基于网络技术的远程控制系统探析
2014-04-14张扬
张 扬
(天津大学管理与经济学部,天津,300072)
1 远程控制系统设计与实现的关键技术
1.1 Web 技术
Web 属于一种分布的典型性应用技术,在每一次进行信息的交换的时候,都会涉及到服务端和客户端这两个方面,但是在相互的连接中,服务端与客户端主要是采取的JSP 鱼XML 技术。当然,也不能忘记编程语言技术,比如:有HTML 和插件技术这一些方面。考虑到远程控制系统设计,本文相对关注于Web 技术的应用重要性,在设计中,系统主要包含了视图层、应用逻辑层和数据层,详细见下图一当中所示。
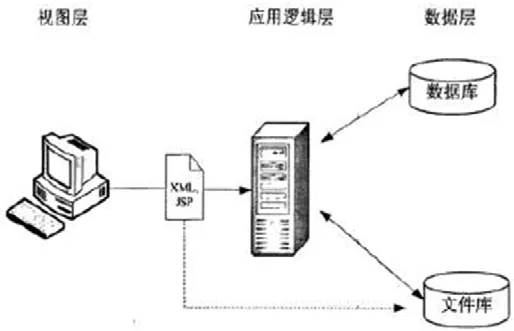
图一 逻辑模型
数据层是整体系统的基础所在,主要是包含了文件、业务的数据库和映射规则库,其中,文件数据库主要是对各种服务请求存储的生成性文件,业务数据库是对各种业务所需要的数据的存储,映射规则库主要储存的是最基本的系统映射规则。
应用逻辑层是对视图层当中用户的服务需求进行处理,拥有连接作用,之后,在数据库中调取相应的数据文件,这样才可以有利于用户的数据处理、管理以及数据的查询。用户直接接触的是视图层,其主要包含了请求与展现两个方面的业务功能。
1.2 直接控制
直接控制技术又称之为木偶式的控制技术,也就是远端控制者全面控制设备。在这一操作过程中,在发送了控制指令函数之后,才能够完成一项或者是多项操作。但是考虑到对于控制着本身的能力要求高,并且还需要对编程语言、控制设备的底层指令都有一个全面的了解。
2 远程监控系统的应用与改进
2.1 网络时延问题
在解决了网络传输问题和数据的压缩之后,远程视频监控系统需要面对的是时间延迟的问题。机械臂远程视频监控系统只有通过网络才能够对控制的信息以及运动状态所反馈的信息进行有效的传递,因此,网络信息传递本身具有的特性,也会直接对机械臂远程视频监控系统加以影响。其网络延迟框图具体如下图二。
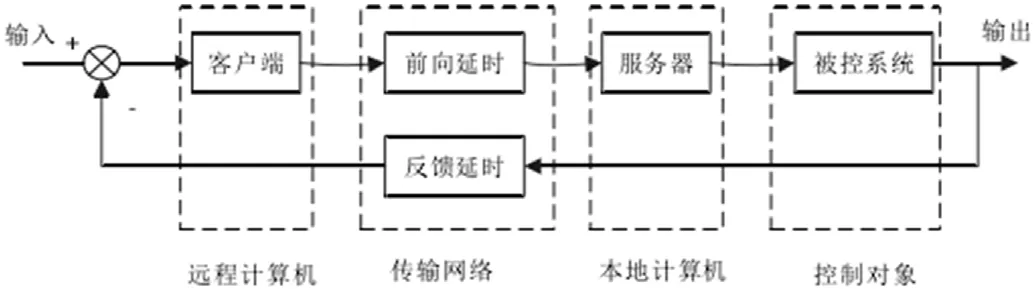
图二 远程视频监控系统网络延迟框图
控制器与被控制的对象由于受到存在延时的影响,也会被打乱同步,从而影响到系统正常运行和稳定运行。如果被控制的对象受到了前往通道的延时,那么在一定的时间段之内,就无法获取相应的信息;如果是出现了反馈通信的延时,那么在一定时间段内,也无法获取反馈的相应信息。
拥有良好的控制品质,并且控制系统处理稳定状态,才能够在进入到网络后,因为延时,就使得机械臂的运动状态所反馈的信息与控制信息相对滞后,这样也会影响到系统整体稳定性,如果可以减小或者是消除延时影响,对于系统的工作性能提高有极大的推动作用。
2.1.1 时延的构成
一般来说,较为典型的远程监控系统主要是由图三当中的几个部分共同的组成:

图三 远程监控系统的时延组成图
通过上图,可以看出其时延主要是tl+t2+t3+t4。其中:
t1:在发送指令时,客户端出现的延时;
