一种用于船载卫星天线的角速度计零漂校正方法
2014-04-03
(清华大学自动化系,北京 100084)
0 引言
船载卫星天线的指向需要与卫星方向保持一致,通常使用角速度计测量船舶的颠簸,所以角速度计是天线控制系统中重要的反馈元件。微机电系统(micro-electro-mechanical system,MEMS)角速度计虽然成本较低,但易受环境温度影响,性能不够稳定。此外,零点输出会产生温度漂移和随机噪声,环境温度特性曲线也会因为器件老化发生变化。文献[1]~[3]叙述了天线运动的坐标变换问题;文献[4]使用倾角仪的输出来纠正角速度计的零点;文献[5]~[9]使用AR模型和Kalman滤波等方法来处理随机噪声。这些方法均不适用于船舶环境。
本文利用船载卫星天线控制系统[10]的结构框图,说明角速度计的温度漂移对整个系统的影响,并提出一种利用卫星信号功率的圆锥扫描数据来动态校正角速度计零点漂移的方法,并用试验证明其有效性。
1 船载卫星天线控制系统结构
本文所指船载卫星天线接收信号为地球同步卫星信号,卫星信号的频率为C波段或者Ku波段,在此频段上卫星信号具有很强的方向性,客观上要求天线的指向必须和卫星信号的方向一致,其允许角度误差使用天线波束宽度的倍数(0.01~0.5)来表示。船只在航行过程中受到风浪的干扰时产生摇晃,船载卫星天线控制系统必须对船体的干扰进行补偿以稳定天线的指向,进而保证一定的接收信号功率。
稳定天线指向即稳定三个角度:方位角、俯仰角和极化角。极化角的扰动对信号功率的影响很小。本文的船载天线针对圆极化型设计,船载卫星天线控制系统仅需稳定方位和俯仰两个方向的角度。设天线的方位旋转平面的法线垂直于底座,俯仰旋转平面的法线垂直于方位旋转平面的法线。
系统主控制器利用角速度计测量船体对天线指向的扰动。为了使天线对准卫星,需要测量出天线指向与实际信号方向的偏差。利用圆锥扫描技术测量角度偏差的方法是:在使用角速度计信号稳定天线指向的基础上,控制器使天线绕指向轴做小范围的圆扫描运动。馈源的运动轨迹是圆形的,运动轨迹与天线中心的连线构成“圆锥”面,故称为圆锥扫描。图1为圆锥扫描工作过程示意图及各角度定义。
图2是利用角速度计传感器的船载卫星接收天线跟踪控制系统结构框图。图2描述的仅是天线一个方向上(方位角或者俯仰角)的控制结构,虚线内部分为本文提出的温度补偿环节,fd(Rm)为角速度计零点补偿函数。设天线扫描角速度为ω,某时刻天线扫描相位为φn=ωtn,与φn对应的天线信号输出功率为Rn。

图1 圆锥扫描工作过程及各角度定义

图2 天线控制系统结构框图

2 温度漂移对跟踪系统的影响分析
在图2所示控制系统结构中,外环角速度计的反馈带宽大于10 Hz,而内环天线指向误差的计算速度很慢,因为完成一次指向误差的计算至少需要圆锥扫描一个周期,因此内环的反馈带宽一般小于1 Hz。当角速度计发生温度漂移时,控制程序中使用的角速度计零点和真实值存在较大偏差,这可能造成天线系统信号丢失,影响设备的正常使用。针对角速度计的温度漂移,对角速度计进行建模,角速度计温度漂移模型如图3所示。令温度漂移C为温度T的函数,当C(T)不为零时,由于积分作用,角速度计的输出误差迅速积累,从而不能准确测量姿态的变化情况。

