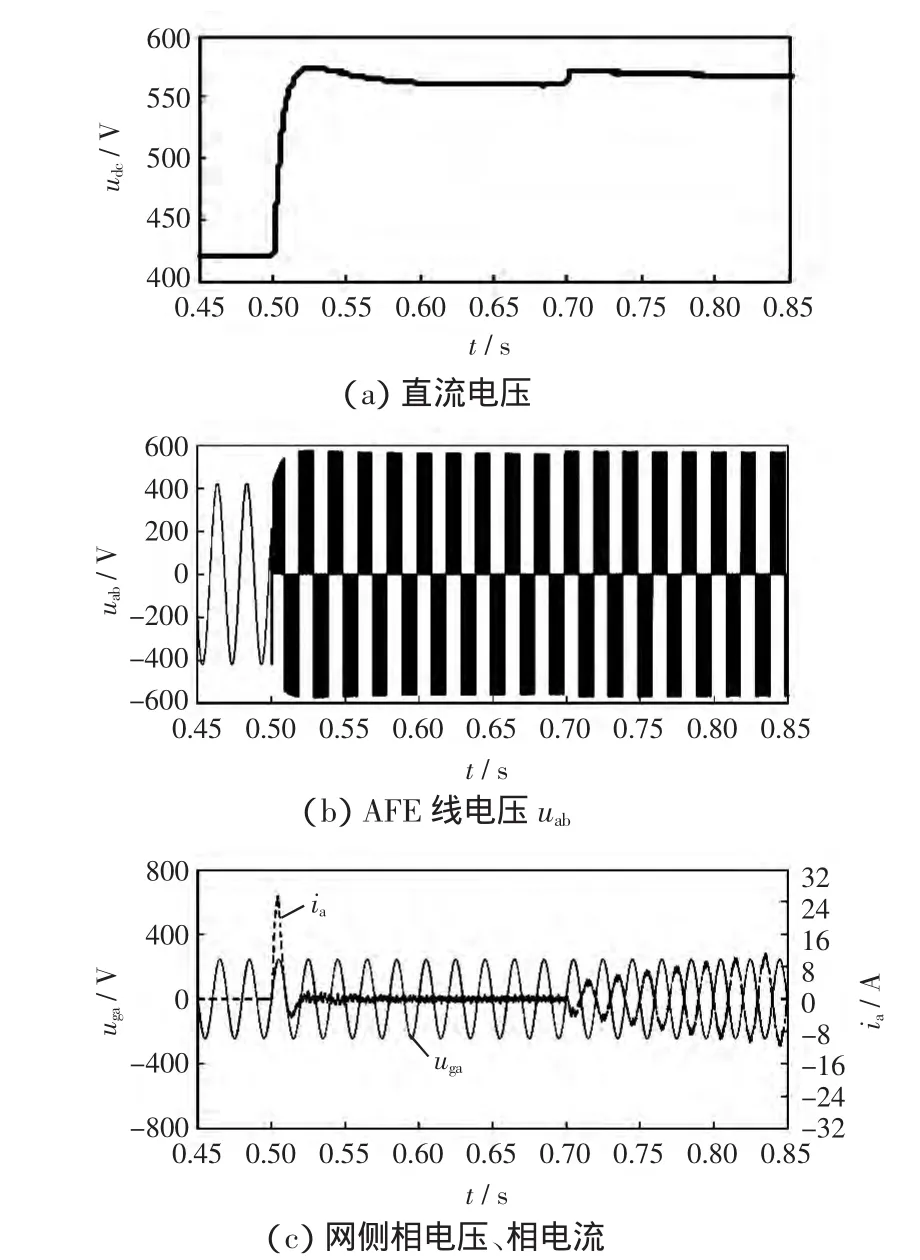
图8 AFE回馈运行Fig.8 Feedback operation of AFE
图中,AFE仍然是在0.5 s之前脉冲封锁,处于整流状态,0.5 s时刻解封后的电压、电流变化情况和图7相同。在0.7 s时刻,直流侧加入直流电源负载,且电压略高于AFE直流给定电压560 V,于是AFE开始向电网回馈电能。从图8(a)中可以看出,在负载电源加入瞬时,直流电压突然增加,之后在调节器的控制下逐渐趋于给定值。同时,网侧电流逐渐增加,AFE向电网馈入的能量逐渐增加,如图8(c)所示。由于无功电流给定为0,因此功率因数为-1,uga、ia反相。
综合图7、图8的结果,AFE的电压、电流调节迅速、准确,说明参数整定是有效可行。
4 结语
AFE作为一种灵活可控的整流器,具有网侧电流正弦、功率因数可调、可四象限运行等众多优点,已经在工业领域获得广泛应用。本文介绍了AFE系统在旋转坐标系下的数学模型,以此为基础设计了电压、电流双闭环控制器,采用“对称优化法”等频域分析方法整定了控制器参数。对实际物理系统的仿真结果验证了整定得到的PI参数能够满足稳定性及超调等指标要求。因此,所述建模及参数整定方法有效、可行,对实际系统设计具有很好的指导意义。
[1]AkagiH,Fujita,H.A new power line conditioner for harmonic compensation in power systems[J].IEEE Trans on Power Delivery,1995,10(3):1570-1575.
[2]蔡逢煌,郑必伟,王武(CaiFenghuang,Zheng Biwei,WangWu).单周期数字控制光伏并网逆变器的仿真与实验(Simulation and experimental of grid connected inverter based on one-cycle digital control)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2012,24(3):97-100.
[3]王成山,李琰,彭克(Wang Chengshan,LiYan,Peng Ke).分布式电源并网逆变器典型控制方法综述(Overview of typical control methods for grid-connected inverters of distributed generation)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2012,24(2):12-20.
[4]Habetler TG.A space vector-based rectifier regulator for AC/DC/AC converters[J].IEEE Trans on Power Electronics,1993,8(1):30–36.
[5]Busse A,Holtz J.Multiloop control of a unity power factor fast switching AC to DC converter[C]//IEEE Power Electronics Specialist Conference.Cambridge,USA:1982.
[6]Akagi H,Kanazawa Y,Nabae A.Instantaneous reactive power compensators comprising switching devices without energy storage components[J].IEEE Trans on Industry Applications,1984,20(3):625-630.
[7]Dewan S B,Wu R.A microprocessor-based dual PWM converter fed four quadrant AC drive system[C]//IEEE Industry Applications Society Annual Meeting.Atlanta,USA:1987.
[8]Wu R,Dewan SB,SlemonGR.APWMAC to DC converter with fixed switching frequency[C]//IEEE Industry Applications Society Annual Meeting.Pittsburgh,USA:1988.
[9]Wu R,Dewan SB,Slemon GR.Analysisofan AC-to-DC voltage source converter using PWM with phase and amplitude control[J].IEEE Trans on Industry Applications,1991,27(2):355-364.
[10]张兴(Zhang Xing).PWM整流器及其控制策略的研究(Study on the PWM Rectifier and Its Control Strategies)[D].合肥:合肥工业大学电气与自动化工程学院(Hefei:School of Electrical Engineering and Automation,Hefei University of Technology),2003.
[11]Awad H,Svensson J,Bollen M J.Tuning software phase locked loop for series-connected converters[J].IEEE Trans on Power Delivery,2005,20(1):300-308.