法向加速度传感器故障监控方法研究
2014-04-03张坤陈林
张坤,陈林
(中航工业洪都,江西南昌330024)
0 引言
为了满足可靠性要求,电传飞行控制系统一般采用四余度配置,并通过余度管理实现四个余度系统之间的协调工作,当单个功能组件发生奇异故障或第三次故障时,一般通过在线监控进行辅助判别,以避免系统降级太快。而法向加速度传感器由于其构造及原理,很难通过线路实现在线监控,只能进行控制律重构,这将导致系统降级太快。本文主要是针对电传飞行控制系统法向加速度传感器在发生奇异故障或发生第三次故障时,采用一种模型监控的方法进行辅助判别,从而提高电传飞行控制系统的可靠性,并通过仿真进行分析验证。
1 组成及工作原理
法向加速度传感器用于敏感法向方向的线加速度,并输出与加速度值成比例的直流电压信号,提供给飞控计算机用于控制律计算。法向加速度传感器为四余度单轴摆式伺服线加速度传感器,主要由检验质量、电容传感器、力矩器、伺服电路和支撑结构等组成。
加速度传感器的工作原理如图1所示。

图1 加速度传感器工作原理
当飞机沿法向有加速度a时,单摆偏θ角,差动电容传感器产生ΔC的电容差,ΔC经驱动检测转换为电流,经校正、放大后,通过采样电阻R转换为电压输出,到飞控计算机。
从图中可以看出,传感器本身没有实现完整的在线监控,现采用模型监控的方法进行在线故障诊断。
2 基于模型监控的故障诊断
2.1 模型监控原理
考虑加速度传感器自身无法实现在线监控,为了防止加速度传感器故障导致飞控系统降级太快,影响飞行安全,现通过模型监控的方法进行故障诊断,故障诊断的基本原理如图2所示。

图2 模型监控原理图
2.2 监控模型的建立[1]
重心处的法向加速度在航迹坐标轴系中的分量为
考虑到加速度传感器敏感的是重心处机体坐标轴系中分量,因此需将法向加速度从航迹坐标轴系转换成机体坐标轴系,转换公式如下:

上式中的v用p、q来表示,将通过下式求得:
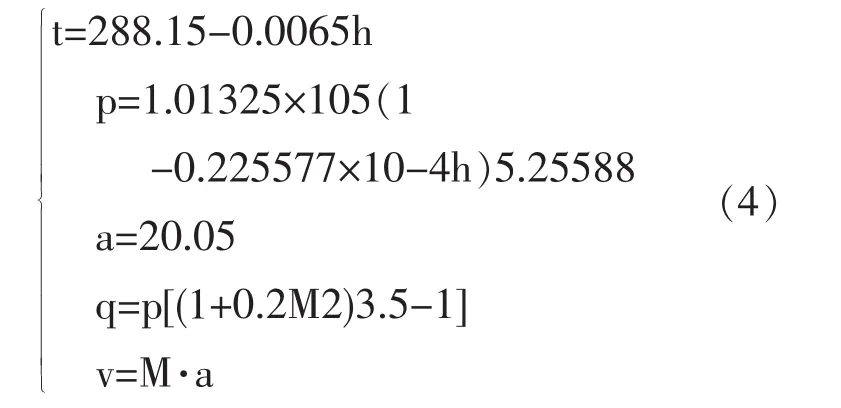
根据上式(4)可求得

由(3)式和(5)式求得

根据上式 (6)可以看出,在模型解算时,利用飞控系统的动静压信号、俯仰速率信号以及迎角信号可以构造一个重心处机体坐标轴系中法向加速度信号。
2.3 仿真分析
根据试飞数据,将飞控系统实测的加速度数据与解算得到的加速度数据进行比较,比较结果如图3所示。
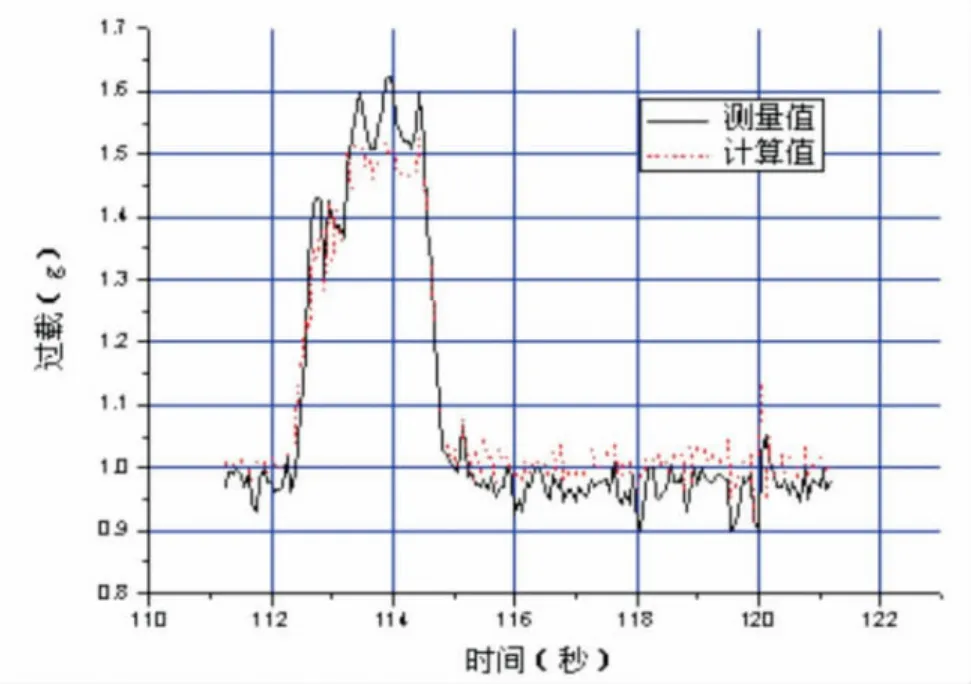
图3 测试数据与解算数据比较
从图中可以看出,通过解算的加速度数据与实测的加速度数据一致性较好,可以作为法向加速度信号故障时的辅助判别用。
3 可靠性计算
针对法向加速度传感器的余度管理,在没有模型监控的情况下,当发生奇异或三次故障时,控制律重构,其任务可靠性框图如图4所示。采用模型监控时,当发生奇异或三次故障时,可以通过模型监控进行辅助判别,其可靠性框图如图5所示。

图4 不带模型监控的可靠性框图
图5 带模型监控的可靠性框图
参考有关资料,单个加速度传感器的失效概率为17×10-6次/飞行小时。求得单通道加速度传感器的可靠度为RS(t)=e-λt=e-17×16-6=0.9999830001。
不带模型监控的表决系统的可靠度为:

带模型监控的表决系统的可靠度为:
故不带模型监控的四余度传感器的失效概率为2.031×10-11次/飞行小时。带模型监控的四余度传感器的失效概率为8.352×10-16次/飞行小时。
因此,对飞控系统来说,增加模型监控,可降低失效概率为2.0309×10-11次/飞行小时。
4 结语
本文从提高飞控系统可靠性角度,提出一种加速度传感器故障的辅助判别方法,并通过仿真及可靠性计算得出其提高可靠性的有效性,该辅助判别方法及思路可作为飞控系统余度管理策略设计的参考。
[1]刘品.可靠性工程基础[M].北京:中国计量出版社,2002.
[2]顾诵芬.飞机飞行品质[M].北京:中华人民共和国航空工业部,1983.