图3 角速度计温度漂移模型
当角速度计输出有温度漂移时,在升温和降温过程中的测试曲线分别如图4和图5所示。

图4 升温过程中的测试曲线

图5 降温过程中的测试曲线
在两次测试过程中,分别对环境温度进行了上升(20~80 ℃)和下降处理(80~30 ℃),从而主动改变角速度计的零点,该过程中没有扰动。由于天线做圆锥扫描运动,所以方位角和俯仰角上的速度计是有输出的。从图4和图5可以看出,当温度上升到60°或下降至50°时,信号强度开始下降,控制系统的稳定性变差,随着温度的不断上升或下降,信号强度降到噪声水平,信号跟踪失败。下面提出一种利用接收信号的功率变化来动态校正角速度计零点温度漂移的方法。
3 校正算法
处理温度漂移的一般方法是对角速度计进行标定,然后把温度-零点特性函数C(T)存储在存储器里,供MCU随时调用。由于角速度计的个体特性不同,因此需要针对每个角速度计进行标定。另外,由于长时间使用或器件老化,设备出厂后还需要定期对温度-零点特性数据进行校准,因此,这种常规方法不利于批量生产和实际应用。本文描述的方法是通过对卫星信号强度变化规律的识别,实现对零点自校准,即使外界温度不断变化,也不影响设备的正常使用。自校准结果的好坏体现在天线信号跟踪性能上,以达到最终连续接收信号的目的即可。校正算法的具体步骤如下。
首先,采用试验的方法对天线的信号强度数据进行采集,而后建立天线角度与信号强度数学模型。接下来分析圆锥扫描得出的数据与角速度计零点之间的关系,从而得出角速度零点-信号强度函数fd(Rm)。角速度零点补偿函数的作用是动态校正零点温度漂移,提高天线应对环境温度变化的能力。
抛物面天线方向图与抛物面、馈源的设计和制造有很大关系,所以有必要针对所使用的天线进行实际的信号测试。信号的功率强度通常不能直接测量,但可以通过调谐器输出的自动增益控制信号来近似表示。利用天线测试转台得到的天线方向图如图6所示。天线方向图都有副瓣,这里仅显示主瓣部分,边界信号强度升高部分为副瓣影响。受外部信号干扰,图中网格线不够规整。
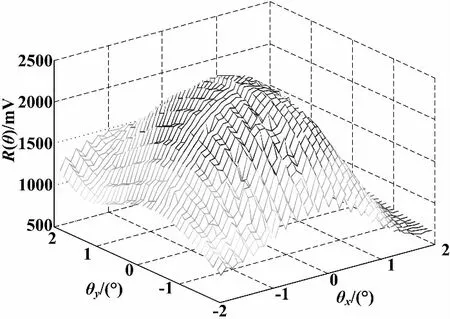
图6 实测天线方向图
图6中:θx、θy分别表示方位和俯仰方向上的偏角;R(θ)表示信号强度大小。
r=R(θ)
(1)
式中:0≤θ≤2π。
根据图6所示数据,对R(θ)曲线进行拟合,结果如图7所示,得到R(θ)的拟合式为R(θ)=-3.5θ2+2 312.1。
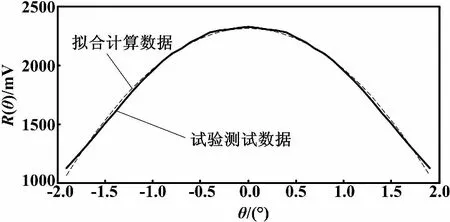
图7 天线主瓣强度曲线的拟合曲线
下面结合圆锥扫描工作原理,计算角度偏离与信号功率强度的关系。天线误差角的极坐标系如图8所示,从圆锥扫描的截面上来看,原点O为卫星信号中心,天线指向误差角θ0由极坐标系来表示,误差角坐标为(re,φe)。