t2:在进入到现场控制的是偶,服务器也会出现操作上的延时;
t1,t2由反馈、处理时间共同的组成。反馈时间指的是通过摄像机与传感器拍摄到的机械臂的运动状态数据进行编码和压缩之后,从而形成有利于传输与处理,并且很容易辨识的数据格式所耗费的时间。系统处理时间指的是客户端指令在服务器端接收到后,进而分析、处理指令,使得其转变成为机械臂能够辨识的命令,并且对机械臂需要完成客户指令的时间进行控制。
t3:主要是控制好命令传输的延时,也就是在指令发送中,客户端传送到服务器端出现的延时;
t4:在传输现场数据出现延时,当信息传输到客户端这一个阶段出现的延时。
t3和t4的长短主要是取决于传输的方式以及传输的介质。基于网络的远程控制系统,系统实时性的决定因素是传输时间,所以,应该进行合理的设计,并且选择一定的网络传输协议,确保所耗费的时间最短的目的,这样也有利于实时性的改善。
2.1.2 时延的构成,在TCP/IP 协议下
当前,基于TCP/IP 协议下的网络传输时目前的国际因特网通信标准,由于数据流量在这一个协议网络当中是随时变化的,所以,主要是根据数据的流量进行路径的选择,时刻不同,其数据通过的路径也会有差异,并且,数据流量不同,在节点数据报的路过处理中也会有差异,这就使得一个不确定的变量出现在了通信延时之中。
通过选路,在这样的系统之中,数据包就会从主机传递到远程主机上,在网络设备的选择上,也是根据上述的路由器原理进行的,也可以将网络延时T 通过公式来表达:

主要是通过以下几个方面组成:
第一,Ts指本地的主机在数据的处理上存在的延时。在数据信元被应用程序传递到协议软件的时候,协议软件与数据都会从应用层到网络层逐层次地处理,等待处理完毕后,再进行发送处理。
第二,Tp指的是信号传输的时候,物理线路上出现的延时。在物理线路之上,传输的数据信号基本上都是光速,相比整体的延时,这一类型延时完全不是一个级别,所以,在通过决定延时大小的主要依据并非是通信节点之间的地理距离。
第三,Tr 指的是数据处理中,中间路由器出现的延时,在数据流收到之后,其解释也需要由路由器将其传送到网络层之上,提供下一次跳目的地址的选择,在选路的过程中,Tri 和多个路由器处理的延时就是其主要的部分之一。
第四,Td 指的是数据处理时,远程主机出现的延时。在数据报收到之后,远程主机需要做出解释,并且重新的校验与排序,之后再在应用层进行相应的处理。
2.2 网络时延的测定
在测量网络传输延时的时候,根据承载的协议,主要是分为:
2.2.1 通过ICMP 的利用来实现
对于延时测量而言,ICMP 是最典型的方式之一,也就是Ping 命令,主要是则针对请求与应答,在基础ICMP 之下开发出来的软件。在Ping 从发送端朝着接收端进行发送时,等待接收端收到报文之后,就会立刻反应,返回一个应答报文,在发送受到之后,就可以利用时接收到的时钟以及发送的时钟,就可以计算出往返之中出现的网络的传输延时。
2.2.2 通过UDP 的利用来实现