图8 天线误差角的极坐标系
设圆锥扫描的两个轴向角度运动描述为:
(2)
(3)
化简后得:
式中:ω和θc已知。

控制系统依靠角速度计检测船只的颠簸干扰,完成快速的反馈跟踪控制。但通过圆锥扫描得到的天线指向误差角如果不接近于零,说明控制效果不佳,其原因可能是角速度计的温度漂移所导致的偏差。其他如数值模型和计算的误差、机械转动精度、角速度计精度、电源和电路的随机噪声等导致的偏差都相对较小。
在经过圆锥扫描求解误差角的基础上,通过对误差角变化的判别可以得出角速度计温度漂移补偿函数fd(Rm)。设(rek,φek)(k=1,2,…,m)为一段时间内m个误差角序列。误差角序列(rek,φek)(k=1,2,…,m)在一定时间内应该均匀分布在如图8所示坐标系的四个象限。当角速度计在一个或者两个轴向上存在温度漂移时,误差角序列的连线则会趋向这个漂移的方向。设采样周期为ts、周期T=mts、阈值εx和εy,当∑rekcosφek≥εx(k=1,2,…,m)或者∑reksinφek≥εy(k=1,2,…,m)时,对相应轴向的角速度计进行温度漂移补偿,补偿量为减去(∑rekcosφek)/Kx或(∑reksinφek)/Ky(Kx和Ky为常数)。
4 试验结果
使用同样一套天线对算法进行验证,在采集数据的过程中进行加温和降温处理,并且给予外部随机扰动,测试结果如图9和图10所示。

图10 使用温度补偿时降温过程测试曲线
因为天线不停地做圆锥扫描运动,所以方位和俯仰方向上的角速度都有输出。根据测试结果可知,当没有使用温度补偿方法时,温度变化稍大,信号强度不稳定,达不到控制天线指向的要求;而使用本文温度补偿方法后,尽管温度大幅度变化,无论温度升高还是下降,信号强度都没有发生较大变化,始终保持相对稳定,并且能够稳定地抵抗外界扰动。
5 结束语
本文利用船载卫星天线的控制系统框图,结合圆锥扫描分析了指向角误差的特点。采用卫星天线接收信号功率的扫描数据计算指向角误差,根据误差数据累计的判别,动态估计零点漂移趋势,得到了一种能有效解决角速度计温度漂移的方法,并通过试验证明了方法的有效性。该方法提高了MEMS角速度计在船载卫星天线领域的性价比,温度漂移校正的效果直接体现在天线跟踪性能上,具有明显的实用价值。该方法不但适用于单向接收天线,而且对双向通信天线的应用也有很好的指导意义。
[1] 赵来定.姿态测量单元在船载卫星天线上的应用[J].计算机测量与控制,2006,14(3):285-292.
[2] 李圣明,施游互,孝番林,等.一种低成本MVSAT天线指向控制系统设计[J].自动化仪表,2008,29(4):33-35.
[3] 邹丽娟,黄建国.基于圆锥扫描的舰载卫星电视天线跟踪系统[J].现代雷达,2004,26(10):68-70.
[4] 解思梅,郝春江,邹斌.新型船载气象卫星接收系统[J].海洋学报,2000,22(4):31-40.
[5] 孟中,张涛.降低动力调谐陀螺输出噪声的方法[J].光学精密工程,2002,10(4):420-424.
[6] 张智永,范大鹏,李凯,等.微机电陀螺零点漂移数据滤波方法的研究[J].中国惯性技术学报,2006,14(4):67-69.
[7] Kirkko M,Collin J,Takala J.Bias prediction for MEMS gyroscopes[J].IEEE Sensors Journal,2012,12(6):2157-2163.
[8] Shi G X,Yang S X,Su Z.Random drift suppression method of MEMS gyro using federated Kalman filter[C]//2011 3rd International Conference on Advanced Computer Control,2011:274-277.
[9] Yang J X,Zhang Y.Research of de-noising for micro-mechanical gyro signal based wavelet transform[C]//The 2nd International Conference on Power Electronics and Intelligent Transportation System,2009:344-347.
[10] Densmore A,Jamnejad V.A satellite-tracking K-and Ka-band mobile vehicle antenna system[J].IEEE Transactions on Vehicular Technology,1993,42(4):502-513.