如果因为安全等方面的原因导致,在制定目标地址或者是中继节点的时候,ICMP 报文被滤掉,那么,就可以利用UDP 报文在网络延时测量中加以实现。UDP 的实现与ICMP 是一样的,都是无连接的方式,但是不同的是UDP 协议还需要指定的端口来加以实现。
TCP 属于面向连接的可靠性传输协议,但是TCP 需要数据包头的复制,所以,在实现方面会很复杂,一般都不会用于测试。但是,如果防火墙将前面的两种报文过滤掉,这样的情况下就可以考虑到此协议的使用。
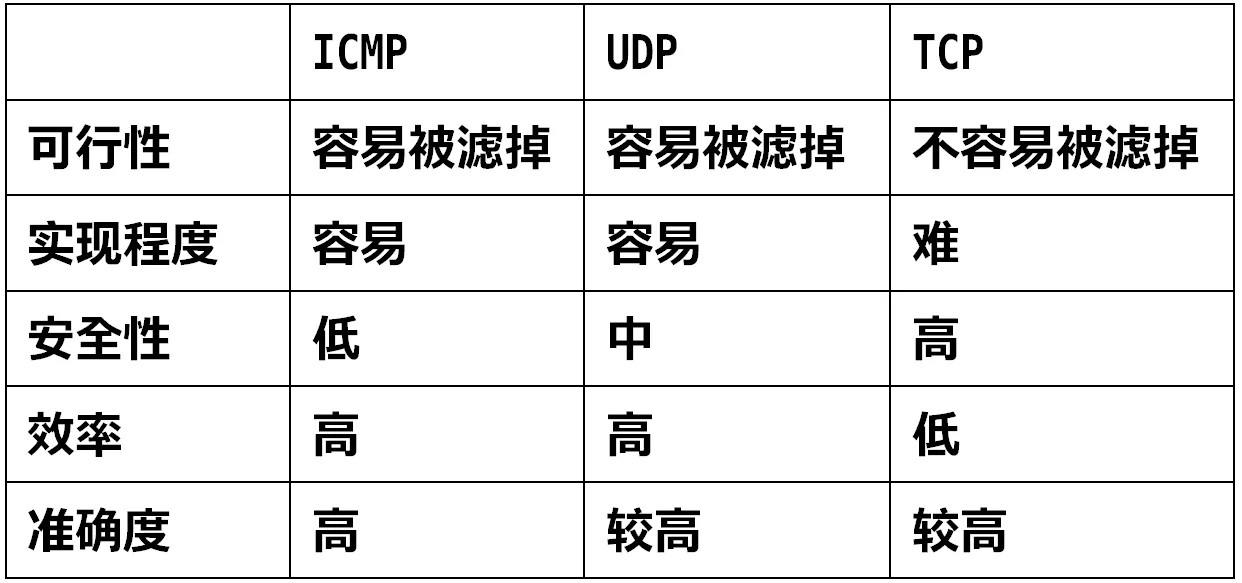
表1 三种方式比较
在这一个过程中,我们可以假设在应用程序当中有一个程序包的撒送被设定出来,N 个字节是其大小,在达到了网络层的时候,数据包就会被封装成为IP 数据报,具体如图四
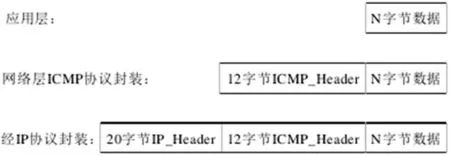
图四 数据包封装过程
因此,在发送端的应用程序进行N 字节数据报发送的过程中,就能够得到IP 数据报,并且对于IP 数据报也可以根据套接字做出分析处理,同时也能够获取一部分的相应信息,这样不仅可以计算出丢包率,同时,还可以得出网络的延时。
在测试程序的编写中,具体框架如图五的编程。
Q u e r y P e r f o r m a n c e C o u n t e r ( ) 和QueryPerfortnanceFrequency( )属于在时间上对精度有着更高要求的函数,其精度达到了微秒级别。另外,在硬件方面也要求了高精度计时器相互配合。如果是不相同的系统,那么也可能出现不一样的情形,这与操作系统以及硬件设备有着一定的联系。而两个函数的实际原型在于:
LARGE_INTEGER 不仅仅是8 字节长的数据整体类型,同时也可以划分成为两个4 字节,具体的方式,还是要考虑到对于64 位是否能够加以支持。具体的定义。

3 结束语
随着现代信息技术的快速发展,控制技术、通信技术等都取得了一定的发展。另外,最近几年来,国内外的学者对于现场控制设备以及互联网之间的相互连接也进行了相应的研究与分析,在一定程度上也创造了有力的条件来促进控制领域和信息领域之间的相互融合,由于多个方面的影响因素,因此,在今后的控制领域中,网络技术的远程控制系统必定会成为主攻的方向之一。
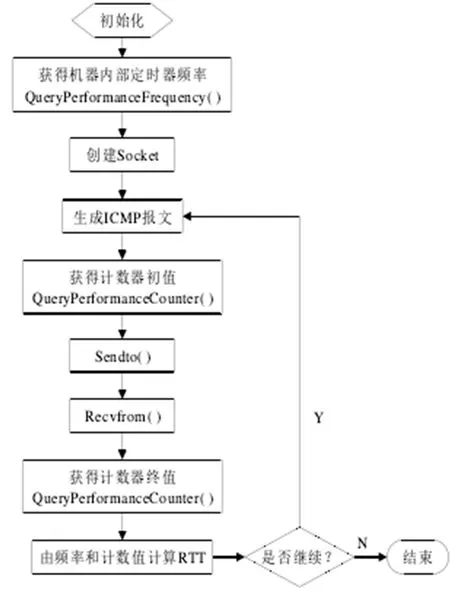
图五 基本流程图
[1] 徐淑萍,苏小会.基于Internet 的远程控制系统网络时延分析研究[J].微电子学与计算机.2011(07):77-79
[2] 温阳东,李彧.网络控制系统的时延估算及补偿[J].微型机与应用.2011(13):45-46
[3] 李肖,何芳.模糊控制对网络控制系统性能的改善[J].济南大学学报(自然科学版).2010(04):89-91
[4] 张晓晖,刘丁,李攀.基于网络的机器人远程控制系统实现与研究[J].机械科学与技术.2007(06):77-78
